
[Back to the main menu]
[db menu: active projects
- available projects
- early-assigned projects
- completed projects]
Completed Projects (archive)
The following is a list of completed projects including links to posters and reports.
| Prj # | Supervisor | Project title | Allocation date | Student(s) | Poster | Report |
| 1290 | Mehmet Demir | Fingerprint-Recognition Based Smart Locking System | 2025 Spring | Ibrahim Aslanpay, Yahya Faruk KáÝláÝnûÏ, Ali Aslan, , , | ||
| 1288 | Mete Vural | PWM control of a universal motor | 2025 Spring | Muhammed Mustafa Ceylan, Ahmet Piliz, Bû¥nyamin Gû¥rler, , , | ||
| 1287 | Mete Vural | Implementation of PID controller on Arduino for speed control of a DC motor | 2025 Spring | Salim AydáÝn, Furkan Ozdinc,Miray Colakoglu, , , | ||
| 1285 | Ergun Erçelebi | Remote Speed Control of BLDC DC Motors for Drones | 2025 Spring | Melih Malyemez, Tahsin Demir, Rasim Budak, , , | ||
| 1278 | Seydi Kaçmaz | Smartphone-Based Vehicle Paint Inspection Using UV Light | 2025 Spring | KazáÝm Can Balkan,TaráÝk Kolutek, Soltan Nazarov, Muhammed Kaya, , , | ||
| 1277 | Sema Kayhan | Monitoring System for Car/Bicycles | 2025 Spring | Efe Demir,Mehmet Alperen Gebel, Emir Berat Yuce, , , | ||
| 1276 | Sema Kayhan | Monitoring System for Car/Bicycles | 2025 Spring | Seyma Sibel CamsaráÝ,Burak Dagasan, Sumeyye Sehitoglu, , , | ||
| 1275 | Arif Nacaroğlu | Design, construction and application of motor and motor driver for electrical vehicles | 2024 Fall | Dogukan YazáÝcáÝ, , , | ||
| 1274 | Musa Bute | Design of face recognition glasses for the visually impaired | 2024 Fall | Cengiz Sen, Mustafa Karatas, Yunus Karageyik,Alper Bulut , , , | ||
| 1273 | Serkan Özbay | Sea Wave Energy Harvesting | 2024 Fall | Murat BahadáÝr Eyice, Utku Celik, Furkan BahûÏekapáÝláÝ, Nihat Cakmak, , , | ||
| 1272 | Uğur Cem Hasar | Microwave sensor for detection of concentration of phosphate and nitrite mixture in water. | 2024 Fall | Ahmet Hakan AcáÝkgoz, Mehmet Akif Gursoy, Necla Sincar, Betul AydáÝn, , , | ||
| 1271 | Taner İnce | Solar Panel Cleaning Robot | 2024 Fall | Ipek TáÝstáÝk, Dilara Gû¥rkan, Hasan Bedir Ates, , , | ||
| 1269 | Ergun Erçelebi | Devepolment of Connected weareble ECG Device | 2024 Fall | Nisa Nur Aksahin, Zeynep Akgun, Zeynep Mecan, , , | ||
| 1262 | Ali Osman Arslan | PV Panel Cleaner | 2024 Fall | á¯brahim OKUDUCU ,Mehmet kapgáÝ ,Ebubekir Dogan,Abdullah Yigit Kalaz, , , | ||
| 1261 | Ali Osman Arslan | PV Panel Cleaner | 2024 Fall | Yusuf Sahin, Talha Kursat Ozdemir, Berat BaldáÝz, , , | ||
| 1260 | Sema Kayhan | Smart Car Parking System | 2024 Fall | Malek Barakat, Fares Bazazoa, Esra Cetinkaya, , , | ||
| 1259 | Sema Kayhan | Smart Car Parking System | 2024 Fall | Abdurrahman Aljaser , Muhammed elsiveg, Moaaz Reda Fawzi, , , | ||
| 1257 | Serkan Özbay | Autonomous Parking Robot Design | 2024 Fall | ABDELRAHMAN SALAH MAAROUF KAMEL, FATá¯H SIMSEK, YAMEN MUSTAFA, Murad Shirinli, , , | ||
| 1255 | Seydi Kaçmaz | Infrared Vein Imaging System Using a Smartphone | 2025 Spring | Melih Yilmaz, Muhittin Gunes, Furkan Aydemir, , , | ||
| 1254 | Sema Kayhan | Smart Glasses for the Visually Impaired | 2024 Spring | Mert Bacaksiz, Onur Anilir, Muhammed Furkan Ari, Hasan Salih Durukan | ||
| 1253 | Mahmut Aykaç | Software Developer Keyboard | 2024 Spring | Rabia Sultan Hidayet, Mehmet Emin Erbulut, Furkan Gok, | ||
| 1252 | Mahmut Aykaç | Telemetry Communication and Control System | 2024 Spring | Ali Mert Ozsoylemez, Semih Poyraz, Abdulkadir Goregen, | ||
| 1251 | Ali Osman Arslan | Development and Implementation of vehicle license plate recognition and processing system | 2024 Spring | Suleyman Dasoluk, Suphi Emre Benli, Metin Volkan Dana, | ||
| 1250 | Ali Osman Arslan | Development and Implementation of Smart Battery Charger with SMPS Topology | 2024 Spring | Burak Yasar, Muhammed Said Tokgoz, Ali Emre Gulecoglu, | ||
| 1249 | Arif Nacaroglu | Design an realization of the parallel plate system | 2024 Fall | Emirhan Cengel, Ekin Arman Dogan, , , | ||
| 1248 | Sema Kayhan | Smart Locking | 2024 Spring | Huseyin Emir Kir, , , | ||
| 1247 | Mete Vural | Electromagnet accelerator | 2024 Spring | Mehmet Goktug Cetin, Dogukan Mert Ozdemir, Ahmet Mirza Anteplioglu, | ||
| 1246 | Mahmut Aykaç | Real Time Modified Sign Language Recognition | 2024 Spring | Talha Eray Dogan, Furkan Temiz, KasáÝm Soker, | ||
| 1244 | Seydi Kaçmaz | Motion Detection and Tracking System | 2024 Spring | Mustafa Can Aslan, Fevzi Okkes Dagli, Feyzullah Eren, Busra Celik | ||
| 1243 | Serkan Özbay | Design of corset type electric heat warmer and massager | 2024 Spring | Batuhan Dogan, Eyup Yildiz, Ali Engincan Bayiltmis, Tunay Yildiz | ||
| 1242 | Serkan Özbay | Design of corset type electric heat warmer and massager | 2024 Spring | Melih Ayberk Onal, Memet Polat, Ercan Kurt, Metehan Tutarga | ||
| 1241 | Musa Bute | Wireless Phone Charger Using Inductive Coupling | 2024 Spring | Omer Faruk Izmir, Mucahid Polat, Furkan Alper Ozbay, Hukumran Onur Kocyigitoglu | ||
| 1236 | Sema Kayhan | A Tracking system for Alzheimerãs Patient | 2024 Spring | Muhammet Yasin Basak, , , | ||
| 1227 | Uğur Cem Hasar | A microwave Measurement System for Noninvasive Detection of Moisture within Agricultural Products (Grains) | 2024 Spring | Betul Ekren, Duygu Coban, Hakan Andik, | ||
| 1222 | Ali Osman Arslan | BATTERY MANAGEMENT SYSTEM FOR ELECTRIC BIKES | 2023 Fall | Muhammed Kursat Basturk, Hasan Huseyin Osanc, Zeynep Ozturk, Yusuf Dalak | ||
| 1221 | Uğur Cem Hasar | Non-invasive Microwave Sensor Blood Glucose Meter Integrated with Artificial Intelligence and Its Own Mobile App (GlucoTrack App) Using Bluetooth | 2023 Fall | Kutay Bolukcu, Ali Riza Ayhan, Furkan Karakas, Enver Yildirim | ||
| 1220 | Mehmet Demir | Rocket Avionics System | 2023 Fall | Emre Tel, Ibrahim Eren Burma, Selin Cakiroglu, Ahmet Cevik | ||
| 1219 | Sema Kayhan | DESIGN AND DEVELOPMENT OF A COLOUR SENSING BASED OBJECT SORTING | 2023 Fall | Ahmet Hamdi Balak, Delal Altunok, Ismet Gursoy, Noyfel Bulguoglu | ||
| 1218 | Musa Bute | Improvement on Designing a Biomedical Apparatus for Patient with Broken Leg | 2024 Spring | Ali Akalin, Hazal Nuray Saricabagli, Ibrahim Halil Delioglu, | ||
| 1217 | Musa Bute | Improvement on Position control of Micro DC motor | 2024 Fall | Hamza Fatih Cakmak, Mehmet Ali Unlu, Muhammed Huseyin CaláÝskan, , , | ||
| 1216 | Musa Bute | Improvement on Designing a Biomedical Apparatus for Patient with Broken Arm | 2023 Fall | Mehmet Akif Basbug, Ahmet Hakan Karadana, Muhammet Taner Adiyaman, | ||
| 1215 | Musa Bute | Improvement on Designing a Biomedical Apparatus for Patient with Broken Arm | 2023 Fall | Yigithan Dogangac, Mehmet Goksad Ergul, Suleyman Deger, Muhammed Ikbal Gul | ||
| 1214 | Serkan Özbay | Design of earthquaqe sensing and indicating system | 2023 Fall | Rauf Bora Bataklar, Furkan Yilmaz, Burak Tunahan Topal, Melike Demir | ||
| 1213 | Serkan Özbay | Design of earthquaqe sensing and indicating system | 2023 Fall | Emel Olgar, Mahmut Seyfi Olgar, Hacer Tasci, Yusuf Zeytun | ||
| 1212 | Serkan Özbay | Design of GSM blocking system | 2023 Fall | Refikcan Kartufan, Yusuf Yilmaz, Enes Mert Zor, | ||
| 1211 | Serkan Özbay | Design of GSM blocking system | 2023 Fall | Seyit Ali Ocak, Halil Karademir, Muhammed Bakir, | ||
| 1208 | Ergun Erçelebi | Touch Screen Controlled Robotic Arm | 2024 Spring | Sevim Karsiz, Mehmet Tugrul Koyuncu, Akin Gecili, | ||
| 1206 | Ergun Erçelebi | Development of 5V DC To 80V DC-DC Boost Converter | 2025 Spring | Abdurrahman Hasta, , , | ||
| 1205 | Ergun Erçelebi | Development of 5V DC To 80V DC-DC Boost Converter | 2025 Spring | Lava Hassan, , , | ||
| 1204 | Ergun Erçelebi | Development of a life-saving drone | 2023 Fall | Metin Volkan Dana, Umutcan Balcin, Muhammed Sultan Altintepe, Mustafa Ertas | ||
| 1203 | Ergun Erçelebi | Development of a life-saving drone | 2023 Fall | Alper Safa Celik, Bilal Beyoglu, Adem Gurler, | ||
| 1202 | Arif Nacaroğlu | Design an realization of number location system. | 2024 Fall | Furkan Kogce, , , | ||
| 1201 | Arif Nacaroğlu | Design an realization of number location system. | 2025 Spring | Bekir Can Cucuk, , , | ||
| 1200 | Arif Nacaroğlu | Design an realization of the parallel plate system | 2023 Fall | Serhat Demir, Mesut Imren, Malik Gumus, Mert Karabiyik | ||
| 1199 | Arif Nacaroğlu | Design an realization of the parallel plate system | 2025 Spring | Hatice Betû¥l Dogan, Ecenur OrakláÝ,Bû¥nyamin Polat, Mehmet Fatih Polat, , , | ||
| 1198 | Sema Kayhan | A Tracking system for Alzheimer's Patient | 2024 Spring | Yusuf Mutlu TaparláÝ, Merve Avci, Nuray Tanriover, | ||
| 1197 | Sema Kayhan | A Tracking system for Alzheimer's Patient | 2024 Spring | Furkan Bilbay, Mustafa Unal Altun, Eyup Tingirlioglu, | ||
| 1196 | Sema Kayhan | Smart Locking | 2024 Spring | Abdelrahman Abomosa, , , | ||
| 1195 | Sema Kayhan | Smart Locking | 2024 Spring | Mert Gokmen, , , | ||
| 1194 | Mete Vural | Wearable gas sensor | 2024 Fall | Ahmet á¯mir, , , | ||
| 1193 | Mete Vural | Wearable gas sensor | 2025 Spring | Mikail Seker, , , | ||
| 1192 | Mete Vural | Weight carrying robot | 2023 Fall | Omer Cicek, Samet Yilgin, Ibrahim Suner, | ||
| 1191 | Mete Vural | Weight carrying robot | 2023 Fall | Alparslan Derecik, Aysegul Cetin, Cemal Ucan, | ||
| 1190 | Mete Vural | Electromagnet accelerator | 2023 Fall | Burak Celik, Beyza Daglioglu, Serkan Kolus, Maze Tamay Ercan | ||
| 1189 | Mete Vural | Electromagnet accelerator | 2024 Spring | Ahmet Emre Soysal, Hasan Tikir, Muhammet Ozufacik, | ||
| 1188 | Mahmut Aykaç | Realization Low-Frequency RF Energy Harvester | 2025 Spring | Yousef Odah, , , | ||
| 1186 | Mahmut Aykaç | Real Time Modified Sign Language Recognition | 2023 Fall | Ahmet Aslan, Sibe Elasfur, Muaz Mohammad, | ||
| 1181 | Tolgay Kara | Trash disposal robot | 2023 Fall | Zelal Katbi, Melike Celebi, Nisanur Bayram, | ||
| 1180 | Tolgay Kara | Wearable technologies for disabled people | 2024 Spring | Ahmed Seyh Ali, , , | ||
| 1179 | Tolgay Kara | Wearable technologies for disabled people | 2025 Spring | Muhammed Sait Yakut, , , | ||
| 1178 | Mehmet Demir | Digital twin system of a smart greenhouse | 2023 Fall | Mertcan Demirdas, Caner Zorlu, Mustafa Serhat Kaya, | ||
| 1177 | Mehmet Demir | Digital twin system of a smart greenhouse | 2023 Fall | Ece Cinaroglu, Furkan Erbilgin, Fatih Koca, | ||
| 1175 | Mehmet Demir | Design and implementation of a robotic flying bird with a remote controller | 2024 Spring | Rabia Aslan, Ceren Dilay Tas, Civan Ozel, Fatma Coskun | ||
| 1174 | Nuran Doğru | 3D LED Cube | 2024 Spring | Murat Baltaci, , , | ||
| 1173 | Nuran Doğru | 3D LED Cube | 2024 Fall | Musab Taskesen, , , | ||
| 1171 | Nuran Dogru | Design of high efficienyc class D power amplifier | 2024 Fall | Ali Sakrak, Ilbey AnáÝl Yaman, Abdullah Toygar, , , | ||
| 1169 | Nuran Doğru | Function generator | 2025 Spring | Muhammet Enes Aslan, Alper Safa CELá¯K, Soner Guclu, , , | ||
| 1168 | Nurdal Watsuji | Automatic Open/Close Trash Bin | 2023 Fall | Huzeyfe Soylemez, , , | ||
| 1166 | Nurdal Watsuji | Smart Coffee Table | 2023 Fall | Mustafa Yildiz, Tuba Gozubuyuk, Abbas Ozkurt, | ||
| 1165 | Nurdal Watsuji | Smart Coffee Table | 2023 Fall | Fevzi Yasar Comert, Kadir Oguz, Samet Karasu, | ||
| 1164 | Nurdal Watsuji | Autonomous Fire Fighting Robot | 2023 Fall | Selcuk Oran, Rahmi Gokhan Mazman, Dogukan Kirmizigul, | ||
| 1163 | Nurdal Watsuji | Autonomous Fire Fighting Robot | 2023 Fall | Atilay Yucel, Rohat Inel, Cagri Ceylan, | ||
| 1160 | Seydi Kaçmaz | Motion Detection and Tracking System | 2023 Fall | Gokberk Gokcek, Aytac Ay, Erhan Vergili, Orkun Vedat Yigit | ||
| 1159 | Seydi Kaçmaz | Motion Detection and Tracking System | 2024 Fall | Emre BostancáÝeri,Ugur Demirel,Onur Savas ,Mert Mercan, , , | ||
| 1158 | Taner İnce | Tennis Ball Picker | 2024 Spring | Emin Almuhammed, Ayman Halwani, Malik Eltalip, | ||
| 1156 | Taner İnce | Earthquake Alert System | 2023 Fall | Huseyin Avni Ozcan, , , | ||
| 1154 | Taner İnce | Portable Oscilloscope | 2025 Spring | Mehmet Tuna BolukbasáÝ, , , | ||
| 1153 | Taner İnce | Portable Oscilloscope | 2024 Spring | Melike Zeynep Baglama, , , | ||
| 1152 | Ali Osman Arslan | Development of Flight Control System of Probe Rocket | 2023 Spring | Oguzhan Kandar, , , | ||
| 1151 | Ali Osman Arslan | Development of Flight Control System of Probe Rocket | 2023 Spring | Mehmet Sizer, , , | ||
| 1150 | Uğur Cem Hasar | Design a Polarization Converter Using a Metasurface Structure-1 | 2023 Spring | Unal Cevik, , , | ||
| 1149 | Uğur Cem Hasar | Design a Polarization Converter Using a Metasurface Structure-1 | 2023 Spring | Begum Alagoz, , , | ||
| 1148 | Uğur Cem Hasar | Design a Polarization Converter Using a Metasurface Structure-1 | 2023 Spring | Doga Duman, , , | ||
| 1147 | Uğur Cem Hasar | Design a Polarization Converter Using a Metasurface Structure-1 | 2023 Spring | Gizem Nehir Temel, , , | ||
| 1146 | Mahmut Aykaç | Speech Controlled Turning Signal | 2023 Spring | Veysel Balki, , , | ||
| 1145 | Mahmut Aykaç | Speech Controlled Turning Signal | 2023 Spring | Muhammed Omer Zahter, , , | ||
| 1144 | Serkan Özbay | Design of a microcontroller-based sEMG acquisiton and monitoring system | 2023 Spring | Huseyincan Kucuk, , , | ||
| 1143 | Serkan Özbay | Design of a microcontroller-based sEMG acquisiton and monitoring system | 2023 Spring | Nezar Alali, , , | ||
| 1142 | Nuran Doğru | Egg Cooking Machine | 2023 Spring | Kyaw Min Htet Aung, , , | ||
| 1141 | Nuran Doğru | Egg Cooking Machine | 2023 Spring | Yusuf Attal, , , | ||
| 1140 | Musa Bute | Designing a Biomedical Apparatus for Patient with Broken Leg | 2023 Spring | Hilal Ozguven, , , | ||
| 1139 | Musa Bute | Designing a Biomedical Apparatus for Patient with Broken Leg | 2023 Spring | Ibrahim Taha Lal, , , | ||
| 1138 | Musa Bute | Designing a Biomedical Apparatus for Patient with Broken Arm | 2023 Spring | Mert Ali Akbas, , , | ||
| 1137 | Musa Bute | Designing a Biomedical Apparatus for Patient with Broken Arm | 2023 Spring | Mustafa Enes Berker, , , | ||
| 1136 | Arif Nacaroğlu | 3-D shape identifier | 2023 Spring | Khant Phyo Aung, , , | ||
| 1135 | Mete Vural | Raspberry Pi Pico Based Digital Oscilloscope | 2023 Spring | Muhammet Emin Basar, , , | ||
| 1133 | Serkan Özbay | Microcontroller-based smart chess clock design | 2023 Spring | Sergen Micogullari, , , | ||
| 1132 | Mete Vural | Thyristor based Full-Bridge AC-DC Converter with Arduino | 2023 Spring | Tugrul Kayaci, , , | ||
| 1129 | Tolgay Kara | Using wearable technology for the good of humanity | 2023 Spring | Kifayet Reyyan Yildirim, , , | ||
| 1128 | Ali Osman Arslan | Development of single axis electromagnetic levitation system | 2023 Spring | Mehmet Furkan Bilbay, , , | ||
| 1126 | Ergun Erçelebi | Development of Frequency Counter Circuit | 2023 Spring | Mevlut Alperen Halal, , , | ||
| 1125 | Ergun Erçelebi | Development of contactless Digital Tachometer using MSP430 type microcontroller | 2023 Spring | Mehmet Nuri Sevinc, , , | ||
| 1124 | Tolgay Kara | Wearable technology for better physical health | 2023 Spring | Perihan Berfin Cullanmak, , , | ||
| 1122 | Ergun Erçelebi | Design of Buck-Boost converter | 2022 Fall | Mehmet Fatih Yilmaz, Hakan Akif Goysoy, Nihat Bayram, | ||
| 1121 | Mahmut Aykaç | Coinstar | 2022 Fall | Ceylan Yilmaz, Ceren Tekatli, Sevda Oguz, | ||
| 1120 | Taner İnce | Autonomous robot | 2022 Fall | Ogulcan Ozdemir, Mehmet Sahinli, Mehmet Cinar, Abdulaziz Develioglu | ||
| 1119 | Nurdal Watsuji | Autonomous robotic vehicle | 2022 Fall | Yusuf Taha Dastan, Mehmet Soganci, Abdulselam Demir, Mustafa Ozturkmen | ||
| 1118 | Ali Osman Arslan | Development of avionic system for rocket | 2022 Fall | Halit Kucuk, Semih Ozek, Mehmet Enes Yeniekinci, | ||
| 1117 | Tolgay Kara | Personal Luggage Carrying Robot | 2022 Fall | Burak Ozcanli, Uygar Yilmaz, Emre Can Esmer, | ||
| 1116 | Uğur Cem Hasar | Design a Komi-Robot | 2022 Fall | Mirhat Ozkan, Onur Yeral, Hamit Gurgan, Harun Onat | ||
| 1115 | Savaş Uçkun | Remote Control System | 2022 Fall | Metehan Demir, Mehmet Ali Bagis, Mehmet Gunduz , | ||
| 1114 | Mete Vural | Bluetooth Controlled Electric Crane | 2022 Fall | Ibrahim Kerem Zorer, Hatice Ezgi Turgut, Tunc Kunefeci, | ||
| 1113 | Musa Bute | Designing a Wearable Biomedical Apparatus for patient with drooping eyelid | 2022 Fall | Selahattin Emre Gogebakan, Ali Sarica, Muhammed Etka Yasul, | ||
| 1112 | Musa Bute | Designing a telemetry system using Cansat | 2022 Fall | Ahmed Furkan Gumusbas, Serkan Ozkurt, Tolga Aynali, Hatice Adiguzel | ||
| 1111 | Musa Bute | Native Rov (Remotely Operated underwater Vehicle) pcb Design, Production and Control | 2022 Fall | Abdulkadir Aydemir, Kamil Yildiz, Harun Arslanlar, | ||
| 1108 | Arif Nacaroğlu | 3-D shape identifier | 2022 Fall | Yavuz Burhan Karadayi, , , | ||
| 1107 | Arif Nacaroğlu | 3-D shape identifier | 2023 Spring | Ahmad Alhelali, , , | ||
| 1106 | Arif Nacaroğlu | Holding robot | 2022 Fall | Hakan Gulucar, Abdullah Tarik Ercan, Derya Yildiz, | ||
| 1105 | Arif Nacaroğlu | Holding robot | 2022 Fall | Ahmed Suha Duman, Yusuf Bayarogullari, Muhammed Emin Ceylan, | ||
| 1104 | Mete Vural | Electric crane | 2022 Spring | Abdulbaki Caca, Ali Ayan, Vesile Demirok, Burak Aykan Sariyel | ||
| 1103 | Mete Vural | Electric crane | 2022 Spring | Burak Ahmet Parmaksiz, Murat Gokoglu, Ridvan Burc, Emine Busra Acici | ||
| 1102 | Mete Vural | Raspberry Pi Pico Based Digital Oscilloscope | 2023 Spring | Bahattin Yanik, , , | ||
| 1101 | Mete Vural | DC Power Meter Design | 2022 Fall | Sumeyye Yeprem, , , | ||
| 1099 | Serkan Özbay | Weapon detection system using deep learning on an embedded system for security applications | 2022 Fall | GûÑkhan Cayir, Hasan Huseyin Genc, Can Isildar, Mustafa Sihli Der | ||
| 1098 | Serkan Özbay | Microcontroller-based smart chess clock design | 2022 Fall | Sergen Micoogullari, , , | ||
| 1097 | Serkan Özbay | Microcontroller-based smart chess clock design | 2023 Spring | Seher Turk, , , | ||
| 1096 | Mahmut Aykaç | Real-Time Icy Road Detection | 2022 Spring | Berhan Katipoglu, Ibrahim Sismanoglu, Abdullah Bekir Yanardag, | ||
| 1095 | Mahmut Aykaç | Real-Time Icy Road Detection | 2022 Fall | Ali Bozca, Mehmet Bal, Mehmet Bala, Muhammed Yasin Karakan | ||
| 1092 | Mete Vural | Thyristor based Full-Bridge AC-DC Converter with Arduino | 2022 Fall | Alican Mengene, , , | ||
| 1091 | Mete Vural | Thyristor based Full-Bridge AC-DC Converter with Arduino | 2023 Spring | Esra Ceylan, , , | ||
| 1090 | Mete Vural | Person Detection via Machine Learning | 2022 Spring | Unal Cevik, Ahmet Muhammet Baskaya, Ahmet Bugra Yildirim, Kadir Sefa Ozdemir | ||
| 1089 | Uğur Cem Hasar | Application of Artificial Neural Network for Material Characterization of Materials-2 | 2022 Fall | Kerem Karakoc, , , | ||
| 1088 | Uğur Cem Hasar | Application of Artificial Neural Network for Material Characterization of Materials-1 | 2023 Spring | Samet Karasu, , , | ||
| 1087 | Mete Vural | Person Detection via Machine Learning | 2022 Spring | Ahmet Mert Aksuvek, Hasan Basri Akpolat, Recep Zorlu, Selimhan Erten | ||
| 1084 | Ergun Erçelebi | Development of Class Attendance System Based On Face Recognition Using Raspberry Mini Computer | 2023 Spring | Ammar Abdelrazek, , , | ||
| 1083 | Ergun Erçelebi | Development of Class Attendance System Based On Face Recognition Using Raspberry Mini Computer | 2023 Spring | Fuat Basman, , , | ||
| 1082 | Ergun Erçelebi | Development of Inductive Proximity Sensor | 2023 Spring | Pyae Phyo Kyaw, , , | ||
| 1081 | Ergun Erçelebi | Development of Inductive Proximity Sensor | 2023 Spring | Huseyin Ogul Ozturkmen, , , | ||
| 1080 | Sema Kayhan | Design of Luggage Tracking System | 2022 Fall | Ayse Semina Elci, , , | ||
| 1079 | Sema Kayhan | Design of Luggage Tracking System | 2022 Spring | Ahmed Hossam Moustafa Ahmed Elkassas, , , | ||
| 1078 | Nuran Doğru | Turkish Coffee Machine | 2023 Spring | Ayse Semina Elci, , , | ||
| 1077 | Nuran Doğru | Turkish Coffee Machine | 2023 Spring | Alim Enes Sever, , , | ||
| 1076 | Nuran Doğru | Ultrasonic Therapy Device | 2022 Spring | Kamil Yildiz, Bahattin Yanik, Sergen Micoogullari, | ||
| 1075 | Nuran Doğru | Ultrasonic Therapy Device | 2022 Fall | Mertcan Yilmaz, Berkay Mustu, Berkan Surmeli, | ||
| 1071 | Arif Nacaroğlu | Gap Crossing Autonomous Robot | 2022 Spring | Ibrahim Ek, Huseyin Salih Bayram, Gizem Kaya, | ||
| 1070 | Musa Bute | Cargo Box | 2021 Fall | Ibrahim Halil Yildirim, , , | ||
| 1068 | Ali Osman Arslan | Development of avionic system for rocket | 2022 Fall | Berkay Yalovac, Muhammet Cakici, Onur Anil Bozkurt, Berkcan Ciftci | ||
| 1067 | Ali Osman Arslan | Development of electronic speed controller for brushless dc motor | 2021 Fall | Bahattin Yanik, , , | ||
| 1066 | Ali Osman Arslan | Development of Agricultural unmanned ground vehicle to detect and destroy harmful plant | 2021 Fall | Efe Berkay Serce, Hasan Yildiz, Ahmet Efe, | ||
| 1065 | Taner İnce | Wireless Patient Health Monitoring | 2021 Fall | Burak Uygur, , , | ||
| 1064 | Taner İnce | Fingerprint based money safe | 2021 Fall | Zekeriya Gedik, , , | ||
| 1063 | Ergun Erçelebi | Development of Frequency Counter Circuit | 2021 Fall | Kaan Lo, , , | ||
| 1062 | Musa Bute | Designing a Conventional FM Radio Operating in the range 88 - 108 MHz | 2021 Fall | Abdulsamed Ciftcioglu, , , | ||
| 1060 | Tolgay Kara | Using wearable technology for the good of humanity | 2023 Spring | Sukru Demir, , , | ||
| 1059 | Tolgay Kara | Satellite model with near real-time data transmission and processing | 2021 Fall | Emre Ozkaya, , , | ||
| 1058 | Tolgay Kara | Stair-climbing autonomous rescue robot | 2022 Fall | Isbara Alp Acikgoz, Safak Erken, Gulay Beyda Atli, Zinnur Yildiz | ||
| 1057 | Nurdal Watsuji | Hand gesture recognition based on image processing | 2021 Fall | Abdullah Mucahit Coban, , , | ||
| 1056 | Mehmet Demir | Temperature measuring system using PT100 and STM nucleo board | 2021 Fall | Mehmet Nuri Pekacar, Agit Sevim, Cemal Dirican, | ||
| 1055 | Mete Vural | Bluetooth Controlled Farm Robot | 2021 Fall | Burak Sevik, Mehmet Ercin, Mucahit Sayin, Mehmet Zana Soner | ||
| 1054 | Mete Vural | Inductive Wireless Charger Design | 2021 Fall | Ali Er, , , | ||
| 1053 | Mete Vural | Capacitive Wireless Charger Design | 2021 Fall | Tariq Durrani, , , | ||
| 1052 | Mete Vural | Digital DC wattmeter Design | 2021 Fall | Ibrahim Bilgehan Dumrul, , , | ||
| 1051 | Serkan Özbay | Autonomous room cleaning robot | 2022 Spring | Kubra Ozgur, Merve Hazal Dogru, Fatma Demir, Omer Faruk Kirvar | ||
| 1050 | Serkan Özbay | Design of touchless smart trash bin | 2021 Fall | Furkan Asefler, , , | ||
| 1049 | Serkan Özbay | Hand wash system for the kids | 2021 Fall | Ali Fuat Ucar, , , | ||
| 1048 | Serkan Özbay | Self balancing robot design | 2022 Fall | Ilayda Atalik, Elif Kubra Halacoglu, Melih Muhammed Balta, | ||
| 1047 | Serkan Özbay | Motion Sensing Camera Base Design | 2021 Fall | Deniz Can Ilgin, , , | ||
| 1046 | Uğur Cem Hasar | Design a Microwave Sensor with Flexible Metamaterial Resonators-1 | 2023 Spring | Cemal Ucan, , , | ||
| 1045 | Sema Kayhan | Machine Learning Based Fire Detection System | 2022 Fall | Eyup Yildiz, , , | ||
| 1044 | Sema Kayhan | Smart Fire Detection System I | 2021 Fall | Irem Burcu Aksahin, , , | ||
| 1043 | Sema Kayhan | Smart Floor Car Parking System | 2022 Fall | Selam Can Duru, Meryem Aysenur Uslu, Kevser Korkmaz, | ||
| 1042 | Gölge Öğücü | Solar Panel Cleaner | 2021 Fall | Burak Aykan Sariyel, , , | ||
| 1041 | Gölge Öğücü | Self cleaning room | 2022 Fall | Abdulkadir Bay, Davut Seker, Yigit Celik, | ||
| 1040 | Sema Kayhan | Smart Home Automation | 2021 Fall | Batuhan Karakoca, Kenan Ay, Cuma Gogebakan, | ||
| 1039 | Gölge Öğücü | Lock Operating with Voice | 2021 Fall | Haldun Budak, Ali Bayambudak, Ertugrul Harun Karapinar, Furkan Beyaz | ||
| 1038 | Seydi Kaçmaz | Human Emotion Recognition | 2021 Fall | Ahmad Deari Ahmed, , , | ||
| 1037 | Seydi Kaçmaz | Business Card Scanner | 2021 Fall | Muhammed Ikbal Hokenek, , , | ||
| 1036 | Seydi Kaçmaz | LEGO Brick Sorter | 2022 Fall | Melike BelpáÝnar, Furkan Coskun, Bahri Cilengir, | ||
| 1035 | Seydi Kaçmaz | QR Code-Based Vending Machine, ATM or LIFT | 2022 Spring | Emre Kalyenci, Muhammet Zarur, Mehmet Ilker Akgol, | ||
| 1034 | Taner İnce | Smart Room Temperature Controller | 2021 Fall | Resit Cengel, , , | ||
| 1033 | Taner İnce | Hand motion controlled robotic vehicle | 2021 Fall | Ahmet Bugra Acar, Ali Simsek, Mehmet Akbulut, | ||
| 1032 | Nurdal Watsuji | Signaling system of a four-way junction based on traffic density | 2021 Fall | Eren Yavuz, Ahmet Berat Kaya, Abdulhamit Kocaoglan, | ||
| 1031 | Nurdal Watsuji | TV remote controlled robot | 2021 Fall | Selen Nisa Cinal, Kadir Akil, Melis Basaran, | ||
| 1030 | Arif Nacaroğlu | Recorder of Breathing Pauses | 2021 Fall | Ibrahim Ayata, , , | ||
| 1029 | Mahmut Aykaç | Vintage Digital Photo Album | 2021 Fall | Harun Arslanlar, , , | ||
| 1028 | Mahmut Aykaç | Logic Indicator Probe | 2021 Fall | Mahmut Kaplan, , , | ||
| 1027 | Mahmut Aykaç | Smart Music Player | 2021 Fall | Sultan Busegul Dogan, Bunyamin Can, Berna Gamze Eker, Kaan Mehmet Gokdemir | ||
| 1026 | Nuran Doğru | Toaster design | 2021 Fall | Cemil Yardim, , , | ||
| 1025 | Nuran Doğru | Robotic vehicle design avoiding from obstacles | 2021 Fall | Ali Katuc, , , | ||
| 1024 | Nuran Doğru | Popcorn machine design | 2021 Fall | Alican Mengene, , , | ||
| 1023 | Nuran Doğru | Prototype robot-vacuum cleaner | 2021 Fall | Muslum Yazgan, Muhammet Fatih Sahin, Ozgur Tural, | ||
| 1022 | Musa Bute | Cargo Box | 2021 Fall | Batuhan Ulu, , , | ||
| 1020 | Ali Osman Arslan | Development of single axis electromagnetic levitation system | 2023 Spring | Huzeyfe Soylemez, , , | ||
| 1018 | Gölge Öğücü | 5G Transparent Antenna Design | 2021 Fall | Ahmet Muhammet Baskaya, , , | ||
| 1016 | Ergun Erçelebi | Development of autonomous floor vacuum cleaner robot | 2022 Spring | Mehmet Resit Cengel, Sedat Mizmizlioglu, Kaan Lo, | ||
| 1015 | Ergun Erçelebi | Development of Frequency Counter Circuit | 2023 Spring | Ali Ekrem Yalcin, , , | ||
| 1014 | Ergun Erçelebi | Development of ultrasonic distance and level measurement system using ARM based microcontroller | 2021 Fall | Ali Ayan, , , | ||
| 1013 | Ergun Erçelebi | Development of contactless Digital Tachometer using MSP430 type microcontroller | 2023 Spring | Ibrahim Kozat, , , | ||
| 1012 | Tolgay Kara | Wearable technology for better physical health | 2023 Spring | Ismail Yildirim, , , | ||
| 1011 | Tolgay Kara | Using wearable technology for the good of humanity | 2021 Fall | Oguzhan Engizek, , , | ||
| 1009 | Gölge Öğücü | 5G Transparent Antenna Design | 2023 Spring | Eyup Yildiz, , , | ||
| 1008 | Uğur Cem Hasar | Design a Flexible Microwave Sensor for Detection of Water Adulteration in Honey | 2023 Fall | Agit Kilic, Bekir Furkan Coskun, Mehmet Husrev Cokgezer, Fayat Akinci | ||
| 1007 | Uğur Cem Hasar | An Automated Free-Space Microwave Measurement System Using a MATLAB Graphical-User-Interface Program II | 2022 Spring | Derya Yildiz, Omer Cicek, Ayse Semina Elci, | ||
| 1005 | Sema Kayhan | Controlling an Elevator System with Image Processing | 2022 Fall | Mesut Imren, , , | ||
| 1004 | Seydi Kaçmaz | Virtual Drums | 2021 Fall | Onur Cetinkaya, , , | ||
| 1003 | Taner İnce | X-Y plane precision sketcher | 2021 Fall | Ahmad Kadi, Noh Masri, Ahmad Hazzuri, | ||
| 1001 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2023 Spring | Bilal Beyoglu, , , | ||
| 1000 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2023 Spring | Ali Tarik Ozbey, , , | ||
| 0999 | Nurdal Watsuji | Flower classification using artificial neural network based image processing | 2021 Fall | Muhammed Furkan Ozguven, , , | ||
| 0998 | Arif Nacaroğlu | Design and construction of the OTA-Oscillators | 2021 Fall | Muhammed Fatih Yilmaz, , , | ||
| 0997 | Mahmut Aykaç | Morse to Text and Speech Translator | 2021 Fall | Sahin Tasdemir, , , | ||
| 0996 | Mahmut Aykaç | Save the water, save the world! | 2021 Fall | Mustafa Tintas, Muhammed Ali Demirhan, Mehmet Mustan, | ||
| 0995 | Musa Bute | Cargo Box | 2021 Fall | Sule Nur Turkmen, , , | ||
| 0994 | Musa Bute | AUTONOMOUS DELIVERY ROBOT | 2021 Fall | Berivan Nisa Kaya, Fadil Tac, Halil Yagmur, Muhammet Ali Sihanlioglu | ||
| 0993 | Ali Osman Arslan | Development of avionic system for rocket | 2021 Fall | Mehmet Turemen, Cemil Zeyveli, Omer Yigithan Senvar, | ||
| 0992 | Ali Osman Arslan | Development of single axis electromagnetic levitation system | 2021 Fall | Burak Ahmet Parmaksiz, , , | ||
| 0991 | Ali Osman Arslan | Development of electronic speed controller for brushless dc motor | 2021 Fall | Mehmet Avci, , , | ||
| 0990 | Ali Osman Arslan | Development of avionic system for rocket | 2021 Fall | Tayfur Cinar, Omer Dogan, Mustafa Cem Oflaz, | ||
| 0989 | Ali Osman Arslan | Development of Agricultural unmanned ground vehicle to detect and destroy harmful plant | 2021 Fall | Semanur Borucu, Aylin Serap Bozoglan, Ozlem Kizildeli, | ||
| 0987 | Gölge Öğücü | 5G Transparent Antenna Design | 2023 Spring | Gokhan Cevirici, , , | ||
| 0986 | Taner İnce | Wireless Patient Health Monitoring | 2021 Fall | Eyup Yildiz, , , | ||
| 0985 | Taner İnce | Fingerprint based money safe | 2021 Fall | Bekir Sitki Aydin, , , | ||
| 0984 | Mehmet Demir | Telemetry data and video transmission for a model satellite system | 2021 Fall | Anil Akbas, Furkan Keles, Huseyin Bayir, | ||
| 0983 | Ergun Erçelebi | Development of continuous positive airway pressure ventilator | 2022 Fall | Yakup Uzun, Abdulkadir Acar, Ertugrul Ozcetin, | ||
| 0982 | Ergun Erçelebi | Development of autonomous floor vacuum cleaner robot | 2021 Fall | Resit Kagan Arslan, Ahmet Karayun, Ethem Burak Andi, | ||
| 0981 | Ergun Erçelebi | Development of Frequency Counter Circuit | 2021 Fall | Mustafa Koc, , , | ||
| 0980 | Ergun Erçelebi | Development of ultrasonic distance and level measurement system using ARM based microcontroller | 2021 Fall | Emre Can Kizilates, , , | ||
| 0979 | Ergun Erçelebi | Development of contactless Digital Tachometer using MSP430 type microcontroller | 2021 Fall | Oylum Samsum, , , | ||
| 0978 | Musa Bute | Designing a Conventional FM Radio Operating in the range 88 - 108 MHz | 2021 Fall | Berke Tamucin, , , | ||
| 0977 | Musa Bute | Fire Detection and Extinguishing by UAV (Unmanned Aerial Vehicle) | 2021 Fall | Omer Faruk Paker, Emre Tasar, Kadirhan Unver, | ||
| 0976 | Tolgay Kara | Wearable technology for better physical health | 2021 Fall | Yusuf Mert Polat, , , | ||
| 0975 | Tolgay Kara | Using wearable technology for the good of humanity | 2021 Fall | Ceren Turk, , , | ||
| 0974 | Tolgay Kara | Satellite model with near real-time data transmission and processing | 2021 Fall | Ali Simsek, , , | ||
| 0973 | Tolgay Kara | Amphibious search and rescue robot | 2022 Fall | Burak Uygur, Ibrahim Halil Zorkuscu, Ismail Kizikli, Mehmet Kas | ||
| 0972 | Tolgay Kara | Stair-climbing autonomous rescue robot | 2021 Fall | Musa Yilmaz, Asircan Yavuz, Esat Kok, Can Kankilic | ||
| 0971 | Nurdal Watsuji | Hand gesture recognition based on image processing | 2021 Fall | Eyup Tugrulhan Suna, , , | ||
| 0970 | Mehmet Demir | Temperature measuring system using PT100 and STM nucleo board | 2021 Fall | Bilal Abukan, Fatih Budak, Mehmet Yilmaz Akbiyik, | ||
| 0969 | Mehmet Demir | Unmanned underwater system | 2021 Fall | Ezgi Berfin Avci, Merve Aslan, Emre Can Sonmez, | ||
| 0968 | Mete Vural | Bluetooth Controlled Farm Robot | 2021 Fall | Veysel Can Karaduman, Muhammet Bogmak, Kaan Bulbul, Halil Ibrahim Erdogan | ||
| 0967 | Mete Vural | Inductive Wireless Charger Design | 2021 Fall | Fuat Kayahan Cerihan, , , | ||
| 0966 | Mete Vural | Capacitive Wireless Charger Design | 2021 Fall | Sahin Yasli, , , | ||
| 0965 | Mete Vural | Digital DC wattmeter Design | 2021 Fall | Nese Seray Puli, , , | ||
| 0964 | Serkan Özbay | Autonomous room cleaning robot | 2021 Fall | Huseyin Katircioglugil, Murat Ozcan, Maruf Ozmen, | ||
| 0963 | Serkan Özbay | Design of touchless smart trash bin | 2021 Fall | Ilhan Furkan Kenanoglu, , , | ||
| 0962 | Serkan Özbay | Hand wash system for the kids | 2021 Fall | Alperen Sahin, , , | ||
| 0961 | Serkan Özbay | Self balancing robot design | 2021 Fall | Kagan Dogan, Arif Alan, Meliksah Esen, | ||
| 0960 | Serkan Özbay | Motion Sensing Camera Base Design | 2021 Fall | Halis Topcu, , , | ||
| 0959 | Uğur Cem Hasar | Design a Microwave Sensor with Flexible Metamaterial Resonators-3 | 2021 Fall | Onur Burak Akharman, , , | ||
| 0958 | Uğur Cem Hasar | Design a Microwave Sensor with Flexible Metamaterial Resonators-2 | 2021 Fall | Devrancan Yokus, , , | ||
| 0957 | Uğur Cem Hasar | Design a Microwave Sensor with Flexible Metamaterial Resonators-1 | 2021 Fall | Ramazan Sireci, , , | ||
| 0954 | Sema Kayhan | Machine Learning Based Fire Detection System | 2021 Fall | Yusuf Cemiloglu, , , | ||
| 0953 | Sema Kayhan | Smart Fire Detection System I | 2021 Fall | Kerem Karakoc, , , | ||
| 0952 | Sema Kayhan | Smart Floor Car Parking System | 2021 Fall | Vedat Acar, Onur Arslan, Doguhan Pinar, | ||
| 0951 | Gölge Öğücü | Solar Panel Cleaner | 2021 Fall | Hakan Pampal, , , | ||
| 0950 | Gölge Öğücü | Self cleaning room | 2021 Fall | Umut Can Karaca, Cumhur Melcik, Ugurcan Kasap, | ||
| 0949 | Sema Kayhan | Smart Home Automation | 2021 Fall | Omer Dagli, Onder Arca, Mehmet Can Dincer, | ||
| 0948 | Gölge Öğücü | Lock Operating with Voice | 2021 Fall | Emre Kocaoglanligil, Busra Altuntas, Ayse Nur Dabaniyasti, Enes Yildirim | ||
| 0947 | Sema Kayhan | Controlling an Elevator System with Image Processing | 2022 Spring | Abdulkadir Bay, Adem Gurler, Abdulsamed Cifcioglu, | ||
| 0946 | Seydi Kaçmaz | Virtual Drums | 2021 Fall | Kubra Ozgur, , , | ||
| 0945 | Seydi Kaçmaz | Human Emotion Recognition | 2021 Fall | Ali Yagdiran, , , | ||
| 0944 | Seydi Kaçmaz | Business Card Scanner | 2021 Fall | Ali Dogan, , , | ||
| 0943 | Seydi Kaçmaz | LEGO Brick Sorter | 2021 Fall | Enes Cengiz, Enver Ucar, Dogus Yaldiz, | ||
| 0942 | Seydi Kaçmaz | QR Code-Based Vending Machine, ATM or LIFT | 2021 Fall | Nael Alsaleh, Omar Mohamed, Reaam Almohamad, | ||
| 0941 | Taner İnce | Smart Room Temperature Controller | 2021 Fall | Alper Aldemir, , , | ||
| 0940 | Taner İnce | X-Y plane precision sketcher | 2021 Fall | Bahadir Tacyildiz, Busra Gelmez, Rukiye Yildiz, | ||
| 0939 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2023 Spring | Mesut Imren, , , | ||
| 0938 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2023 Spring | Adem Gurler, , , | ||
| 0937 | Taner İnce | Hand motion controlled robotic vehicle | 2021 Fall | Ahmed Nasr Abbas Shamsan Al-Qershi, Omar Khalid Mosleh Al-Thibany, Omar Saadeldin Saad Ellabban, | ||
| 0936 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2021 Fall | Omer Faruk Kirvar, , , | ||
| 0935 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2022 Fall | Omer Gulengul, Batuhan Erkmen, Ikbal Mustafa Demir, | ||
| 0933 | Nurdal Watsuji | Flower classification using artificial neural network based image processing | 2021 Fall | Latif Bilgin, , , | ||
| 0932 | Nurdal Watsuji | Signaling system of a four-way junction based on traffic density | 2021 Fall | Yusuf Mutlu, Izmir Yilmaz, Fatma Ercan, | ||
| 0931 | Nurdal Watsuji | TV remote controlled robot | 2021 Fall | Batuhan Dogan, Mehmet Ali Donmez, Ali Bayram, | ||
| 0930 | Arif Nacaroğlu | Gap Crossing Autonomous Robot | 2021 Fall | Sultan Kenger, Mehmet Keten, Umit Can Ciddi, | ||
| 0929 | Arif Nacaroğlu | Design and construction of the OTA-Oscillators | 2021 Fall | Numan Ozpinar, , , | ||
| 0928 | Arif Nacaroğlu | Recorder of Breathing Pauses | 2021 Fall | Murat Toluk, , , | ||
| 0927 | Mahmut Aykaç | Vintage Digital Photo Album | 2021 Fall | Seda Nur Arik, , , | ||
| 0926 | Mahmut Aykaç | Morse to Text and Speech Translator | 2021 Fall | Yusuf Enes Tuncay, , , | ||
| 0925 | Mahmut Aykaç | Logic Indicator Probe | 2021 Fall | Suleyman Eren Ersan, , , | ||
| 0924 | Mahmut Aykaç | Smart Music Player | 2021 Fall | Didem Celebi, Melisa Kanisirin, Yagmur Aras, Baran Karahan | ||
| 0923 | Mahmut Aykaç | Save the water, save the world! | 2021 Fall | Erdi Gezer, Damla Ayran, Muhammet Huseyin Aksin, | ||
| 0922 | Nuran Doğru | Toaster design | 2021 Fall | Kadir Sefa Ozdemir, , , | ||
| 0921 | Nuran Doğru | Robotic vehicle design avoiding from obstacles | 2021 Fall | Ahmet Simsek, , , | ||
| 0920 | Nuran Doğru | Popcorn machine design | 2021 Fall | Erdem Mutlu, , , | ||
| 0919 | Nuran Doğru | Prototype robot-vacuum cleaner | 2021 Fall | Fatma Sude Mutluay, Mine Dogru, Ruveyda Kilinc, | ||
| 0918 | Arif Nacaroğlu | Target follower | 2021 Spring | Mohamed Moustafa, , , | ||
| 0917 | Arif Nacaroğlu | Target follower | 2021 Spring | Furkan Yerli, , , | ||
| 0916 | Mete Vural | Luo Converter Design | 2021 Spring | Asaad Arab, , , | ||
| 0914 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2021 Spring | Yusuf Kocak, , , | ||
| 0913 | Taner İnce | Weather reporter | 2021 Spring | Mustafa Ince, , , | ||
| 0912 | Taner İnce | Weather reporter | 2021 Spring | Mehmet Guclu, , , | ||
| 0911 | Taner İnce | Patient Status Device | 2021 Spring | Ferhat Gozegir, , , | ||
| 0910 | Taner İnce | Patient Status Device | 2021 Spring | Muhammet Hasan Kocyigit, , , | ||
| 0909 | Nurdal Watsuji | Computer Vision-Based Text Scanner | 2021 Spring | Berna Gamze Eker, , , | ||
| 0908 | Nurdal Watsuji | Computer Vision-Based Text Scanner | 2021 Spring | Mohamad Al Houssin, , , | ||
| 0907 | Nurdal Watsuji | Bird Species Identification using Matlab | 2021 Spring | Hanim Aslan, , , | ||
| 0906 | Nurdal Watsuji | Bird Species Identification using Matlab | 2021 Spring | Mohamad Afoura, , , | ||
| 0905 | Nurdal Watsuji | Leaf recognition of plants using Matlab | 2021 Spring | Kaan Gok, , , | ||
| 0904 | Nurdal Watsuji | Leaf recognition of plants using Matlab | 2021 Spring | Fatih Gultekin, , , | ||
| 0903 | Arif Nacaroğlu | Hearing aid device | 2021 Spring | Mehmet Gokdogan, , , | ||
| 0902 | Arif Nacaroğlu | Hearing aid device | 2021 Spring | Musa Sevgi, , , | ||
| 0901 | Arif Nacaroğlu | Acoustic Amplifier | 2021 Spring | Alihan Uzdil, , , | ||
| 0900 | Arif Nacaroğlu | Acoustic Amplifier | 2021 Spring | Tasnim Mira Kattan, , , | ||
| 0899 | Gölge Öğücü | Wideband Patch Antenna for Sub-6 GHz 5G systems | 2021 Spring | Kaan Mehmet Gokdemir, , , | ||
| 0898 | Gölge Öğücü | Wideband Patch Antenna for Sub-6 GHz 5G systems | 2021 Spring | Zekeriya Edahil, , , | ||
| 0897 | Taner İnce | Fire and Gas detector | 2021 Spring | Kadir Mutlu, , , | ||
| 0896 | Taner İnce | Fire and Gas detector | 2021 Spring | Yemen Hamedi, , , | ||
| 0895 | Nuran Doğru | Radio Frequency Remote Controlled Wireless Robot | 2021 Spring | Suleyman Sari, , , | ||
| 0894 | Nuran Doğru | Radio Frequency Remote Controlled Wireless Robot | 2021 Spring | Cihan Nazli, , , | ||
| 0893 | Gölge Öğücü | 4x1 Patch Array at 28 GHz for 5G | 2021 Spring | Melike Gundogdu, , , | ||
| 0892 | Gölge Öğücü | 4x1 Patch Array at 28 GHz for 5G | 2021 Spring | Muhammed Mustafa, , , | ||
| 0891 | Gölge Öğücü | 2x2 Patch Array at 28 GHz for 5G | 2021 Spring | Hamid Kheir, , , | ||
| 0890 | Gölge Öğücü | 2x2 Patch Array at 28 GHz for 5G | 2021 Spring | Kemal Dogan, , , | ||
| 0889 | Nuran Doğru | Cell Phone Controlled Robotic Vehicle | 2021 Spring | Batuhan Yigit, , , | ||
| 0888 | Nuran Doğru | Cell Phone Controlled Robotic Vehicle | 2021 Spring | Emine Osman, , , | ||
| 0887 | Nuran Doğru | TV Remote Controlled Robotic Vehicle Project | 2021 Spring | Kemal Dulda, , , | ||
| 0886 | Nuran Doğru | TV Remote Controlled Robotic Vehicle Project | 2021 Spring | Busra Nur Mete, , , | ||
| 0885 | Mete Vural | Brushless DC Motor Design | 2021 Spring | Mert Keles, , , | ||
| 0883 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2021 Spring | Burak Yilmaz, , , | ||
| 0882 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2021 Spring | Sehed Basmaci, , , | ||
| 0881 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2021 Spring | Oguz Kaan Begmisli, , , | ||
| 0880 | Seydi Kaçmaz | Self Balancing Robot | 2021 Spring | Ali Alper Korkmaz, , , | ||
| 0879 | Seydi Kaçmaz | Self Balancing Robot | 2021 Spring | Cagri Inan, , , | ||
| 0878 | Seydi Kaçmaz | Gesture based Robotic Arm | 2021 Spring | Mustafa Taha Tuna, , , | ||
| 0877 | Seydi Kaçmaz | Gesture based Robotic Arm | 2021 Spring | Sevval Nur Erol, , , | ||
| 0876 | Seydi Kaçmaz | Rubik's Cube Solver Robot | 2021 Spring | Derya Karahan, , , | ||
| 0875 | Seydi Kaçmaz | Rubik's Cube Solver Robot | 2021 Spring | Mehmet Fatih Fedai, , , | ||
| 0874 | Mete Vural | Luo Converter Design | 2021 Spring | Fatma Guven, , , | ||
| 0873 | Mete Vural | Luo Converter Design | 2021 Spring | Zeliha Ayhan, , , | ||
| 0872 | Mete Vural | Wireless Power Transfer | 2021 Spring | Huseyin Soyaltin, , , | ||
| 0871 | Mete Vural | Wireless Power Transfer | 2021 Spring | Mustafa Yildiz, , , | ||
| 0870 | Mahmut Aykaç | Spy Bug | 2021 Spring | Miray Coskun, , , | ||
| 0869 | Mahmut Aykaç | Spy Bug | 2021 Spring | Halil Ibrahim Dogan, , , | ||
| 0868 | Sema Kayhan | Microcontrollers Based Product Remaining Shelf Life Estimation | 2021 Spring | Selcuk Ozgul, , , | ||
| 0867 | Sema Kayhan | Microcontrollers Based Product Remaining Shelf Life Estimation | 2021 Spring | Mehmet Batuhan Polat, , , | ||
| 0866 | Sema Kayhan | Portable ECG Monitoring System | 2021 Spring | Arda Ege Toslak, , , | ||
| 0865 | Sema Kayhan | Portable ECG Monitoring System | 2021 Spring | Muhammet Cuma, , , | ||
| 0864 | Sema Kayhan | Intelligent fire detection system | 2021 Spring | Mehmet Korkmaz, , , | ||
| 0863 | Sema Kayhan | Intelligent fire detection system | 2021 Spring | Tamer Kose, , , | ||
| 0862 | Serkan Özbay | Smart Alarm Clock using Hypnagogia Detection | 2021 Spring | Hasan Soykan, , , | ||
| 0861 | Serkan Özbay | Smart Alarm Clock using Hypnagogia Detection | 2021 Spring | Ibrahim Aydemir, , , | ||
| 0860 | Serkan Özbay | Automated Parking Lot Attendant System | 2021 Spring | Onur Aksu, , , | ||
| 0859 | Serkan Özbay | Automated Parking Lot Attendant System | 2021 Spring | Okan Tastepe, , , | ||
| 0858 | Serkan Özbay | Automatic Garage Door System | 2021 Spring | Suleyman Tunc, , , | ||
| 0857 | Serkan Özbay | Automatic Garage Door System | 2021 Spring | Fatih Kabalcioglu, , , | ||
| 0856 | Uğur Cem Hasar | Design a metamaterial sensor using CST-5 | 2021 Spring | Melis Ozeren, , , | ||
| 0855 | Uğur Cem Hasar | Design a metamaterial sensor using CST-5 | 2021 Spring | Khosraw Jan Haibat, , , | ||
| 0854 | Uğur Cem Hasar | Design a metamaterial sensor using CST-4 | 2021 Spring | Servet Kocak, , , | ||
| 0853 | Uğur Cem Hasar | Design a metamaterial sensor using CST-4 | 2021 Spring | Asif Alkaya, , , | ||
| 0852 | Uğur Cem Hasar | Design a metamaterial sensor using CST-3 | 2021 Spring | Veli Bulut Cakmak, , , | ||
| 0851 | Uğur Cem Hasar | Design a metamaterial sensor using CST-3 | 2021 Spring | Nuri Kurtoglu, , , | ||
| 0850 | Tolgay Kara | PID tuning for a liquid level process control problem | 2021 Spring | Salaheddin Banshi, , , | ||
| 0849 | Tolgay Kara | PID tuning for a liquid level process control problem | 2021 Spring | Muhammet Nevfel Ak, , , | ||
| 0848 | Tolgay Kara | Sensor-free solar tracker | 2021 Spring | Osman Guvercin, , , | ||
| 0847 | Tolgay Kara | Sensor-free solar tracker | 2021 Spring | Efe Guzelseme, , , | ||
| 0846 | Musa Bute | Teknofest- International Unmanned Aerial Vehicle Competition | 2021 Spring | Fatih Dagilmis, , , | ||
| 0845 | Musa Bute | Teknofest- International Unmanned Aerial Vehicle Competition | 2021 Spring | Muhammed Alaca, , , | ||
| 0841 | Musa Bute | Teknofest - Swarm Unmanned Aerial Vehicles (Swarm UAV) | 2021 Spring | Mustafa Cabuk, , , | ||
| 0840 | Tolgay Kara | Electronic walking stick for visually impaired people | 2021 Spring | Burak Inan, , , | ||
| 0839 | Tolgay Kara | Electronic walking stick for visually impaired people | 2021 Spring | Hanifi Velet, , , | ||
| 0838 | Ergun Erçelebi | Design an Infrared Thermometer Using msp430 Microcontroller | 2021 Spring | Osman Kutluay Deveci, , , | ||
| 0837 | Ergun Erçelebi | Design an Infrared Thermometer Using msp430 Microcontroller | 2021 Spring | Ali Bozkurt, , , | ||
| 0836 | Ergun Erçelebi | Development of blood pressure measuring device using | 2021 Spring | Umut Kelleci, , , | ||
| 0835 | Ergun Erçelebi | Development of blood pressure measuring device using | 2021 Spring | Metehan Bayar, , , | ||
| 0834 | Ergun Erçelebi | DEVELOPMENT OF PULSE OXIMETER USING MSP430 MICROCONTROLLER | 2021 Spring | Utku Can Aktas, , , | ||
| 0833 | Ergun Erçelebi | DEVELOPMENT OF PULSE OXIMETER USING MSP430 MICROCONTROLLER | 2021 Spring | Eyup Alinak, , , | ||
| 0832 | Mahmut Aykaç | Analog Scaled Smart Home | 2021 Spring | Serkan Can Demirci, , , | ||
| 0831 | Mahmut Aykaç | Analog Scaled Smart Home | 2021 Spring | Umut Basaran, , , | ||
| 0830 | Mahmut Aykaç | Soft Remote Controller | 2021 Spring | Burak Kavci, , , | ||
| 0829 | Mahmut Aykaç | Soft Remote Controller | 2021 Spring | Yigit Kargin, , , | ||
| 0828 | Seydi Kaçmaz | Face Recognition with a Mask | 2020 Fall | Hidayet Temel, , , | ||
| 0827 | Ergun Erçelebi | Development of 5V DC To 48V DC Converter | 2020 Fall | Fawjullah Mahmoodi, , , | ||
| 0826 | Taner İnce | Ultrasonic Radar Project | 2020 Fall | Enes Alp, , , | ||
| 0825 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2020 Fall | Mustafa Cabuk, , , | ||
| 0824 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2020 Fall | Mert Gokburi, , , | ||
| 0823 | Sema Kayhan | A Real Time Object Tracking System | 2020 Fall | Ahmet Uzun, , , | ||
| 0822 | Sema Kayhan | A Real Time Object Tracking System | 2020 Fall | Onur Kaynak, , , | ||
| 0821 | Taner İnce | Health Monitoring System | 2020 Fall | Huseyin Burak Soylemez, , , | ||
| 0820 | Taner İnce | Health Monitoring System | 2020 Fall | Muhammed Hamza Akman, , , | ||
| 0819 | Serkan Özbay | Counting Moving Objects Using Microcontroller | 2020 Fall | Muhammet Cuma, , , | ||
| 0818 | Serkan Özbay | Counting Moving Objects Using Microcontroller | 2020 Fall | Rumeysa Kucuktasdemir, , , | ||
| 0817 | Serkan Özbay | Indoor Air Quality Monitoring and Controller Design | 2020 Fall | Ihsan Narin, , , | ||
| 0816 | Serkan Özbay | Indoor Air Quality Monitoring and Controller Design | 2020 Fall | Melis Karabulut, , , | ||
| 0815 | Serkan Özbay | Noise Cancellation System | 2020 Fall | Mehmet Turhanoglu, , , | ||
| 0814 | Serkan Özbay | Noise Cancellation System | 2020 Fall | Yonca Agcabay, , , | ||
| 0813 | Serkan Özbay | Smart Coffee Machine Pump | 2020 Fall | Nihat Tutar, , , | ||
| 0812 | Serkan Özbay | Smart Coffee Machine Pump | 2020 Fall | Huseyin Can Metin, , , | ||
| 0811 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2020 Fall | Mustafa Caner Akinci, , , | ||
| 0810 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2020 Fall | Merve Nur Gunduz , , , | ||
| 0809 | Tolgay Kara | Motorized model airplane with autonomous flight capability | 2020 Fall | Tugba Kara, , , | ||
| 0808 | Ergun Erçelebi | Detection of objects on the Image using deep learning algorithms | 2020 Fall | Dogan Ozmen, , , | ||
| 0807 | Ergun Erçelebi | Detection of objects on the Image using deep learning algorithms | 2020 Fall | Ahmet Ozdemir, , , | ||
| 0806 | Ergun Erçelebi | Portable ECG device design to monitor heart rate | 2020 Fall | Emre Efendioglu, , , | ||
| 0805 | Ergun Erçelebi | Portable ECG device design to monitor heart rate | 2020 Fall | Muhammed Efe, , , | ||
| 0804 | Ergun Erçelebi | Realization of face recognition system on mini computer using deep learning algorithms | 2020 Fall | Tugay Semih Demirkiran, , , | ||
| 0803 | Ergun Erçelebi | Realization of face recognition system on mini computer using deep learning algorithms | 2020 Fall | Burak Kalay, , , | ||
| 0802 | Ergun Erçelebi | Development of 5V DC To 48V DC Converter | 2020 Fall | Mehmet Kinaci, , , | ||
| 0801 | Ergun Erçelebi | Development of 5V DC To 48V DC Converter | 2020 Fall | Huseyin Gunes, , , | ||
| 0800 | Uğur Cem Hasar | Design a metamaterial sensor using CST-2 | 2020 Fall | Atakan Bal, , , | ||
| 0799 | Uğur Cem Hasar | Design a metamaterial sensor using CST-2 | 2020 Fall | Muhammet Hasan Kocyigit, , , | ||
| 0798 | Uğur Cem Hasar | Design a metamaterial sensor using CST-1 | 2020 Fall | Emrah Yapici, , , | ||
| 0797 | Uğur Cem Hasar | Design a metamaterial sensor using CST-1 | 2020 Fall | Mehmet Kilinc, , , | ||
| 0796 | Uğur Cem Hasar | Design a metamaterial absorber using CST-2 | 2020 Fall | Mehmet Bazi, , , | ||
| 0795 | Uğur Cem Hasar | Design a metamaterial absorber using CST-2 | 2020 Fall | Ali Oruc, , , | ||
| 0794 | Uğur Cem Hasar | Design a metamaterial absorber using CST-1 | 2020 Fall | Muhammet Furkan Boncuk, , , | ||
| 0793 | Uğur Cem Hasar | Design a metamaterial absorber using CST-1 | 2020 Fall | Sirac Karaman, , , | ||
| 0792 | Musa Bute | Coin Counter for the project mentioned in 0785. | 2020 Fall | Sami Guzelkokar, , , | ||
| 0791 | Musa Bute | Coin Counter for the project mentioned in 0785. | 2020 Fall | Onur Eyinacar, , , | ||
| 0790 | Musa Bute | Developing an application for Android or IoS devices for the project mentioned in 0785 for customers. | 2020 Fall | Nedim Sahin, , , | ||
| 0789 | Musa Bute | Developing an application for Android or IoS devices for the project mentioned in 0785 for customers. | 2020 Fall | Abdullah Ak, , , | ||
| 0788 | Musa Bute | Development on Android or IoS programme for the project mentioned in 0785 | 2020 Fall | Gorkem Cetin, , , | ||
| 0787 | Musa Bute | Development on Android or IoS programme for the project mentioned in 0785 | 2020 Fall | Yunus Sevimli, , , | ||
| 0786 | Musa Bute | Smart Storage Box | 2020 Fall | Asena Naciye Cat, , , | ||
| 0785 | Musa Bute | Smart Storage Box | 2020 Fall | Ekrem Atakan Kuloglu, , , | ||
| 0784 | Tolgay Kara | Hands off the shopping cart | 2020 Fall | Zozan Aslan, , , | ||
| 0783 | Tolgay Kara | Hands off the shopping cart | 2020 Fall | Bunyamin Tut, , , | ||
| 0782 | Tolgay Kara | Autonomous mobile robot with self-protective behavior | 2020 Fall | Halil Ibrahim Celik, , , | ||
| 0781 | Tolgay Kara | Autonomous mobile robot with self-protective behavior | 2020 Fall | Abdullah Furkan Yilmaz, , , | ||
| 0780 | Tolgay Kara | Smart face mask with sensors | 2020 Fall | Omer Aker, , , | ||
| 0779 | Tolgay Kara | Smart face mask with sensors | 2020 Fall | Mustafa Karalli, , , | ||
| 0778 | Gölge Öğücü | Antenna at 5 GHz | 2020 Fall | Muhammed Serkan Bozgeyik, , , | ||
| 0777 | Gölge Öğücü | Antenna at 5 GHz | 2020 Fall | Ahmet Semih Akcam, , , | ||
| 0776 | Gölge Öğücü | Antenna at 2.4 GHz | 2020 Fall | Cagri Tunc, , , | ||
| 0775 | Gölge Öğücü | Antenna at 2.4 GHz | 2020 Fall | Firat Kurt, , , | ||
| 0774 | Mete Vural | Home Automation using C# and Arduino with Security Feature | 2020 Fall | Mehmet Fatih Gaser, , , | ||
| 0773 | Mete Vural | Home Automation using C# and Arduino with Security Feature | 2020 Fall | Huseyin Erkmen, , , | ||
| 0772 | Mete Vural | DC-DC Converter Design for Solar Photovoltaic Applications | 2020 Fall | Huru Gul Erdem, , , | ||
| 0771 | Mete Vural | DC-DC Converter Design for Solar Photovoltaic Applications | 2020 Fall | Seyfullah Cinar, , , | ||
| 0770 | Mete Vural | Occupancy Monitoring System for Covid-19 | 2020 Fall | Ibrahim Furkan Kayadelen, , , | ||
| 0769 | Mete Vural | Occupancy Monitoring System for Covid-19 | 2020 Fall | Muhterem Alper Kaplan, , , | ||
| 0768 | Mete Vural | Wireless Battery Charger | 2020 Fall | Ahmet Onur Cakir, , , | ||
| 0767 | Mete Vural | Wireless Battery Charger | 2020 Fall | Osman Nuri Yilmaz, , , | ||
| 0766 | Nuran Doğru | Digital Thermometer | 2020 Fall | Omer Kurt, , , | ||
| 0765 | Nuran Doğru | Digital Thermometer | 2020 Fall | Ibragim Zuuridinov, , , | ||
| 0764 | Nuran Doğru | Sending audio signals with a laser beam | 2020 Fall | Yasin Can Korkmaz, , , | ||
| 0763 | Nuran Doğru | Sending audio signals with a laser beam | 2020 Fall | Mevlut Kalkan, , , | ||
| 0762 | Nuran Doğru | PC to PC fiber optic communication | 2020 Fall | Bahtiyar Kalayci, , , | ||
| 0761 | Nuran Doğru | PC to PC fiber optic communication | 2020 Fall | Umut Sunar, , , | ||
| 0760 | Nuran Doğru | PC to PC laser communication | 2020 Fall | Ali Kazim Ural, , , | ||
| 0759 | Nuran Doğru | PC to PC laser communication | 2020 Fall | Muhammet Cahit Albay, , , | ||
| 0758 | Gölge Öğücü | Antenna for 5G system | 2020 Fall | Halil Cuma, , , | ||
| 0757 | Gölge Öğücü | Antenna for 5G system | 2020 Fall | Baris Emre Yalcin, , , | ||
| 0756 | Mahmut Aykaç | RF Energy Harvesting-2 | 2020 Fall | Berfin Insan, , , | ||
| 0755 | Mahmut Aykaç | RF Energy Harvesting-2 | 2020 Fall | Meryem Bayrak, , , | ||
| 0754 | Sema Kayhan | Health Monitoring of Patient using GSM | 2020 Fall | Furkan Dincoguz, , , | ||
| 0753 | Sema Kayhan | Health Monitoring of Patient using GSM | 2020 Fall | Burak Iyikesici, , , | ||
| 0752 | Sema Kayhan | Automatic Car Parking System | 2020 Fall | Mehmet Alpay Sadol, , , | ||
| 0751 | Sema Kayhan | Automatic Car Parking System | 2020 Fall | Ali Tasdogan, , , | ||
| 0750 | Gölge Öğücü | A robot going towards a sound source | 2020 Fall | Emre Arsanaci, , , | ||
| 0749 | Gölge Öğücü | A robot going towards a sound source | 2020 Fall | Enes Bedevi, , , | ||
| 0748 | Sema Kayhan | Intelligent Home System-Control | 2020 Fall | Ali Can Demirel, , , | ||
| 0747 | Sema Kayhan | Intelligent Home System-Control | 2020 Fall | Mehmet Sah Sekerci, , , | ||
| 0745 | Seydi Kaçmaz | COVID 19 - Temperature Screening | 2020 Fall | Mehmet Salih Gumus, , , | ||
| 0744 | Seydi Kaçmaz | Noncontact Pulse Oximetry | 2020 Fall | Aysegul Arslan, , , | ||
| 0743 | Seydi Kaçmaz | Noncontact Pulse Oximetry | 2020 Fall | Cansel Comertpay, , , | ||
| 0742 | Seydi Kaçmaz | COVID 19 - Safe Environment Inspector | 2020 Fall | Ali Deliosman, , , | ||
| 0741 | Seydi Kaçmaz | COVID 19 - Safe Environment Inspector | 2020 Fall | Ugur Karagoz, , , | ||
| 0740 | Seydi Kaçmaz | Face Recognition with a Mask | 2020 Fall | Omar Alabiad, , , | ||
| 0739 | Seydi Kaçmaz | Face Recognition with a Mask | 2020 Fall | Merve Demir, , , | ||
| 0738 | Nurdal Watsuji | Vending finite state machine using Verilog HDL | 2020 Fall | Ramazan Gokturk, , , | ||
| 0737 | Nurdal Watsuji | Vending finite state machine using Verilog HDL | 2020 Fall | Cengizhan Coban, , , | ||
| 0736 | Nurdal Watsuji | Caricaturing a portrait image | 2020 Fall | Burak Kurkun, , , | ||
| 0735 | Nurdal Watsuji | Caricaturing a portrait image | 2020 Fall | Irem Emin, , , | ||
| 0734 | Nurdal Watsuji | Eye detection in still images | 2020 Fall | Baver Ergen, , , | ||
| 0733 | Nurdal Watsuji | Eye detection in still images | 2020 Fall | Burcu Ercisli, , , | ||
| 0732 | Nurdal Watsuji | Character detection in still images | 2020 Fall | Seda Cingoz, , , | ||
| 0731 | Nurdal Watsuji | Character detection in still images | 2020 Fall | Hayriye Arslan, , , | ||
| 0730 | Mahmut Aykaç | Touch Screen Controlled Smart Home System | 2020 Fall | Ali Ihsan Cengiz, , , | ||
| 0729 | Mahmut Aykaç | Touch Screen Controlled Smart Home System | 2020 Fall | Yusuf Orum, , , | ||
| 0728 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2020 Fall | Mouhammad Alali, , , | ||
| 0727 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2020 Fall | Busra Akbas, , , | ||
| 0726 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2020 Fall | Mehmet Ali Ceylan, , , | ||
| 0725 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2020 Fall | Gokhan Ilhan, , , | ||
| 0724 | Taner İnce | Automatic car wiper | 2020 Fall | Akin Kosker, , , | ||
| 0723 | Taner İnce | Automatic car wiper | 2020 Fall | Irmak Gokalp, , , | ||
| 0722 | Taner İnce | Temperature and humidity recorder | 2020 Fall | Hazal Dag, , , | ||
| 0721 | Taner İnce | Temperature and humidity recorder | 2020 Fall | Sena Soylu, , , | ||
| 0720 | Taner İnce | Fingerprint based authentication system for door locks | 2020 Fall | Muhammed Selim Talay, , , | ||
| 0719 | Taner İnce | Fingerprint based authentication system for door locks | 2020 Fall | Nazife Tug, , , | ||
| 0718 | Mahmut Aykaç | Smart Cooling Device for Electronic Circuits | 2020 Fall | Ali Turanbayburt, , , | ||
| 0717 | Mahmut Aykaç | Smart Cooling Device for Electronic Circuits | 2020 Fall | Rehce Diken, , , | ||
| 0716 | Tolgay Kara | Paper airplane with autonomous flight capability | 2020 Fall | Zekiye Orhan, , , | ||
| 0715 | Tolgay Kara | Paper airplane with autonomous flight capability | 2020 Fall | Erkan Sahin, , , | ||
| 0714 | Arif Nacaroğlu | Number puzzle | 2020 Fall | Muhammet Emin Kilincoglu, , , | ||
| 0713 | Arif Nacaroğlu | Number puzzle | 2020 Fall | Efgan Bozoglu, , , | ||
| 0712 | Arif Nacaroğlu | Design and construction of the volume controllable hearing aid device | 2020 Fall | Nazan Ulusoy, , , | ||
| 0711 | Arif Nacaroğlu | Design and construction of the volume controllable hearing aid device | 2020 Fall | Rahime Selbi, , , | ||
| 0710 | Arif Nacaroğlu | The speech content converter by word replacement | 2020 Fall | Ahmet Bostanciklioglu, , , | ||
| 0709 | Arif Nacaroğlu | The speech content converter by word replacement | 2020 Fall | Senem Gokpinar, , , | ||
| 0708 | Arif Nacaroğlu | Encryption and decoding of the word text | 2020 Fall | Ahmet Serhat Sadi, , , | ||
| 0707 | Arif Nacaroğlu | Encryption and decoding of the word text | 2020 Fall | Yusuf Vakkasoglu, , , | ||
| 0706 | Mahmut Aykaç | Thermometer | 2020 Fall | Yusuf Savin, , , | ||
| 0705 | Mahmut Aykaç | Thermometer | 2020 Fall | Huseyin Burak Emre, , , | ||
| 0702 | Tolgay Kara | An autonomic robot | 2020 Spring | Mehmet Soyturk, Nuri Yemez, Mehmet Kara, Nihal Turgut | ||
| 0701 | Uğur Cem Hasar | TEKNOFAST SMART TRANSPORTATION COMPETITION - Artificial Garbage Base Transportation System | 2020 Spring | Bayram Aydede, Fatma Yildiz, Fatma Kizilirmak Korkmaz, Badel Cayli | ||
| 0700 | Mete Vural | Permanent Magnet Synchronous Motor | 2020 Spring | Muhammed Aslan, Cengiz Isci, Ali Baran Ozpolat, | ||
| 0699 | Musa Bute | TEKNOFEST now @Gaziantep # Model Satellite Competition II | 2020 Spring | Burak Tutucu, Ahmet Ayberk Karahasanoglu, Mahmut Arslan, Veli Aslanoglu | ||
| 0698 | Serkan Özbay | Fingerprint voting system | 2020 Spring | Ali Gocmen, Mehmet Kandamar, Berk Deger, | ||
| 0697 | Serkan Özbay | Parser Robotic Arm | 2020 Spring | Sule Soyubelli, Cem Yuceer, Muhammed Yusuf Saglam, | ||
| 0696 | Mahmut Aykaç | The Educational Arduino Set | 2020 Spring | Dalal Saidi, Mohamed Alhazouri, Feyiz Elisa, | ||
| 0695 | Musa Bute | Rewarding (or Punishing) The Speed Levels In Urban City Centres (TEKNOFEST, SMART TRANSPORTATION COMPETITION) | 2020 Spring | Aydin Boz, Aykut Zafer Ozel, Yusuf Dundar, | ||
| 0694 | Musa Bute | Non-Invasive (Contactless) Blood Sugar Level Measurement (TEKNOFEST,TECHNOLOGY FOR HUMANITY) | 2020 Spring | Mehmet Dabakoglu, Bedia Kaya, Ahmet Ozbaytemur, Yusuf Bagriyanik | ||
| 0693 | Mahmut Aykaç | RF Energy Harvester | 2020 Spring | Serhat Guler, Serhat Aktas, Mustafa Kirikci, | ||
| 0691 | Uğur Cem Hasar | Soil Property Measurement by a Drone System | 2020 Spring | Dogan Samsa, Enes Malik Agca, Aziz Murat Pektas, Mehmet Aytekin | ||
| 0690 | Uğur Cem Hasar | Telemetry and Imaging System | 2020 Spring | Ibrahim Ince, Omer Faruk Suslu, Halit Bay, Ali Gozkiran | ||
| 0689 | Sema Kayhan | Object Sorting by Robotic Arm Using Image Processing | 2020 Spring | Ceren Cakir, Sema Nur Demir, Betul Dundar, | ||
| 0688 | Musa Bute | Suit Up With Virtual Room for Online Shopping | 2020 Spring | Batuhan Ekren, Dilara Kilinc, Furkan Ceker, Deniz Selvitopu | ||
| 0687 | Uğur Cem Hasar | Autonomous Taxi Development Project | 2020 Spring | Yunus Emre Gokcek, Merve Nur Demir, Mucahit Fatih Erkmen, | ||
| 0686 | Musa Bute | TEKNOFEST now @Gaziantep # Model Satellite Competition I | 2020 Spring | Nurgul Ibili, Suvba Kablander, Emine Busra Acici, Muharrem Tuttokmagi | ||
| 0685 | Tolgay Kara | Cartesian robot with replaceable sensor probes and 3D position control | 2020 Spring | Cem Gokalp, Mahmoud Aljabal Alkurdy, Yaman Afoura, Kubilay Aytac Deniz | ||
| 0683 | Sema Kayhan | Smart Greenhouse | 2020 Spring | Emir Elhafiz, Anas Osman, Ismail Haj Osman, | ||
| 0682 | Uğur Cem Hasar | Wireless Rear-View Camera System | 2019 Fall | Oguzhan Dogan, Ramazan Altan Turksever, Ali Tomak, | ||
| 0681 | Uğur Cem Hasar | Design a Vivaldi Antenna for Broadband Measurements | 2019 Fall | Kubra Cakir, Emine Elif Pekduru, Erman Sert, | ||
| 0680 | Serkan Özbay | Remote Smart Locking System by Speech Recognition | 2019 Fall | Yunus Emre Ceylan, Mustafa Aslan, Cihan Ayhan, Melih Can Tokus | ||
| 0679 | Serkan Özbay | Remote Smart Locking System by Face Recognition | 2019 Fall | Ali Seza Acar, Seyfettin Yuzugulec, Seyma Tuzun, Mustafa Abali | ||
| 0678 | Nuran Doğru | Autonomous Rover with LIDAR Sensor | 2019 Fall | Ibrahim Bozdal, Metin Acar, Erhan Bulucu, Mucahit Deder | ||
| 0677 | Taner İnce | Robot-taxi | 2019 Fall | Tugce Bayri, Shamsudeen Muhammad Rabiu, Biram Bawo, | ||
| 0676 | Tolgay Kara | Plate and fan control system | 2019 Fall | Ahmet Furkan Kavakli, Anil Seyit Kaya, Ruya Coskun, Rahmi Mert Tosun | ||
| 0675 | Tolgay Kara | Wearable guide for the visually impaired | 2019 Fall | Emine Kaya, Eda Seyma Guler, Tural Abdullayev, | ||
| 0674 | Mahmut Aykaç | Following Distance Detector | 2019 Fall | Ibrahim Sunger, Kadir Aykut, Deniz Karakas, | ||
| 0673 | Mahmut Aykaç | Smart Glove for Sign Translation | 2019 Fall | Merve Nur Koska, Selen Nur Ayhan, Fatma Zehra Kardas, | ||
| 0672 | Ergun Erçelebi | Development of Brushless DC Motor Driver | 2019 Fall | Omer Sari, Huseyin Can, Melike Doner, | ||
| 0671 | Sema Kayhan | Guiding System for Blind People | 2019 Fall | Can Demirhan, Mustafa Furkan Kalkan, Baris Kulluk, | ||
| 0670 | Nuran Doğru | Heart Attact Detection System | 2019 Fall | Sururi Can Kus, Fehmi Gokce, Ali Hayirdiler, | ||
| 0669 | Taner İnce | Visual Object Recognition for People having Visual Impairment | 2019 Fall | Arda Unal, Halil Ibrahim Simsek, Huseyin Kilic, Metehan Kozan | ||
| 0668 | Musa Bute | DESIGN A WEATHER STATION FOR UNIVERSITY CAMPUSES | 2019 Fall | Ali Doganay, Imam Eyyup Elci, Burak Gokkaya, Muhammed Mayan | ||
| 0667 | Musa Bute | DESIGN A TAXIMETER FOR DRONE TAXI SERVICES | 2019 Fall | Refahaddin Erbek, Volkan Doner, Mehmet Kerem Gungor, | ||
| 0666 | Mete Vural | Thyristor-controlled rectifier fed from three-phase source | 2019 Fall | Mustafa Oztunc, Burak Ozer, Hanife Caliskan, | ||
| 0665 | Ergun Erçelebi | Development of Scientific Calculator | 2020 Spring | Ihsan Tumay, Mehmet Erkmen, Asel Ozyurek, | ||
| 0664 | Ergun Erçelebi | Development of Digital multimeter using microcontroller | 2019 Fall | Muslum Samsum, Ali Eroglu, Abdullah Gunduz, Ismail Reyhani | ||
| 0663 | Ergun Erçelebi | Converting manual wheelchair to electric powered trike | 2020 Spring | Tugba Kucukturkmen, Sumeyye Emre, Omer Ozdemir, | ||
| 0662 | Ergun Erçelebi | Development of autonomous car | 2019 Fall | Halil Ibrahim Soker, Serdar Sevimli, Umit Kurtoglu, | ||
| 0661 | Ergun Erçelebi | DEVELOPMENT OF AUTONOMOUS QUADCOPTER | 2019 Fall | Alperen Utma, Furkan Uluocak, Osman Ozev, | ||
| 0660 | Nurdal Watsuji | Autonomous self parking car | 2019 Fall | Atakan Bahadir, Ibrahim Tas, Ugur Gunes, | ||
| 0659 | Seydi Kaçmaz | 4WD Omnidirectional Wheeled Autonomous Car controlled by remote GPS data | 2019 Fall | Emre Bayraktar, Mehmet Akdis, Yusuf Circir, | ||
| 0658 | Seydi Kaçmaz | Portable Night Vision Camera | 2020 Spring | Fatma Kubra Ozdemir, Uday Ciplak, Nurettin Emre Alkan, | ||
| 0657 | Uğur Cem Hasar | Traffic Sign Detection System | 2020 Spring | Emrullah Demir, Huseyin Gunes, Sidika Merve Yaroglu, | ||
| 0655 | Arif Nacaroğlu | Goal Keeper | 2019 Fall | Selin Kayhan, Ali Tas, Burak Yildirim, | ||
| 0654 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2019 Spring | Muslum Kaya, Mehmet Kilic, Okan Parlak, Osman Koksal | ||
| 0653 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2019 Spring | Yunus Emre Arslan, Hakan Erkengel, Hilal Yildiz, | ||
| 0652 | Tolgay Kara | Development of Balancing System with Arduino | 2019 Spring | Hasan Karaoglan, Ali Hazar, Emsal Korkmaz , | ||
| 0651 | Taner İnce | TV remote controlled garbage cleaning robot | 2019 Spring | Muhammed Ali Kanadli, Ibrahim Halil Boran, Asman Ibraimov, | ||
| 0650 | Mahmut Aykaç | Organize Collecting Bags at Airports | 2019 Spring | Amro Mansour, Ahmed Muhammed Serif, Mohamad Moaz Mosto , | ||
| 0649 | Tolgay Kara | Autonomous Rescue Robot | 2019 Spring | Namik Kemal Gungor, Ensar Mujdeci, Ibrahim Batuhan Yurekli, Batuhan Muslu | ||
| 0648 | Mahmut Aykaç | A Portable Retro Game Console Based on Microcontroller | 2019 Fall | Derya Merve Yildiz, Mustafa Aksoy, Seda Beyaz, | ||
| 0647 | Ergun Erçelebi | DEVELOPMENT OF ELECTRONIC CONTINUATION CHART BASED ON FACE RECOGNITION | 2019 Spring | Emrah Uzdilli, Furkan Kadir Kaygusuz, Salman Burak Yesilbag, | ||
| 0646 | Ergun Erçelebi | DEVELOPMENT OF EMBEDDED SYSTEM FOR SMART HOME | 2019 Spring | Halil Devecioglu, Muhammet Ali Akar, Yusuf Erol, | ||
| 0645 | Ergun Erçelebi | DEVELOPMENT OF H-BRIDGE INVERTER FOR CONTROLLING SPEED OF SINGLE PHASE INDUCTION MOTORS | 2019 Fall | Mervan Babat, Halil Ibrahim Ileri, Mehmet Salih Acar, | ||
| 0644 | Mete Vural | Single-Phase Smart Energy Meter | 2019 Spring | Nurbanu Sevindi, Soysal Muhammet Samsum, Emre Isildak, Mehmet Arda Sahin | ||
| 0643 | Mahmut Aykaç | Microcontroller-based Music Player | 2019 Spring | Ahmet Alkan GokpáÝnar, Resul AydáÝn, Nazire Eylem Yucel, | ||
| 0642 | Seydi Kaçmaz | Automated Chess Piece Mover | 2019 Spring | Tolga Balatlioglu, Raafat Aziza, Moustafa Idris, | ||
| 0641 | Seydi Kaçmaz | Electronic Chessboard Set | 2020 Spring | Umut Polat, Muhammed Said Tunc, Daghan Dalli, | ||
| 0640 | Nurdal Watsuji | WSN-IoT Network For Monitoring Soil Properties | 2018 Fall | Basel Faraj, Dicle Durak, Burak Karakoyunlu , | ||
| 0639 | Nuran Doğru | CNC PCB PLOTTER | 2018 Fall | Mustafa Ozkaya, Ali Subasi, Ahmet Afsin, Mustafa Kaya | ||
| 0638 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2018 Fall | Beyza Ozturk, Yunus Ors, Hamza Sevim, | ||
| 0637 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2018 Fall | Haci Devrim Tokkatli, Gizem Nur Buzkan, Mert Metin, | ||
| 0636 | Gölge Öğücü | Safe Squating | 2019 Fall | Emre Cagri Sabanci, Sinan Kepik Dal, Eyup Or, | ||
| 0635 | Gölge Öğücü | Robotic Waiter | 2018 Fall | Taha a Kilinc, Enes Doganoglu, Oguzhan Nedim Kaya, | ||
| 0634 | Gölge Öğücü | Whiteboard Erasing Robot | 2018 Fall | Hasan Dagdelen, Ayse Cakir, Yekbun Gun, | ||
| 0633 | Mete Vural | Five-level single-phase cascaded H-bridge inverter design | 2018 Fall | Muhammed Mucahit Boz, Mert Kalinli, Abdulkadir Cellik, | ||
| 0632 | Mete Vural | Three-level single-phase flying capacitors inverter design | 2018 Fall | Cem Boynuegri, Furkan Birkan, Cuma Can Ihtiyat, | ||
| 0631 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2018 Fall | Busra Celik, Cansu Soysuren, Sinem Nursel Cologlu, | ||
| 0630 | Serkan Özbay | Implementation of Secure Data Communication (encryption/decryption) | 2018 Fall | Enes Gocer, Tugrul Eryilmaz, Gulcan Tikiz, | ||
| 0629 | Mete Vural | Three-level single-phase neutral point clamped inverter design for a 50W | 2018 Fall | Yavuz Selim Doguer, Omer Polat, Burhan KanadáÝkáÝráÝk, | ||
| 0628 | Serkan Özbay | Self-Driving Car with Neural Network | 2018 Fall | Selim Akbudak, Fikret Yildirim, Zarif Ahamed, Elif Sogutcu | ||
| 0627 | Ergun Erçelebi | Development of AC Motor Driver Circuit | 2018 Fall | Gamze Dogan, Mustafa Ceviz, Soner Yilan, | ||
| 0626 | Ergun Erçelebi | Development of Autonomous Quadcopter | 2018 Fall | Dilan Mut, Erkan Dinler, Mustafa Tasdemir, Mustafa Mercan | ||
| 0625 | Ergun Erçelebi | Development of home security system based on face recognition | 2018 Fall | Mehmet Ali Sahin, Feridun Emre, Caner Maden, | ||
| 0624 | Ergun Erçelebi | Development of Driverless Car | 2018 Fall | Mahmet Ali Colak, Tolga Bulut, Ali Bilici, | ||
| 0623 | Ergun Erçelebi | Implementation of an Automated Irrigation System powered by solar energy | 2018 Fall | Onur Coban, Devrim Cetinkaya, Ersel Arslan, | ||
| 0622 | Taner İnce | Garbage cleaning robot | 2018 Fall | Ilkay Alibekiroglu, Semsettin Ocak, Abdullah Karaoglan, | ||
| 0621 | Taner İnce | Voice controlled object collecting robotic vehicle | 2018 Fall | Ahmet Said Dedeoglu, Furkan Karaoglu, Furkan Melih Efe, | ||
| 0620 | Arif Nacaroğlu | Shape Hunter | 2018 Fall | Koray Tas, Utku Cekmegul, Emre Aksakal, | ||
| 0619 | Arif Nacaroğlu | Music Notes Shifter | 2019 Fall | Mehmet Dag, Mehmet Kilic, Eyup Yalavuz, Mustafa Sinan Surucu | ||
| 0618 | Nuran Doğru | Four Axis Controllable Electromagnetic Accelerator With Radar System | 2018 Fall | Melih Cakirtas, Huseyin Serhat Ozturk, Seyda Akdogan, | ||
| 0617 | Serkan Özbay | Design and Construction of Secure Automated Storage System | 2018 Fall | Suleyman Furkan Ayhan, Mehmet Akif Ozkaya, Huseyin Yilmaz, | ||
| 0616 | Uğur Cem Hasar | Design and Construction of a Magnetic Levitation Train | 2018 Fall | Yakup Adiyan, Burak Yarisanozer, Erkan Baykal, Ahmet Topbasli | ||
| 0615 | Arif Nacaroğlu | Design and Different Implementations of 3D printers | 2018 Fall | Yusuf Demir, Kubilay Kerti, Mustafa Unal, Zeynep Sulhan | ||
| 0614 | Tolgay Kara | A small and lighweight fixed-wing UAV with autonomous VTOL flight | 2018 Fall | Berk Topcuoglu, Mehmet Burak Tursun, Isa Nezih Sayilirbas, | ||
| 0613 | Tolgay Kara | Position control of a 2 DOF gantry crane | 2018 Fall | Burhan Baksi, Gulseren Genc, Bengu Keskin, | ||
| 0612 | Tolgay Kara | Agricultural robot for harvesting red vegetables | 2018 Fall | Mehmet Aslan, Mirza Mehmet Yucel, Saban Kocak, Tugay Kati | ||
| 0611 | Nurdal Watsuji | Street Light that Glows on Detecting Vehicle | 2018 Fall | Ibrahim Demir, Mahir Mustafa Ato, Ceylan Yildiz, | ||
| 0610 | Nurdal Watsuji | Portable oscilloscope based on Arduino - A | 2018 Spring | Kemal Celebi, , , | ||
| 0609 | Ergun Erçelebi | Development of Metal Detect Robot | 2018 Spring | Koray Arikan, Gul Beste Han Al, , | ||
| 0608 | Ergun Erçelebi | Development of Buck and Boost Converter with microcontroller | 2018 Spring | Ali Erden, , , | ||
| 0607 | Gölge Öğücü | IoT Home Automation | 2018 Spring | Emirhan Coban, Tolga Deniz, , | ||
| 0606 | Savaş Uçkun | Design and Construction by Using RFID - B | 2018 Spring | Burhan Ates, Tufan Bulut, , | ||
| 0605 | Gölge Öğücü | Indoors Navigation For Visually Impaired People | 2018 Spring | Abdulmalik A. Madigawa, Sami Alhelali, , | ||
| 0604 | Arif Nacaroğlu | Fake money detector | 2018 Spring | Volkan Yilmaz, Muhammet Sait Erdogan, , | ||
| 0603 | Nurdal Watsuji | Portable oscilloscope based on Arduino - B | 2018 Spring | Ceren Mete, , , | ||
| 0601 | Uğur Cem Hasar | Pick and Place with a 3-Axis Robot | 2018 Spring | Rabia Gunay, Zeynep Kurban, , | ||
| 0600 | Uğur Cem Hasar | Electronic Differential for Electric Cars | 2018 Fall | Murat Yildiz, Erman Odem, Oguz Arslan, Adnan Zulkadir | ||
| 0599 | Uğur Cem Hasar | Smart Phone Controlled Scouting Vehicle | 2018 Spring | Silan Yuzgec, Khin Maung Thein, , | ||
| 0598 | Savaş Uçkun | Design and Construction by Using RFID - A | 2018 Spring | Talha Tuzcu, , , | ||
| 0597 | Mete Vural | Two-level Three-phase PWM Inverter Design | 2018 Spring | Lubade Muserref Temel, , , | ||
| 0596 | Tolgay Kara | Energy harvesting by sun tracking solar panel | 2018 Spring | Serdar Demirci, Nuri Erdogdu, , | ||
| 0595 | Tolgay Kara | Automatic humidity-temperature control in a greenhouse | 2018 Spring | Hakki Degirmenci, Hasan Ali Cetinel, Muhammet Harun Baskaya, | ||
| 0594 | Mete Vural | Boost DC/DC Converter Design | 2018 Spring | Emin Sen, Orhan Sirma, , | ||
| 0593 | Sema Kayhan | Real-Time Detection and Tracking of Moving Targets with Color Components - 3 | 2017 Fall | Firat Yildirim, , , | ||
| 0592 | Serkan Özbay | Design and construction of automatic orange juice extractor machine - 2 | 2017 Fall | Mehmet Fatih Kan, Anil Kirikkaya, Gokberk Otlu, | ||
| 0591 | Serkan Özbay | Design and construction of automatic orange juice extractor machine - 1 | 2017 Fall | Ahmet Tunc, Berkay Yalcin, Fatih Yilmazer, | ||
| 0590 | Sema Kayhan | Remote Control Car with Camera - 2 | 2017 Fall | Berke Salim Oldac, Baris Celik, , | ||
| 0589 | Sema Kayhan | Remote Control Car with Camera - 1 | 2017 Fall | Sule Boz, Merve Kilincoglu, , | ||
| 0588 | Sema Kayhan | Real-Time Detection and Tracking of Moving Targets with Color Components - 2 | 2017 Fall | Burak Akhanca, , , | ||
| 0587 | Sema Kayhan | Real-Time Detection and Tracking of Moving Targets with Color Components - 1 | 2017 Fall | Fatma Sude Balcik, , , | ||
| 0586 | Savaş Uçkun | VISUAL IMPAIRMENT AID FOR BLIND WITH NAVIGATION SYSTEM | 2017 Fall | Pyayt Phyo Aung, Baris Can Kablan, Can Boran Puskulluoglu, | ||
| 0585 | Mete Vural | Design of a 1.5 kV Cockroft-Walton Generator - 3 | 2017 Fall | Berna Guven, , , | ||
| 0584 | Serkan Özbay | Solar powered full-automated plant watering system | 2017 Fall | Ayoob Rafea Waleed, Saddirbek Saliev, , | ||
| 0583 | Mete Vural | Design of a 1 kV Cockroft-Walton Generator - 2 | 2017 Fall | Hasan Basri Alemdar, Sefa Aslan, , | ||
| 0582 | Mete Vural | Design of a 1 kV Cockroft-Walton Generator - 1 | 2017 Fall | Gamze Okay, Tugce Cimendag, , | ||
| 0581 | Taner İnce | Autonomous robotic vehicle - 2 | 2017 Fall | Alper Dogan, Mehmet Balci, , | ||
| 0580 | Taner İnce | Autonomous robotic vehicle - 1 | 2017 Fall | Ebubekir Koca, Fatih Okan Marangoz, , | ||
| 0579 | Taner İnce | Design of a Vending Machine - 2 | 2017 Fall | Emre Simsek, Mehmet Perisan, Ibrahim Yaramisli, | ||
| 0578 | Taner İnce | Design of a Vending Machine - 1 | 2017 Fall | Vedat Sarac, Ali Fuat Kulle, Ozkan Akdeniz, | ||
| 0577 | Tolgay Kara | Robotic Shopping Cart | 2017 Fall | Heba Zakri, Wafaa Sukkar, Shahd Arab, | ||
| 0576 | Ergun Erçelebi | Development of biomedical device for ELECTRICAL STIMULATION FOR THE TREATMENT OF PAIN AND MUSCLE REHABILITATION - 2 | 2017 Fall | Esma Kayar, Sehriban Oruc, , | ||
| 0575 | Ergun Erçelebi | Development of biomedical device for ELECTRICAL STIMULATION FOR THE TREATMENT OF PAIN AND MUSCLE REHABILITATION - 1 | 2017 Fall | Berna Ozarslan, Zeynep Yasar, , | ||
| 0574 | Ergun Erçelebi | Remote power monitoring system - 1 | 2017 Fall | Eyyup Eriman, Burak Yilmaz, , | ||
| 0573 | Ergun Erçelebi | Remote power monitoring system - 2 | 2017 Fall | Mucahid Atceken, Mazhar Deniz, , | ||
| 0572 | Ergun Erçelebi | Energy Meter Reading over Internet - 2 | 2017 Fall | Sule Demir, Ceren Takmaz, , | ||
| 0571 | Ergun Erçelebi | Energy Meter Reading over Internet - 1 | 2017 Fall | Mervan Tan, Cemre Ozturk, , | ||
| 0570 | Ergun Erçelebi | REMOTELY CONTROLLED AUTOMATIC IRRIGATION SYSTEM ON SENSING SOIL MOISTURE CONTENT - 2 | 2017 Fall | Yunus Emre Aslan, Onur Askar, , | ||
| 0569 | Ergun Erçelebi | REMOTELY CONTROLLED AUTOMATIC IRRIGATION SYSTEM ON SENSING SOIL MOISTURE CONTENT - 1 | 2017 Fall | Isa Tuten, Fatih Mehmet Ozsunar, , | ||
| 0568 | Ergun Erçelebi | Self-Switching Power Supply - 2 | 2017 Fall | Necati Sahin, , , | ||
| 0567 | Ergun Erçelebi | Self-Switching Power Supply - 1 | 2017 Fall | Mehmet Ali Oguz, , , | ||
| 0566 | Arif Nacaroğlu | Lost Item Finder - 2 | 2017 Fall | Levent Ali Bulut, Anil Duserbayilmaz, , | ||
| 0565 | Arif Nacaroğlu | Lost Item Finder - 1 | 2017 Fall | Ozge Askan, Sinem Taskiran, , | ||
| 0564 | Uğur Cem Hasar | Wireless Phone Charging System - Part II - 2 | 2017 Fall | Emre Can Ozcelik, Mehmet Emin Hoyraz, , | ||
| 0563 | Uğur Cem Hasar | Wireless Phone Charging System - Part II - 1 | 2017 Fall | Ertan Gulhan, Serdar Tanriverdi, , | ||
| 0562 | Tolgay Kara | Voice-sensitive legged rescue robot - 2 | 2017 Fall | Ozgur Yalcin, Burhan Uguz, , | ||
| 0561 | Tolgay Kara | Voice-sensitive legged rescue robot - 1 | 2017 Fall | Suleyman Polat, Vedat Tas, , | ||
| 0560 | Tolgay Kara | Real-time robotic hand control using simple hand gestures - 2 | 2017 Fall | Fatih Aydin, Ridvan Uregen, Zeki Ucpinar, | ||
| 0559 | Tolgay Kara | Real-time robotic hand control using simple hand gestures - 1 | 2017 Fall | Besir Kilic, Ferhat Isiker, , | ||
| 0558 | Arif Nacaroğlu | Electromagnetic Bullet Accelerator - 2 | 2017 Fall | á¯brahim Topalbekiroglu, Orhan Oguz, , | ||
| 0557 | Arif Nacaroğlu | Electromagnetic Bullet Accelerator - 1 | 2017 Fall | Mucahit Izginli, Sefa Oral, , | ||
| 0556 | Arif Nacaroğlu | Sleep Apnea detector - 2 | 2017 Fall | Sonay Yakar, Kubra Temlik, , | ||
| 0555 | Arif Nacaroğlu | Sleep Apnea detector - 1 | 2017 Fall | Taha Yasin Kasa, Onur Midyatli, , | ||
| 0554 | Savaş Uçkun | Design and Construction by Using RFID - 2 | 2017 Fall | Hasan Onur Atac, , , | ||
| 0553 | Uğur Cem Hasar | Design of a new type electromagnetic absorber - Metamaterial absorber - 2 | 2017 Fall | Yunus Emre Esen, Mustafa Buyukkomurcu, , | ||
| 0552 | Mete Vural | Design of a DC-DC Buck Converter - 2 | 2017 Fall | Aynur Tuba Cakmak, Fatma Nur Celik, Muhammed Faruk Isiker, | ||
| 0551 | Tolgay Kara | Experimental PID design and tuning for a liquid level control problem - 2 | 2017 Fall | Ali Nail Arcdic, Mehmet Cengiz, , | ||
| 0550 | Arif Nacaroğlu | Stick balancer | 2017 Spring | Hamit Simsek, Abdulsamed Akbas, , | ||
| 0549 | Arif Nacaroğlu | Unshootable Woman | 2017 Spring | Abdullah Hamawiya, Gercek Cetinkaya, , | ||
| 0548 | Taner İnce | Obstacle avoiding robotic vehicle | 2017 Spring | Canan Yamakoglu, Tutku Uzun, , | ||
| 0547 | Uğur Cem Hasar | Design of a new type electromagnetic absorber - Metamaterial absorber - 1 | 2017 Fall | Suat Binici, Burak Korkmaz, , | ||
| 0546 | Uğur Cem Hasar | Wireless Phone Charging System | 2017 Spring | Mustafa Yuksek, Yusuf Korkmaz, , | ||
| 0545 | Nuran Doğru | 3D Foot Laser Scanner | 2017 Spring | Jakhongir Mamadov, Kamil Mustafa Ozturk, Bilal Sanverdi, | ||
| 0544 | Mete Vural | Design of a DC-DC Buck Converter - 1 | 2017 Fall | Vakkas Yildirim, Adem Dogan, Adem Yalcin, | ||
| 0543 | Serkan Özbay | Mobile phone signal jammer | 2017 Spring | Sezai Erdal, , , | ||
| 0542 | Serkan Özbay | Rapid Eye Movement (REM) Sleep Detection and Alarm Clock Design | 2017 Spring | Mustafa Okul, Eyup Dag, Emre Cokay, | ||
| 0541 | Savaş Uçkun | Design and Construction by Using RFID - 1 | 2017 Fall | Cem Kiray, , , | ||
| 0538 | Ergun Erçelebi | Improvement on Development of Electronic Card for Home Automation | 2017 Spring | Hakki Akyuz, Berkay Erten, , | ||
| 0537 | Ergun Erçelebi | Development of multifunctional wearable clock | 2017 Spring | Okkes Alacam, Ali Can Kel, , | ||
| 0536 | Ergun Erçelebi | Development of Kid in Car Reminder | 2017 Spring | Selami Sahin, Ahmet Tas, , | ||
| 0535 | Ergun Erçelebi | Development of Desktop information system | 2017 Spring | Seher ManavcáÝ, , , | ||
| 0534 | Ergun Erçelebi | Improvoment on development of breast milk pump | 2017 Spring | Cigdem ImáÝs, Zehra Yelen, , | ||
| 0533 | Ergun Erçelebi | Improvement On Development of Blood Pressure Meter | 2017 Spring | Joseph Gicumbi, Jouman Hajjar, , | ||
| 0532 | Ergun Erçelebi | Improvement on Development of Electronic Card for Power Management | 2017 Spring | Ibrahim Kizilcinar, Edip Mert Canbolat, , | ||
| 0531 | Gölge Öğücü | Solar Home Infrastructure | 2017 Spring | Okan Dinc, Ahmet Erdogan Bugdayci, , | ||
| 0530 | Gölge Öğücü | Finger Mouse | 2017 Spring | Ibrahim Ucel, Hamza Demirci, Ibrahim Okur, | ||
| 0529 | Nurdal Watsuji | Pulse Meter with Voice Warning System | 2017 Spring | Cemalettin Oztoprak, , , | ||
| 0528 | Tolgay Kara | Color sensitive autonomous mobile robot | 2017 Spring | Anil Atilgan, Yasin Kara, , | ||
| 0527 | Tolgay Kara | Cascade control of a double tank liquid level process | 2017 Spring | Aslihan Kucukkilinc, Nazan Ozturk, Nursen á¯sik, | ||
| 0526 | Tolgay Kara | Experimental PID design and tuning for a liquid level control problem - 1 | 2017 Fall | Ahmet Hacihasanoglu, Erbil Esen, , | ||
| 0525 | Nurdal Watsuji | Traffic signal system of a 4-way junction based on density (II) | 2016 Fall | Mohamed Nezhat Kaddour, Noura Idris, Muntaser Arab, | ||
| 0524 | Gölge Öğücü | An autonomic robot [XII] | 2016 Fall | Mahmut Kaan Kucukoglu, Mesut Gumus, , | ||
| 0523 | Gölge Öğücü | An autonomic robot [XI] | 2016 Fall | Nurdagul Basak, Ahmet Karagoz, Burcu Bakim, | ||
| 0522 | Gölge Öğücü | An autonomic robot [X] | 2016 Fall | Meryem Camuz, Zekeriya Sarikol, Mehmet Meki Cabuk, | ||
| 0521 | Gölge Öğücü | An autonomic robot [IX] | 2016 Fall | Onur Yildiz, Mehmet Efe Karabulut, Oguz Kaan Karadag, | ||
| 0520 | Savaş Uçkun | An autonomic robot [VIII] | 2016 Fall | Sadik Delioglu, Suleyman Ali Aydin, Komi Spero Hegbe, | ||
| 0519 | Savaş Uçkun | An autonomic robot [VII] | 2016 Fall | Semsettin Karakus, Omer Aslan, Yusuf Kilinc, | ||
| 0518 | Savaş Uçkun | An autonomic robot [VI] | 2016 Fall | Zaw Htet Aung, Rahsan Goksu, Veysel Celikturk, | ||
| 0517 | Savaş Uçkun | An autonomic robot [V] | 2016 Fall | Yusuf Aras, Alican Cetin, Ahmet Serkan Pelit, | ||
| 0516 | Arif Nacaroğlu | An autonomic robot [IV] | 2016 Fall | Huseyin Ozay, Nesrin Tekin, Hasan Huseyin Sahin, | ||
| 0515 | Arif Nacaroğlu | An autonomic robot [III] | 2016 Fall | Ali Fuat Atay, Mehmet Bostanci, Kerim Akgun, | ||
| 0514 | Arif Nacaroğlu | An autonomic robot [II] | 2016 Fall | Goktug Zulkadir, Burak Yarar, Mehmet Dogan, | ||
| 0513 | Arif Nacaroğlu | An autonomic robot [I] | 2016 Fall | Yousf Alkhudairy, Abdulrahman Alshaikhli, Mehmet Baydar, | ||
| 0512 | Nuran Doğru | Remote Controlled Robotic Arm | 2016 Fall | Volkan Guler, Hasan Eroglu, Huseyin Bayca, | ||
| 0511 | Uğur Cem Hasar | Design and control of a Hovercraft with a Remote Controller and a Camera | 2016 Fall | M. Ali Karasurmeli, Elif Kavus, , | ||
| 0510 | Uğur Cem Hasar | Automatic Parking Robot | 2016 Fall | Coskun Deli, Yaprak Kapucu, , | ||
| 0509 | Nurdal Watsuji | Traffic signal system of a 4-way junction based on density (I) | 2016 Fall | Abdullah Alan, Muzaffer Sur, Nadir Akbulut, | ||
| 0508 | Mete Vural | Web Based Data Acquisition for Photovoltaic Power System | 2016 Fall | Velican Ulusoy, Ismail HakkáÝ Cengiz, , | ||
| 0507 | Mete Vural | Arduino Based Power Factor Calculator | 2016 Fall | Omer Kircali, Ibrahim Yilmaz, , | ||
| 0506 | Sema Kayhan | Recognition of brand and type of vehicle using image processing | 2016 Fall | Elif Erin, , , | ||
| 0505 | Sema Kayhan | Voice Controlled Wheelchair | 2016 Fall | Ayse Nur Killi, Taylan Usuk, , | ||
| 0504 | Serkan Özbay | Solar Tracking System | 2016 Fall | Abdulkadir Onur Cavas, Ismail Akay, , | ||
| 0503 | Ergun Erçelebi | Remote Irrigation System with GSM and Ethernet | 2016 Fall | Ahmet Lutfi Kilinc, Onder Cicek, Musa Dagdeviren, | ||
| 0502 | Mete Vural | Remote controlling electrical snowplow car with camera (ROBOPLOW) | 2016 Fall | Yigit Demirci, Melih Kocar, , | ||
| 0500 | Rauf Mirzababayev | Device to measure athmospheric pressure ,humidity and temperature | 2016 Fall | Muslum Yildirim, Selman Seven, , | ||
| 0499 | Serkan Özbay | Automated lecture attendance system based on face recognition | 2016 Fall | Abdulbaki Alas, Sercan Algul, , | ||
| 0498 | Mete Vural | Small Prototype DC Microgrid | 2016 Fall | Kemal Cetinkaya, Emrah Hakverdi, Ozkan Erdem, | ||
| 0497 | Serkan Özbay | Lecture attendance system based on fingerprint recognition | 2016 Fall | Recep Kubilay Kuyumcu, Onur Pekmezci, Ozcan Oruc, | ||
| 0496 | Serkan Özbay | Lecture attendance system based on face recognition | 2016 Fall | Pelin Coklar, Cansu Akdogan, , | ||
| 0495 | Nurdal Watsuji | Car Parking Project | 2016 Fall | Zehra Camdali, Nuri Kose, Mustafa Taskin Altun, | ||
| 0494 | Ergun Erçelebi | Development of Touch screen based Home Appliance Control System using Wireless Communication (II) | 2016 Fall | Fatih Cicekoglu, Ibrahim Cihat Uyanik, , | ||
| 0493 | Nurdal Watsuji | Four channel colour sorting | 2016 Fall | Elif Picak, Furkan Sari, Ali Sagaltici, | ||
| 0492 | Taner İnce | Distance measurement by ultrasonic sensors | 2016 Fall | Mehmet Sahin Aycicek, Mucahit Baytekin, , | ||
| 0491 | Taner İnce | Car parking system using RFID | 2016 Fall | Omer Tasdemir, Fatih Cakar, Abdullah Sukru Bas, | ||
| 0490 | Taner İnce | Fingerprint authentication system based door lock | 2016 Fall | Akin Gunduz, Nursah Polat, , | ||
| 0489 | Taner İnce | Automatic car over speed detection system | 2016 Fall | Mustafa Turkmen, Engin Ozturkcan, Gizem Erguzel, | ||
| 0488 | Nuran Doğru | 3D Foot Laser Scanner | 2016 Fall | Yildiray Parla, Ugur Okmen, Melisa Karakus, | ||
| 0487 | Nuran Doğru | Laser Cutter | 2016 Fall | Atalay Tahir Ciger, Fatih Tokgoz, , | ||
| 0486 | Tolgay Kara | Automatic Prosthetic Arm | 2016 Fall | Gokhan Arslan, Sinan Cetin, Alp Berkan Akinli, | ||
| 0485 | Tolgay Kara | Test stand for attitude control of quadcopters | 2016 Fall | Muhammed Ayrilmak, Taylan Unnu, Ersin Kilic, | ||
| 0484 | Tolgay Kara | Haptic warning system for the deaf | 2016 Fall | Murat Kucuk, Emrah Eryilmaz, , | ||
| 0483 | Rauf Mirzababayev | Device for a pipeline freezing prevention in a winter time of an outdoor water heaters | 2016 Fall | Enes Solak, Omer Yasar Soyturk, , | ||
| 0482 | Rauf Mirzababayev | Electronic belly massage device | 2016 Fall | Rojhat Kara, Yakup Aglamis, , | ||
| 0481 | Rauf Mirzababayev | Electronic barometer (Weather prediction) | 2016 Fall | Furkan Demir, Hasan Memis, , | ||
| 0480 | Ergun Erçelebi | Development of Touch screen based Home Appliance Control System using Wireless Communication (I) | 2016 Fall | Ahmad Abdulkarim, , , | ||
| 0479 | Ergun Erçelebi | Development of LED Lighting Driver Circuit | 2016 Fall | Mehmet Korkmaz, Kemal Cagdas Metin, , | ||
| 0478 | Ergun Erçelebi | Development of Breast Milk Pump | 2016 Fall | Meltem Ercin, Ozge Cagirtekin, , | ||
| 0477 | Ergun Erçelebi | Development of Blood Pressure Meter | 2016 Fall | Ferhat Kılıç, Fırat Işık, , | ||
| 0476 | Ergun Erçelebi | Development of Electronic Card for Home Automation | 2016 Fall | Omer Kokten, Tolga Yilmaz, , | ||
| 0475 | Ergun Erçelebi | Development of Electronic Card for Power Management | 2016 Fall | Jelil Orazmyradov, Guly Amangulyyev, , | ||
| 0474 | Uğur Cem Hasar | Animatronic Hand | 2016 Spring | Sukru Unsal Urunver, Zeynep Karakus, , | ||
| 0473 | Uğur Cem Hasar | Analysis and Design of Multilayer Rugate Filters | 2016 Spring | Nevzat Ayan, , , | ||
| 0472 | Uğur Cem Hasar | Fire Extinguisher by Ultra-Sound Waves | 2016 Fall | Ibrahim Sinan Atas, Neytullah Arslan, , | ||
| 0471 | Nurdal Watsuji | Person-following robot | 2016 Spring | Mustafa Avci, Ali Erdogan, Aytac Arslan, | ||
| 0470 | Ahmet Uçar | Position Control of a Permanent Magnet DC Motor by the frequency response method. | 2016 Fall | Nazim Abdullah Guler, Abdussamet Kiymik, Baris Er, | ||
| 0469 | Tolgay Kara | 2-DOF position control of a simplified helicopter model | 2016 Spring | Ozhan Dokumaci, Onurcan Kaymak, Salih Gokkaya, | ||
| 0468 | Ahmet Uçar | Position Control of a Permanent Magnet DC Motor by root locus method | 2016 Fall | Sinem Basar, Tolga Soyak, , | ||
| 0467 | Nuran Doğru | Design and implementation of FPGA based object tracking algorithm | 2016 Spring | Ahmet Enes Gormez, Said Nur Vurgun, Ahmet Unge, | ||
| 0466 | Savaş Uçkun | Design and construction based on RFID | 2016 Spring | Hasan Taylan Tataroglu, , , | ||
| 0465 | Sema Kayhan | Bluetooth Controlled Electronic Home Automation System Using Android | 2016 Spring | Sefer Serhat Yazgan, , , | ||
| 0464 | Nuran Doğru | 3D Laser Scanner | 2016 Spring | Ugur Ugurlugelen, Tubay Cicekci, Remzi Ozen, | ||
| 0463 | Mete Vural | Bluetooth Controlled Mecanum Wheel Robot | 2016 Spring | Ali Karakus, Ismet Celik, Zeynel Abidin Sabas, | ||
| 0462 | Tolgay Kara | Implementation of Cascade Control for a Beam and Ball System Using Matlab | 2016 Spring | Gazihan Gulkalem, Mustafa Parcaci, , | ||
| 0461 | Vedat Karslı | Controlling of a self balancing scooter | 2016 Spring | Ibrahim Turgut, Shewit Weldu Tesfay, Manwouna Yaou, | ||
| 0460 | Vedat Karslı | Controlling of a self balancing and line following table | 2016 Spring | Anil Efe Efesoy, Mahmut Cevik, Buket Yildirim, | ||
| 0459 | Vedat Karslı | Design and construction of an educational experimental E_Learning setup system remotely controlled and operated at home by a PC (Electrical machines E_Learning course) | 2016 Spring | Sinan Ilhan, Bakmurat Kubanaliev, Aya Joubi, | ||
| 0457 | Vedat Karslı | Control of a Quadcopter | 2016 Spring | Serkan Demir, Resit Kilic, Hakan Inci, | ||
| 0456 | Vedat Karslı | Design, construction and control of a single axis (freedom) base of robot system | 2016 Spring | Ibrahim Gov, Aydin Demirel, , | ||
| 0454 | Sema Kayhan | Remote controlling of a robot by using the gyroscope of the mobile phone | 2016 Spring | Cemal Keskin, Mehmet Ali Cap, , | ||
| 0453 | Savaş Uçkun | Design and construction based on RFID II | 2015 Fall | İsmail Polat, , , | ||
| 0452 | Savaş Uçkun | Design and construction based on RFID I | 2015 Fall | Süleyman Kaya, , , | ||
| 0451 | Vedat Karslı | Repairing and control of a prototype 3D PCB production machine II | 2015 Fall | Burak Çalışkan, Mustafa Çabuk, , | ||
| 0450 | Tolgay Kara | An autonomic robot [IV] | 2015 Fall | Serap Sağır, Melih Çelik, , | ||
| 0449 | Vedat Karslı | Improvement of a Quadcopter | 2015 Fall | Mehmet Göğebakan, Musab Aktaş, , | ||
| 0448 | Tolgay Kara | An autonomic robot [III] | 2015 Fall | Mehmet Kuyar, Vedat Kocaman, Erol Gündüz, | ||
| 0447 | Tolgay Kara | An autonomic robot [II] | 2015 Fall | Serkan Akkılıç, Taha Konuk, Murat Çelik, | ||
| 0446 | Tolgay Kara | An autonomic robot [I] | 2015 Fall | Muhammed Mustafa Yıldız, Şekip Dalgaç, Nurullah Çağlar, | ||
| 0445 | Nurdal Watsuji | Car park aid | 2015 Fall | Ömer Faruk Mücahit Kaymaz, , , | ||
| 0444 | Serkan Özbay | Improvement of eye tracking system | 2015 Fall | Medine Çandır, Özge Gök, Hatice Demir, | ||
| 0443 | Serkan Özbay | Improvement of Wireless power transfer system | 2015 Fall | Merve Sever, Merve Demirel, , | ||
| 0442 | Ergun Erçelebi | Improvement of mobile phone controlled robot design | 2015 Fall | Nihal Çalışkan, Gizem Özgüzel, , | ||
| 0441 | Taner İnce | Remote control of Robot with Android Phone | 2015 Fall | Dilvin Özgüneyli, Kübra Öztunç, , | ||
| 0440 | Nurdal Watsuji | Variable Speed Multi Program Sumo Robot | 2015 Fall | Uğur Can Adaş, Hasan Aktaş, , | ||
| 0439 | Sema Kayhan | Pulse Meter Design | 2015 Fall | İsmail Köroğlu, Uğur Oku, , | ||
| 0438 | Ergun Erçelebi | XY-Plotter Design | 2015 Fall | Şevki Yılmaz, Mehmet Okan Karakuzular, , | ||
| 0437 | Arif Nacaroğlu | Gap Jumping Robot | 2015 Fall | Yusuf Karakoç, Gamze Adıgüzel, , | ||
| 0436 | Nurdal Watsuji | Floor Parking Project | 2015 Fall | Sercan Bozkurt, , , | ||
| 0435 | Rauf Mirzababayev | Design and Construction of A Balancing Robot | 2015 Fall | Utku Çınar, Vahide Aykaç, , | ||
| 0434 | Tolgay Kara | Design and Construction of an Automatic Target Shooting Tank | 2015 Fall | Leyla Özdemir, Hazan Özbek, , | ||
| 0433 | Vedat Karslı | Power Generator Shoes | 2015 Fall | Mehmet Burak Türkcan, Ömer Faruk Elçim, Taner Cem Gülşen, | ||
| 0432 | Serkan Özbay | Improvement of Microcontroller and DTMF based automated soil irrigation system | 2015 Fall | Süleyman Burak Çoban, Tuğba Boydağ, , | ||
| 0431 | Arif Nacaroğlu | Heat Tracking PC Based Mobile Robot | 2015 Fall | Casım Argündoğan, Musa İrgi, , | ||
| 0430 | Rauf Mirzababayev | Flight Control of Small Electric Aircraft | 2015 Fall | Neslihan Tuttokmağı, Sefa Nur Yatalakoğlu, , | ||
| 0429 | Vedat Karslı | Greenhouse Robot Project | 2015 Fall | Abdülkadir Öyke, Sabri Alperen, Ramazan Salık, | ||
| 0428 | Rauf Mirzababayev | PH Meter with Temperature Sensor | 2015 Fall | Mesut Akbaş, Nadire Eda Adanır, , | ||
| 0427 | Nurdal Watsuji | Mobile Alarm Clock | 2015 Fall | Recep Ayhan, Mehmet Ali Caymaz, , | ||
| 0426 | Ergun Erçelebi | Design and Implementation of Quadcopter II | 2015 Fall | Ali Volkan Gökbulut, Muhammed Bulut, , | ||
| 0425 | Tolgay Kara | PLC based liquid level control and mixing | 2015 Fall | Ümit Demir, Bozan Ecer, Abdülmelik Taşkın, | ||
| 0424 | Vedat Karslı | Control of single axis electromagnetic levitation system using microcontroller/FPGA | 2015 Fall | Hasan Baltacı, Gökhan Demir, , | ||
| 0423 | Tolgay Kara | Design and Implementation of a 2DOF Helicopter Motion Control Experiment | 2015 Fall | Kerem Güzel, Oğuzhan Koca, Buğra Berik, | ||
| 0422 | Sema Kayhan | Voice Controlled Car | 2015 Fall | Mücahit Karaman, Cihangir Kaya, , | ||
| 0421 | Mete Vural | PIC Based Single Phase H-bridge Inverter with Two Different Modulation Schemes | 2015 Fall | Fatma Merve Ayaz, , , | ||
| 0420 | Ergun Erçelebi | Development of Voice Over IP (VoIP) for Voice Communication Over Internet | 2015 Fall | Khaled Asaad, , , | ||
| 0419 | Ergun Erçelebi | Prototype Design of Coffee Maker Machine | 2015 Fall | Hasan Özsoy, Mehmet Emin Kuş, , | ||
| 0417 | Ergun Erçelebi | Implementation of Turbo channel coder in FPGA | 2016 Spring | Resat Surucu, Sefa Sanbay, , | ||
| 0416 | Ergun Erçelebi | Design and Implementation of Quadcopter I | 2015 Fall | Cihan Demir, Mehmet Ergül, , | ||
| 0415 | Ergun Erçelebi | 3D Printer Design | 2015 Fall | Hakan Çetinkaya, Ali Güneş, Kemal Tur, | ||
| 0413 | Sema Kayhan | Automatic Car Parking System | 2015 Fall | Mehmet Topak, , , | ||
| 0412 | Sema Kayhan | Design and Control a Conveyor Band to Count and Separate Parts on it | 2015 Fall | Fatih Bozdağ, , , | ||
| 0411 | Taner İnce | Sudoku Solver using Signal Processing | 2015 Fall | Sümeyye Andaç Güler, Neziha Demir, , | ||
| 0410 | Taner İnce | Automatic Turkish Coffee Maker | 2015 Fall | İsa Orbay, Semih Gencer, , | ||
| 0409 | Mete Vural | Internet-controlled 100W single-phase inverter for renewable energy applications | 2015 Fall | Hüseyin Soysal, Hakan Sürer, , | ||
| 0408 | Ergun Erçelebi | Design and implementation of prototype sizing machine | 2015 Fall | Mustafa Can Ekinci, , , | ||
| 0407 | Tolgay Kara | Beam and Ball control using Matlab | 2015 Fall | Aykut Tamer, Burak Selin Kaynak, Fatih Özkan Alkurt, | ||
| 0406 | Mete Vural | Single-phase Smart Meter | 2015 Fall | Sedat Şahin, Uğur Özdemir, , | ||
| 0405 | Mete Vural | Internet based current measurement for smart grid environment | 2015 Fall | Bilal Özçaycılar, Devran Yakar, , | ||
| 0404 | Tolgay Kara | Simple plotter | 2015 Spring | İsmail Koşan, Ahmet Türk, Aziz Tukik, | ||
| 0403 | Mete Vural | Wireless Temperature Transfer (II) | 2015 Spring | Ahmet Acar, , , | ||
| 0402 | Vedat Karslı | Design and construction of a remote control unit by a mobile phone or GSM module for a telemetry system | 2015 Spring | Murat Çakır, Gökhan Özkan, , | ||
| 0401 | Vedat Karslı | Design and construction of a prototype 3D printing machine (II) | 2015 Spring | Önder Orbeyi, Sadık Aktulum, Hamza Emir, | ||
| 0399 | Vedat Karslı | Sample and store at least 4 channel analog signals on a micro SD card and display them on a graphic LCD in real time. | 2015 Spring | Kemal Refik Ertabak, Oğuzhan Yıldız, , | ||
| 0398 | Ergun Erçelebi | Design and Implementation of Advanced Encryption Standard on an FPGA | 2015 Spring | Sedat Özdemir, Eray Köse, , | ||
| 0397 | Tolgay Kara | Medication Finder | 2015 Spring | Ömer Arslan, , , | ||
| 0396 | Rauf Mirzababayev | Fruit Dryer | 2015 Spring | Erhan Uluğ, Deniz Yalçın, , | ||
| 0395 | Taner İnce | Design of a Braille alphabet printer | 2015 Spring | Gülçin Hande Altaş, Yasin Özer Yorulmaz, , | ||
| 0394 | Taner İnce | Development of an android application for image processing | 2015 Spring | Merdan Oǧuzhan Çelik, Mustafa Yasin Erdem, , | ||
| 0393 | Rauf Mirzababayev | PH Meter | 2015 Spring | Melek Aydoğan, Seher Kılınç, , | ||
| 0392 | Gölge Öğücü | Secure Wearable ID Watch | 2015 Spring | Bensu Pınar Bozoğlan, Mertcan Tok, Adem Ekinci, | ||
| 0391 | Gölge Öğücü | Swivel Makeup Mirror | 2015 Spring | Harun Gürdal, Bünyamin Çalık, , | ||
| 0390 | Savaş Uçkun | Design and construction based on RFID | 2015 Spring | Yusuf Bülbül, Ömer Abrancı, , | ||
| 0389 | Ergun Erçelebi | Improvement of Microcontroller and DTMF based automated soil irrigation system | 2015 Spring | İbrahim Karademir, , , | ||
| 0387 | Ergun Erçelebi | Development of belt lift for the automotive industry | 2015 Spring | Hüseyin Al, Mustafa Toygar, , | ||
| 0386 | Ergun Erçelebi | Development of isolated word-speech recognition with DSPIC or PIC32 microcontroller | 2015 Spring | Kübra Kurum, , , | ||
| 0385 | Ergun Erçelebi | Development of PIC32 Microcontroller Platform for Game Programming | 2015 Spring | Mehmet Orhan Soyttürk, , , | ||
| 0384 | Ergun Erçelebi | Monitoring and Control Using PLC and SCADA in Photovoltaic solar system | 2015 Spring | Semih Karabulut, İsmail Gevher, , | ||
| 0383 | Nurdal Watsuji | Robotic Hand Quadcopter | 2015 Spring | Gökhan Gülmez, Ebubekir Aykut, , | ||
| 0382 | Uğur Cem Hasar | Animatronic Hand | 2015 Spring | Hilal Kılınç, , , | ||
| 0381 | Serkan Özbay | High Precision Voltmeter for Remote Operation | 2015 Spring | Bahar Günal, , , | ||
| 0379 | Mete Vural | Wireless Temperature Transfer | 2015 Spring | Cansu Akkuş, , , | ||
| 0378 | Mete Vural | Arduino based digital oscilloscope | 2015 Spring | Ekin Erdoğdu, Rıdvan Alpay Kurbaloğlu, , | ||
| 0377 | Sema Kayhan | A voice calculator | 2014 Fall | Mahmut úiloğlan, Erman Kolsuz, , | ||
| 0376 | G—lge øğ■c■ | Unmanned mobile target GPS pointer system | 2014 Fall | Selman Arslan, Sadık Omak (Antep), ømer øncel, İsa S■rer | ||
| 0375 | Ergun ErÓelebi | A mobile phone-controlled robot design II | 2014 Fall | Muhammed Bayram, Mehmet øzyılmaz, , | ||
| 0374 | Uğur Cem Hasar | Automatic car braking system | 2014 Fall | Erkan Erdem (Manisa), , , | ||
| 0373 | Rauf Mirzababayev | Device for the atmospheric pressure and humidity measurements I | 2014 Fall | Ahmed Aydın, Duishon Satbaldyev, , | ||
| 0372 | Serkan øzbay | Portable solar-powered charging station for electric devices II | 2014 Fall | Mustafa Aksu, Ahmet Zişan Koca, T■mer Savat, | ||
| 0371 | Ahmet UÓar | Automation of greenhouse over the Internet | 2014 Fall | Ali Taşkin, G—khan Velet, Yakup Yener, | ||
| 0370 | Uğur Cem Hasar | Object collection and sorting by an autonomous robot | 2014 Fall | Şeyma Pınar Alapinar (Adana), H■samettin úoban, Ezgi Karakaya, Veysel Yıldırım | ||
| 0369 | Rauf Mirzababayev | Electronic scale | 2014 Fall | Emek Hazal Bingol, Hasan karadağ, , | ||
| 0368 | Rauf Mirzababayev | Device for the atmospheric pressure and humidity measurements II | 2014 Fall | Ali Alpar Annag■r, İlker Okuducu, , | ||
| 0367 | G—lge øğ■c■ | Robotic painter | 2014 Fall | Fırat Banisi, G■ven úeberli, Ozan G—kdere, | ||
| 0366 | Serkan øzbay | Smart automobile units control system | 2014 Fall | Muhammet Cihangiroğlu (Antep), , , | ||
| 0365 | Serkan øzbay | Portable solar-powered charging station for electric devices I | 2014 Fall | Ulaş Dikme, Yusuf Bilge Saldamlı, Alperen Soyalp, | ||
| 0364 | Serkan øzbay | Wireless power transfer system | 2014 Fall | Suna Deniz, Atiye Zeynep Diken, , | ||
| 0363 | Arif Nacaroğlu | Underwater robot | 2014 Fall | Ahmet Karakurt, Oğuzhan Karakuş, , | ||
| 0362 | Arif Nacaroğlu | Rope-jumping robot | 2014 Fall | Ergin Acar Akg■l, Mehmet Muşta, , | ||
| 0361 | Vedat Karslı | Insect killer_1 | 2014 Fall | G—khan Parlak, , , | ||
| 0360 | Vedat Karslı | Home Automation Over Internet [v2] | 2014 Fall | Zerrin G■lderen, G—khan Terzi, Feride Yıldız (Antep), | ||
| 0359 | Vedat Karslı | Design, construction and Control of a Ginger | 2015 Spring | Bahadır Halil, İbrahim Kocaöz, Celal Solak, | ||
| 0358 | Vedat Karslı | Design and construction of a prototype 3D PCB production machine | 2015 Spring | Alican Öztürk, Tuğcan Dündar, Mustafa Eren Sevimli, | ||
| 0357 | Vedat Karslı | Repairing and control of a prototype 3D PCB production machine I | 2015 Fall | Burak Erdurak, , , | ||
| 0356 | Vedat Karslı | Design and construction of a prototype 3D printing machine | 2015 Spring | Samed Tuğluoğlu, Onur Dokumacı, Bahattin Baki Çoşkun, | ||
| 0355 | Ergun ErÓelebi | Implementation and design of an L-band up and down converter | 2014 Fall | Emin Akkurt (Ankara), Eray Erbay, , | ||
| 0354 | Ergun ErÓelebi | A mobile phone controlled robot design I | 2014 Fall | Murat Cebeci, Velit úaltekin (Antep), , | ||
| 0353 | Ergun ErÓelebi | Microcontroller and DTMF based automated soil irrigation system | 2014 Fall | G—khan Yaylak, Ender Yiyit, , | ||
| 0352 | Ergun ErÓelebi | Design and implementation of grounding resistance measurement and monitoring system | 2014 Fall | Alican Doğruel, Can KoÓ, , | ||
| 0351 | Ergun ErÓelebi | Simulation of vector controlled Brushless DC Motors | 2014 Fall | Bet■l Elhan, , , | ||
| 0350 | Ergun ErÓelebi | Implementation and design of delta-sigma Modulator | 2014 Fall | Nihat Altun (istanbul), , , | ||
| 0349 | Mete Vural | Ardunio based GPS controlled car (II) | 2014 Fall | Aylin Gesoğlu, Gizem Yalman, , | ||
| 0348 | Mete Vural | Wireless wind speed measurement (I) | 2014 Fall | İbrahim úelik, Yağmur İlhan (Antep), , | ||
| 0347 | Nurdal Watsuji | Person-following robot (II) | 2014 Fall | Muhsine Efe, K■bra G—ksu, Osman İlhan, | ||
| 0346 | Nurdal Watsuji | Person-following robot (I) | 2014 Fall | İsmail Serkan Bulut, Fatih Korkmaz, Mahmut ølÓ■l■, | ||
| 0345 | Tolgay Kara | Autonomous field resource and rescue system | 2014 Summer | Semir Aydin (istanbul), Merve Benli (istanbul), , | ||
| 0344 | Vedat Karslı | Preparation of at least two experimental setups for ALTERA FPGA DE2-115 development board | 2014 Fall | Aysel Bekler, G—khan Bilik, , | ||
| 0343 | Vedat Karslı | Design and construction of a remote control unit by a mobile phone or GSM module for a telemetry system | 2014 Fall | Murat Cakır, Cumali GenÓer, , | ||
| 0342 | Vedat Karslı | Preparation of at least two experimental setups for MSP430 16 bit MCU | 2014 Fall | Ahmet Canbolat, Alican Yaldız (Antep), , | ||
| 0339 | Vedat Karslı | Preparation of at least two experimental setups for STM32F0 32bit ARM cortex MCU (I) | 2014 Fall | Mehmet Uğur Kebir, Tuğrul KekeÓ, , | ||
| 0338 | Vedat Karslı | Design and construction of a secure RF remote control unit for a telemetry system | 2014 Fall | Bahadır G—kÓe, Okan øzbaş, , | ||
| 0337 | Sema Kayhan | Automated ventilation and safety for a smokers room | 2014 Summer | Sedat Kanatlı (istanbul), Recep Pehlivan, , | ||
| 0336 | Tolgay Kara | Experimental PID design for position control of a PMDC motor | 2014 Fall | Abdurrahim Muratoğlu (istanbul), Murat Taş, , | ||
| 0335 | Tolgay Kara | Experimental PID design for speed control of a PMDC motor | 2014 Summer | Hacı Altay (istanbul), İkbal Nurullah Dal (adana), , | ||
| 0334 | Mete Vural | Single-phase digital wattmeter | 2014 Fall | Mevl■t Demirci, Halime Şahin, , | ||
| 0333 | Mete Vural | Ardunio based GPS controlled car (I) | 2014 Fall | Yeşim Kaplan, Ceren Tuğba Karakaya, , | ||
| 0331 | Mete Vural | Wireless wind speed measurement (II) | 2014 Fall | Ahmet Şengez, Tolgacan Y■cel, , | ||
| 0330 | Arif Nacaroğlu | Hand held device for remote height estimation | 2014 Spring | Sedat Onatlı, Akbar Shadakov, , | ||
| 0328 | Serkan øzbay | Design of a vending machine prototype | 2014 Spring | Buğra Aslan, İpek Yurdakul, , | ||
| 0326 | Tolgay Kara | Sentry Gun Project Defined Object Detection | 2014 Spring | Mehmet Emin Deniz, Mehmet Ali Durğay, Onur Ulusoy, Şeyma Yaman | ||
| 0325 | Rauf Mirzababayev | Automatic gain for an audio system | 2014 Spring | Osman Bostancı, Mehmet T■rkmen, , | ||
| 0324 | Serkan øzbay | Automatic rain sensing wiper for automobiles | 2014 Spring | Fatih Kececioğlu, Arif Yildiz, , | ||
| 0323 | Arif Nacaroğlu | Line-following, gap-jumping robot | 2014 Spring | Ersun Altan, Musab Bayat, , | ||
| 0322 | Vedat Karslı | Home automation over PAN | 2014 Spring | Hakkı Işık, İlkercan İncili, , | ||
| 0321 | Vedat Karslı | A prototype levitation control system using dsPIC30F4011/dsPIC30F2011 (II) | 2014 Spring | Şehmus BaşÓı, Beraat İpek, Ahmet Layık, | ||
| 0320 | Vedat Karslı | Prototype levitation control system using dsPIC30F 4011/2011 (I) | 2014 Spring | S■leyman úetinkaya, Anıl ú—zvelioğlu, , | ||
| 0319 | Vedat Karslı | Design and construction of an RF remote control unit (sender and receiver) for a Quadcopter (II) | 2014 Fall | İhsan Demir, İlyas Kaya, , | ||
| 0318 | Vedat Karslı | Design and construction of speed controller of a Quad-copter (I) | 2014 Fall | B■şranur Polat, Dilara Saygı (Antep), , | ||
| 0317 | Vedat Karslı | Three dimensional controlling of a graphic shape drawn on the monitor of a PC with a data taken from a microcontroller through USB and/or RS232 port | 2015 Spring | Oğuz Kaan Erikan, İbrahim Gülçek, , | ||
| 0316 | Tolgay Kara | Autonomous blimp with altitude control | 2014 Spring | Yaşar Karacan, Émit TunÓ, , | ||
| 0315 | Savaş Uçkun | Design and construction based on RFID | 2014 Fall | Batuhan Demiralp, Kaan Sarıveli, , | ||
| 0314 | Erg■n ErÓelebi | DC/AC single-phase voltage source inverter design | 2014 Spring | Ezgi Evlice, Elzem Misirli, , | ||
| 0313 | Erg■n ErÓelebi | Improvement of an automatic car parking system | 2014 Spring | Mehmet Can Alkan, Stefan Ayg■l, , | ||
| 0311 | Nuran Doğru | DC Power Supply (fly back topology) | 2013 Fall | Orhan Alasoy, Ey■p Kaya, , | ||
| 0310 | Andrew Beddall | Smart crib rocker | 2013 Fall | Lokman Ektiren, Veysi G—khan, , | ||
| 0309 | Savaş UÓk■n | FM jammer and transmitter | 2013 Fall | Arda Eftekin, , , | ||
| 0308 | Andrew Beddall | Following Robots | 2013 Fall | İlyas Karasati, Mehmet Mihdi, , | ||
| 0306 | Nuran Doğru | PC to PC fiber optic communication | 2014 Spring | Canan Kızılateş, Nilay øzgirgin, , | ||
| 0305 | Serkan øzbay | Metal detector II | 2013 Fall | Adil Uğur Pehlivan, A. Samet Toprak, , | ||
| 0304 | Sema Kayhan | FPGA-Based EKG development | 2013 Fall | Emre Yazkan, , , | ||
| 0303 | Uğur Cem Hasar | Box filler | 2013 Fall | Kadirhan Dinler, , , | ||
| 0302 | G—lge øğ■c■ | Sorting boxes according to their height | 2013 Fall | Mustafa Tasci, Harun Tastan, , | ||
| 0301 | Tolgay Kara | Wireless glove-controlled robotic arm | 2013 Fall | İsmail Uğur D■ndar, Yavuz Éz■lmez, , | ||
| 0300 | Nurdal Watsuji | Car park aid II | 2013 Fall | Osman Demir, Derviş Yiğit, , | ||
| 0299 | Arif Nacaroğlu | Smart traffic lights | 2013 Fall | Ali Taşdemir, Murat Timurtaş, , | ||
| 0298 | Andrew Beddall | Automatic watering system | 2013 Fall | Mehmet Aktağ, Ertuğrul Kurubal, , | ||
| 0297 | Serkan Özbay | Metal detector | 2015 Fall | Burak Yıldırım, , , | ||
| 0296 | Celal Koraşlı | Extracting heat from underground power transmission cables | 2013 Fall | Nurullah úetin, Necati Kutlucan, , | ||
| 0295 | Vedat Karslı | Design and construction for a Quadcopter (II) | 2013 Fall | Yusuf K—sesoy, Sefa Şimşek, Yavuz Temur, Zafer Yılmaz | ||
| 0294 | Rauf Mirzababayev | Human heat as a light source (II). | 2013 Summer early | Abdulkadir Akdağ, Tahsin úalkendir, , | ||
| 0293 | Nurdal Watsuji | Car park aid | 2014 Spring | Servet Bilaloğlu, Hakan D—nmez, , | ||
| 0292 | Erg■n ErÓelebi | Three-floor elevator | 2013 Fall | Harun Tonbuloğlu, Ramazan Toprak, , | ||
| 0291 | Andrew Beddall | Body temperature regulation for small animals | 2013 Fall | K■bra Bırcan, Esma Doğru, , | ||
| 0290 | Rauf Mirzababayev | Fire-powered cellular phone charger | 2013 Fall | Cansu Talaş, , , | ||
| 0289 | Erg■n ErÓelebi | Student lecture attendance system | 2013 Fall | Alican S—nmez, , , | ||
| 0288 | Erg■n ErÓelebi | Preparing digital signal processing laboratory experiments on a DSP starter kit | 2014 Spring | Sadık Afşar, , , | ||
| 0287 | Erg■n ErÓelebi | 3D video data generation | 2013 Fall | Mustafa Kara, , , | ||
| 0286 | Erg■n ErÓelebi | Wireless power transfer | 2013 Fall | Murat Suslu, , , | ||
| 0285 | Erg■n ErÓelebi | Spectrum analyzer using dsPIC | 2014 Spring | Mehmet Sevim, , , | ||
| 0284 | Erg■n ErÓelebi | Robotic arm design | 2013 Fall | Said úiftci, , , | ||
| 0283 | Erg■n ErÓelebi | PIC based Temperature and humidity Monitoring on GSM | 2013 Fall | Elzem Misirli, , , | ||
| 0282 | Erg■n ErÓelebi | PLC based automated car parking | 2013 Fall | Utku Coşgun, Ezgi G■zelk■Ó■k, Ozan Kaya, | ||
| 0281 | Celal Koraşlı | Negative ion generator and detector | 2013 Fall | S■leyman Barış Akg■nd■z, Ahmet Eren, , | ||
| 0280 | Rauf Mirzababayev | Human heat as a light source. | 2013 Summer early | Elif KılıÓ, Eray KılıÓ, , | ||
| 0279 | Rauf Mirzababayev | System for the measurement and display of acoustic noise level. | 2013 Fall | Yunus Duygu, Mahmut Ersin ErÓin, , | ||
| 0278 | Vedat Karslı | Three dimensional controlling of a graphic figure drawn on the monitor of a PC with a data taken from a microcontroller through USB port. | 2013 Fall | Zuberi Chambali, Hashim Khamis, , | ||
| 0277 | Tolgay Kara | False start detection via image processing for sprint races | 2013 Fall | Ali Ozan Akbey, Erhan Tekli, , | ||
| 0276 | Tolgay Kara | Electronic false start detector for sprint races | 2013 Summer | Pınar úiftÓi, Batuhan Şenlen, Ahmet Turnalı, | ||
| 0274 | Ahmet UÓar | Design PID Control for Position Control of AC motor | 2014 Spring | Mehmet Ekinci, InanÓ G—rg■n, H■seyin Mizmizlioğlu, | ||
| 0273 | Ahmet Uçar | Observer Based State Feedback Position Control of a DC Motor | 2015 Fall | Anıl Erenkara, Arife Çakı, Salih Dağdur, | ||
| 0272 | Ahmet Uçar | Complete State Feedback Position Control of a DC Motor by the pole placement method | 2015 Fall | Aykut Orak, Bedrettin Kanpak, Mohamed Zafir Mohamed Zubair, | ||
| 0271 | Ahmet Uçar | Control of a DC Motor based on Zeigler-Nichols Tuning Methods | 2015 Fall | Hasan Aslan, Barış Aşkın, Okan Büyüktepe, | ||
| 0270 | Ahmet Uçar | Design and Control of Inverted Pendulum on a Cart system | 2014 Fall | Yıldırım Can Akgünel, Gökhan Duru, Aykut Görkem Gelen, | ||
| 0269 | Ahmet UÓar | Conventional Control of Magnetic Levitation System | 2013 Fall | Abdullahi Adamu, Emine úalman, Ertuğrul Sert, | ||
| 0268 | Ahmet Uçar | Design a platform to implement digital control for electromechanical systems. | 2016 Fall | Rabia Kucuk, Esra Gocer, Abide Gokce, | ||
| 0267 | Ahmet Uçar | Design a Data Acquisition (DAQ) System to be used with data Acquisition Toolbox and Instrument Control Toolbox of MATLAB/Simulink. | 2015 Fall | Meral Yıldırım, Kübra Yeniçeri, Oğuz Özdemir, | ||
| 0266 | Ahmet Uçar | Design a Data Acquisition and Distribution System communicated with MATLAB/Simulink. | 2015 Fall | Neslihan Top, Mert Filiz, , | ||
| 0265 | Tolgay Kara | Electric circuit model of the human body | 2013 Summer | Mazlum Ferhat İnce, , , | ||
| 0264 | Vedat Karslı | A laser diode paper cutter controlled by a microcontroller. | 2013 Fall | Emre Eroğlu, Ali Telek, , | ||
| 0262 | Vedat Karslı | The use of a GPS module using a microcontroller | 2013 Summer early | Hasan YalÓın, Hazal Yılmaz, , | ||
| 0261 | Vedat Karslı | Design and construction for a Quadcopter | 2013 Fall early | Mesut G■rg—z, D—nd■ úatal, Ahmet øks■z, | ||
| 0260 | Vedat Karslı | The use of gyroscope using a microcontroller | 2013 Fall | Muhittin Cevher, Emre Kesen, Mustafa Yavuz, | ||
| 0257 | Serkan øzbay | Design of a vending machine prototype | 2013 Summer early | Burak Oğuz Mızrak, Mehmet Vakıf Soydan, , | ||
| 0256 | Nuran Doğru | Pulse oximeter and heart rate meter | 2013 Summer early | Yusuf øzkaya, Duygu Şeker, , | ||
| 0255 | Tolgay Kara | A warning system for the deaf | 2013 Summer | Ertuğrul K—lemen, İhsan Şener, , | ||
| 0254 | Serkan øzbay | Metal detector | 2013 Summer | Ahmet Serhat KırÓıl, Murat Bozgeyik, , | ||
| 0252 | Sema Kayhan | FPGA-based image processing | 2013 Summer early | Ufuk Ozer, Aksen Kilinc, , | ||
| 0248 | Vedat Karslı | Secure GSM relay activation | 2013 Summer early | Mustafa Ayhan, Muhammet Cihat Mumcu, , | ||
| 0247 | Vedat Karslı | Data collection from 5 points to a central controller unit and PC display | 2014 Spring | Serkan Derin, Emre EkmekÓi, Anıl Saygılı, | ||
| 0246 | Vedat Karslı | Design and construction of a bicycle electrical tyre-motor driver | 2013 Fall | H■seyin Polat, Altan Énl■, , | ||
| 0245 | Nuran Doğru | A UPS system | 2013 Spring | Nurettin Yiğit, Muhammet Furkan K■Ó■k, , | ||
| 0244 | Sema Kayhan | PLC controlled two axes ceiling crane | 2013 Spring | Mehmet Nur Cantaşdemir, ømer Fikri Duran, Devlet Yaşar, | ||
| 0243 | Rauf Mirzababayev | LPG gas GSM alarm | 2013 Spring | Hanife Esra Kasap, Nafiz Oker, , | ||
| 0242 | Erg■n ErÓelebi | Development of RGB LED PWM driver for high power LEDs (I) | 2013 Spring | ømer G■ner, , , | ||
| 0241 | Rauf Mirzababayev | Methane gas detector | 2013 Spring | Şahin Şıkoğlu, G—khan úelik, , | ||
| 0240 | Tolgay Kara | Autonomous rescue robot | 2013 Spring | Muhammet Berdici, İsmail Terzi, Mehmet Mete Yılmaz, | ||
| 0239 | Arif Nacaroğlu | An autonomic robot | 2013 Fall | Zeynel Bay, Adnan Demir, Ahmet D■k■nl■, | ||
| 0238 | Tolgay Kara | An autonomic robot [I] | 2013 Spring | M■slime Altun, Ismail úetin, Mustafa KılıÓ, | ||
| 0237 | Savaş UÓk■n | Design and construction based on RFID | 2013 Spring | Mahmut úiÓek, , , | ||
| 0235 | Celal Koraşlı | Extracting heat from underground power transmission cables | 2013 Spring | Hamit Orhan, Vedat Onatlı, , | ||
| 0234 | Andrew Beddall | An autonomic robot [group IV] | 2012 Fall | İbrahim Arslan, Ahmet Gevri, Mehmet Ali G■ll■, | ||
| 0233 | Taner İnce | Simple plotter (III) | 2012 Fall | Serkan KılıÓ, Şaban Koyuncu, , | ||
| 0232 | Tolgay Kara | Simple plotter (II) | 2012 Fall | Y■ksel Yeşilyurt, ømer G■ner, , | ||
| 0231 | Andrew Beddall | Simple plotter (I) | 2012 Fall | Eyyup B—l■kbaş, A. Hamdi KoÓ, , | ||
| 0230 | Celal Koraşlı | Design and construction of an electromagnetic device to aid bone fracture healing | 2012 Fall | G—khan Yılmaz, Soner Fidan, , | ||
| 0229 | Erg■n ErÓelebi | Implementation of GPS & GSM based Real Time Vehicle Tracking System (II) | 2012 Fall | Eray Bucak, Okan B—ge, , | ||
| 0228 | Savaş UÓk■n | Prepare a program for the design of multisection Chebyshev transformers (II) | 2012 Fall | Veysel G■zel, , , | ||
| 0227 | Rauf Mirzababayev | Design and construction of a Hydrogen gas detector (I) | 2012 Fall | Yakup B■y■kbayram, G—kcan Duman, , | ||
| 0226 | Rauf Mirzababayev | Passive alarm device (I) | 2012 Fall | K■rşad G■ler, , , | ||
| 0225 | Nuran Doğru | A robot pushing a table tennis ball up a slope (II) | 2012 Fall | Veysi Aydın, Onur Guneş, , | ||
| 0224 | Nurdal Watsuji | FM radio receiver controlled by a micro-controller (II) | 2012 Fall | Ahmet Binol, Hasan Kalay, , | ||
| 0223 | G—lge øğ■c■ | Attendance via wireless (II) | 2012 Fall | Zehra Yiğit, Belma Fergar, , | ||
| 0220 | Sema Kayhan | Implementation of digital watermarking algorithm using FPGA | 2012 Fall | ønder Polat, , , | ||
| 0219 | Andrew Beddall | Remote home monitoring and control over the Internet | 2012 Fall | Birol Ilker Arslan, Ramazan Sevim, Turgut Karadağ, | ||
| 0218 | Vedat Karslı | Data collection from multiple points to a central controller unit and PC display (I) | 2012 Fall | Ahmet Korkmaz, Sibel Kaya, , | ||
| 0217 | Vedat Karslı | Collecting and storing GPS position information on a PC | 2012 Fall | Aykut Kaşkaya, Asım Can Hosgun, , | ||
| 0216 | Vedat Karslı | Data collection from multiple points to a central controller unit and PC display (II) | 2012 Fall | Ferhat Doğan, Nur úeker, , | ||
| 0215 | Sema Kayhan | A PLC controlled sorting system | 2012 Fall | Selim Emre G■nay, Koray Şaban, , | ||
| 0214 | Erg■n ErÓelebi | Improvement in supervisory control and data acquisition system for liquid tanks | 2012 Fall | Yunus Doğan, , , | ||
| 0213 | Erg■n ErÓelebi | Converting from text to speech | 2013 Spring | Hasan Elmaoğlu, , , | ||
| 0212 | Erg■n ErÓelebi | Control of a railway system | 2012 Fall | Emre øzkorkmaz, Ali Z■lfikaroğlu, , | ||
| 0211 | Erg■n ErÓelebi | Design and Implementation of PLC controlled pneumatic arm for material handling | 2012 Fall | Yunus úetin, Semih YavuzkılıÓ, Tayfun úelik, | ||
| 0210 | Erg■n ErÓelebi | Design and Implementation of PLC based automatic bottle filling station | 2013 Spring | S■leyman Aslan, Mustafa øzdemir, , | ||
| 0209 | Erg■n ErÓelebi | Implementation of GPS & GSM based Real Time Vehicle Tracking System (I) | 2012 Fall | İzzettin úifteg—z, Yaşar Ayyıdız, , | ||
| 0208 | Serkan øzbay | Design of an actuator driven by servomotor | 2012 Fall | Menekşe Dursun, øzkan Alkış, , | ||
| 0207 | Sadettin øzyazıcı | Design of FM remote transmitter and receiver (II) | 2012 Fall | Sedat Demir, Eray Hazer, , | ||
| 0206 | Nurdal Watsuji | FM radio receiver controlled by a micro-controller (I) | 2012 Fall | Soner Kısak■rek, Ahmet Giray Yıldırım, , | ||
| 0205 | G—lge øğ■c■ | Attendance via wireless (I) | 2012 Fall | Doğuş Bayır, Abdurrahim Bavli, , | ||
| 0204 | Rauf Mirzababayev | Design and construction of a Hydrogen gas detector (II) | 2012 Fall | Muhammet K■rşat Eroğlu, Ozan Gani Tattan, , | ||
| 0203 | Rauf Mirzababayev | Passive alarm device (II) | 2012 Fall | Mehmet Karadağ, , , | ||
| 0202 | Serkan øzbay | Eye tracking system | 2012 Fall | Adam Iddi M Watima, Zuberi Juma Ramadhan, , | ||
| 0201 | Serkan øzbay | Vacant parking space detection | 2012 Fall | Emre Işık, , , | ||
| 0200 | Sema Kayhan | A real-time human tracking and security system in the home environment | 2012 Fall | Cansu Kınalı, Adem İnce, , | ||
| 0199 | Savaş UÓk■n | VIP Parking Management System using RFID | 2012 Fall | Şafak G■naydın, Ezgi Kırmızı, , | ||
| 0198 | Savaş UÓk■n | Prepare a program for the design of multisection Chebyshev transformers (I) | 2012 Fall | İlyas Kara, , , | ||
| 0196 | Sadettin øzyazıcı | Design and construction of an standalone GPS receiver | 2012 Fall | Nurullah Acıkg—z, , , | ||
| 0195 | Sadettin øzyazıcı | Design and construction of ultrasonic anemometry | 2012 Fall | ømer Uğun, Resul Pısıl, , | ||
| 0194 | Sadettin øzyazıcı | Design of FM remote transmitter and receiver (I) | 2012 Fall | G—khan øzerli, Ahmet Nalbantoğlu, , | ||
| 0192 | Ahmet Uçar | Design and control of a ball on a beam balancer system | 2014 Fall | Ömer Aydin, Kemal Karpınar, Ahmet Kural, Ercan Macit | ||
| 0190 | Ahmet UÓar | Conventional continuous time control of a magnetic levitation system | 2012 Fall | Adamu Abdulllahı, H■seyin KılıÓ, Turgut KoÓ, | ||
| 0189 | Ahmet UÓar | Speed control of an AC motor | 2014 Spring | Mustafa Kalkan, Harun Y■kcel, , | ||
| 0188 | Ahmet UÓar | Position control of an AC motor | 2012 Fall | Tamer Karag—z, Enes KoÓ, , | ||
| 0187 | Ahmet Uçar | Observer-based state feedback position control of a DC motor: The observer and controller gains design by the pole placement method | 2016 Fall | Gamze Cirit, Meryem Sila Ozdemir, Sinem Ekin Sahin, | ||
| 0186 | Ahmet Uçar | Digital control of a DC motor | 2015 Fall | Yusuf Güngör, Onur Kırat, , | ||
| 0185 | Ahmet Ucar | Full state feedback position control of a DC motor: the controller gains design by the pole placement method | 2016 Spring | Edibe Eda Bingol, Emine Bilgili, , | ||
| 0184 | Ahmet Uçar | Position control of a DC motor: PID control parameter design based on Zeigler-Nichols tuning rules | 2016 Spring | Ismail Turk, Mustafa Cabuk, , | ||
| 0183 | Ahmet Uçar | Position control of a DC motor: control parameter design by the frequency response method | 2015 Spring | Mustafa Yıldız, Hüseyin Kılıç, , | ||
| 0182 | Ahmet UÓar | Position control of a DC motor: control parameter design by the root locus method | 2013 Spring | Hasan Gezginci, Bilal øztekin, , | ||
| 0181 | Nuran Doğru | A robot pushing a table tennis ball up a slope (I) | 2012 Fall | Mehmet Ali G■ner, Sedat G—ksel, , | ||
| 0180 | Tolgay Kara | A multi-robot system with wireless communication | 2012 Fall | Batuhan øzetin, Muharrem BaÓ, , | ||
| 0179 | Tolgay Kara | Arm-controlled two-link planar manipulator | 2012 Fall | Arif Peker, Sedat Uğuş, , | ||
| 0178 | Tolgay Kara | Design of a control unit for unmanned air vehicle (UAV) | 2012 Spring | Mustafa Yağmur, , , | ||
| 0177 | Savaş UÓk■n | RFID gate entry system | 2012 Spring | Cihan Nişancı, Eda T■rkan, , | ||
| 0176 | Berrin Susluoğlu | Spinning LED display | 2012 Spring | H■seyin Aksu, , , | ||
| 0175 | Arif Nacaroğlu | Information transmission by laser | 2012 Spring | Figen úoban, , , | ||
| 0174 | Tolgay Kara | Development of a flex sensor glove | 2012 Spring | øzlem Ağg■l, Elif Y—ndem, , | ||
| 0173 | Nuran Doğru | Line Following Robot | 2012 Spring | Murat Keskin, , , | ||
| 0172 | Serkan øzbay | Color sensor | 2012 Spring | øzcan Bulut, Seyithan Babayiğit, , | ||
| 0171 | Arif Nacaroğlu | Solar heated power generator | 2012 Spring | Orhan Karakoyun, Halil D■ndar, , | ||
| 0170 | Arif Nacaroğlu | 3-D shape identifier | 2012 Spring | Selda Énsever, , , | ||
| 0169 | Serkan øzbay | Gas detection system | 2012 Spring | Makbule úelebi, , , | ||
| 0168 | Sema Kayhan | Design of conveyor system using SCADA | 2012 Spring | Musa Başad Metin, , , | ||
| 0167 | G—lge øğ■c■ | Wireless optical transceiver | 2012 Spring | ømer Ekici, Aykin Arifoğlu, , | ||
| 0166 | Tolgay Kara | A proximity detector for the blind | 2012 Spring | Abdullah Bilbay, , , | ||
| 0165 | G—lge øğ■c■ | Underwater communication by ultrasound | 2012 Spring | Mehmet Can Gezer, İsmail G■n, , | ||
| 0164 | Rauf Mirzababayev | Digital voltmeter for analog voltage measurement | 2012 Spring | Serkan Atay, İbrahim Demirkıran, , | ||
| 0163 | Serkan øzbay | Early fire detection system | 2012 Spring | Nurettin ErÓin, , , | ||
| 0162 | Erg■n ErÓelebi | Remote-controlled target strike | 2012 Spring | Yasin İpekoğlu, , , | ||
| 0161 | Andrew Beddall | Bicycle speedometer | 2012 Spring | Nasır Y■ksel, İlker Bayrakcı, , | ||
| 0160 | Serkan øzbay | Message display system | 2012 Spring | Yasin G—r, Arif Duramaz, , | ||
| 0159 | Nuran Doğru | Patient monitor | 2012 Fall | İlknur Tuzlupınar, Nuri úamlıbel, , | ||
| 0158 | Sadettin øzyazıcı | Design and construction of ultrasonic anemometry II | 2012 Spring | İbrahim Isık, Ertuğrul øzkan, , | ||
| 0157 | Sadettin øzyazıcı | A microcontroller based CO2 meter II | 2012 Spring | Sami Arslan, Mustafa Suat Aydın, , | ||
| 0156 | Serkan øzbay | Handicapped person\caretaker communication system | 2012 Spring | Mesut T■rk, , , | ||
| 0155 | Sema Kayhan | Design of Home Security System (HSS) | 2012 Spring | Mesut Şahan, Seyhan Ayata, , | ||
| 0154 | Sema Kayhan | A PLC-controlled ball in a labyrinth | 2012 Spring | İbrahim Hakkı Kayserilioğlu, Murat Oğuzhan Durucan, , | ||
| 0153 | Rauf Mirzababayev | pH meter | 2012 Spring | İdris G■ler, Nurullah Albayrak, , | ||
| 0152 | Rauf Mirzababayev | Electronic thermometer | 2012 Spring | Faruk Avcu, Murat úelikkaleli, , | ||
| 0151 | Rauf Mirzababayev | pH meter | 2012 Spring | Muhammed K■Ó■k, H■seyin Fatih S—ğ■t, , | ||
| 0150 | Rauf Mirzababayev | Solar heater | 2012 Spring | Can KaÓan, Sedat Kazaylek, , | ||
| 0149 | Nurdal Watsuji | Shoe pace monitor | 2012 Spring | Emre Hadımoğulları, Serdar Yılıdrım, , | ||
| 0148 | Erg■n ErÓelebi | Design and construction of a stair-climbing robot | 2012 Spring | Ferhat øzkınacı, Burak İlhan, , | ||
| 0147 | Erg■n ErÓelebi | PIC based solar tracking system using stepper motors | 2012 Spring | ømer Mete Atalay, H■seyin Korkmaz, , | ||
| 0146 | Erg■n ErÓelebi | Development of RGB LED PWM driver for high power LEDs (II) | 2013 Spring | Mert Cemal úağlar, , , | ||
| 0145 | Erg■n ErÓelebi | Improvement of a machine for inspection of textile defects | 2012 Spring | Yusuf B■y■kdere, Ali G■Ó, , | ||
| 0144 | Erg■n ErÓelebi | Supervisory control and data acquisition system for liquid tanks | 2012 Spring | Mustafa Bazdoğan, Ahmet Mert Sevgili, , | ||
| 0143 | Savaş UÓk■n | Design and test a three-Section half-wave bandpass filter | 2012 Spring | Ahmet Hamdi Başg—zl■, , , | ||
| 0142 | Savaş UÓk■n | Design and test a two-section half-wave filter | 2012 Spring | Abdurrahman G—nenÓ, , , | ||
| 0141 | Nuran Doğru | Digital Thermometer | 2012 Spring | Ahmet øzkan, Murat BayÓelebi, , | ||
| 0140 | Andrew Beddall | Random number circuit | 2012 Spring | Muhammed Emin Piran, Merve Demirici, , | ||
| 0139 | Sadettin øzyazıcı | A microcontroller based CO2 meter | 2012 Spring | Cihan L■tfı Akmil, Salih Lafcı, , | ||
| 0138 | Sadettin øzyazıcı | Design and construction of ultrasonic anemometry | 2012 Spring | Emir Karaaslan, Mehmet Serkan UzunÓam, , | ||
| 0136 | Tolgay Kara | A wearable multisensor device for vital signals | 2012 Fall | İbrahim úelebi, Kazım Demir, Tahsin øzden, | ||
| 0135 | Nuran Doğru | Liquid level control system for an array of tanks | 2011 Fall | Ekrem Seyfullah Ağcabay, Taner Aribaş, , | ||
| 0134 | Taner İnce | An autonomic robot [group III] | 2012 Fall | Bayram Karahan, Orhan G■nd■z, Ercan Virdil, | ||
| 0133 | Tolgay Kara | An autonomic robot [group II] | 2012 Fall | Şevket Şimşek, Alişan KekeÓ, Serdar Yeşil, | ||
| 0132 | Andrew Beddall | An autonomic robot [group I] | 2012 Fall | S■leyman Demir, Gizem Karahan, , | ||
| 0131 | Tolgay Kara | Bomb disposal robot | 2011 Fall | Ali SelÓuk, Haydar G■reli, , | ||
| 0130 | Rauf Mirzababayev | Distance measurements using the ultrasound waves | 2011 Fall | Hakan Derecik, , , | ||
| 0129 | Sema Kayhan | PLC training kit | 2011 Fall | Mahmut Tatar, , , | ||
| 0128 | Sema Kayhan | Intelligent Home System-Control by PLC/PIC | 2011 Fall | Derya İnce, , , | ||
| 0127 | Sema Kayhan | Metal detector robot with mechanical sensing switches | 2011 Fall | Semih Yıluğur, Adem Taşın, , | ||
| 0126 | Celal Koraşlı | Speed and directional control of a hovercraft | 2012 Spring | ønder Şahinoğullarıgil, Mehmet úekl■, , | ||
| 0125 | Vedat Karslı | Controlling of a servo motor forward and backward by way of a PC | 2012 Fall | Yunus Emre Baygeldi, Mehmet G■ney, M. Mert Alag—z, | ||
| 0124 | Rauf Mirzababayev | Intrusion control | 2011 Fall | Seyhan Tural, Levent Kızıl, , | ||
| 0123 | Rauf Mirzababayev | Local cooler for desert places | 2011 Fall | Saadet G■ls■m AÓıkg—z, Sevilay Akca, , | ||
| 0122 | Vedat Karslı | A remote-control security toy car by PC | 2011 Fall | Taha Emre T■mt■rk, , , | ||
| 0121 | Savaş UÓk■n | Design a branch-line directional coupler in stripline form | 2011 Fall | Yakup Karataş, , , | ||
| 0120 | Serkan øzbay | Microcontroller-based combination lock for multiusers | 2011 Fall | Kadir Kaynar, , , | ||
| 0119 | Serkan øzbay | Anti-sleep driving alarm system | 2011 Fall | Yavuz Barutcu, H■seyin Toprak, , | ||
| 0118 | Sadettin øzyazıcı | Internet radio | 2011 Fall | Ahmet Atam, İsmail øzen, , | ||
| 0117 | Sadettin øzyazıcı | Wireless pulse sensor | 2011 Fall | Samat Turdumamatov, Aliser Abdulhayev, , | ||
| 0116 | Erg■n ErÓelebi | Improvement in design and construction of a machine for inspection of textile defects | 2011 Fall | øzkan Sarikaya, Kemal Arslan, Emrah Yilmaz, | ||
| 0115 | Erg■n ErÓelebi | Improvement of a pistachio sorting machine | 2011 Fall | G■lsemin Ésen, Kader Temel, , | ||
| 0112 | Ahmet UÓar | Speed control of an AC motor | 2012 Spring | úağrı G—kahmetoğlu, Muhittin Metin, , | ||
| 0111 | Ahmet UÓar | Position control of a DC motor | 2011 Fall | Tuğba Bozdoğan, K■bra Şeker, , | ||
| 0110 | Sema Kayhan | A speech controlled car | 2011 Summer | Emrah Irmak, Mehmet G—kÓe, , | ||
| 0109 | Tolgay Kara | Hearing protection with variable frequency active noise reduction | 2011 Fall | Adem Dokg—zl■, Yavuz Selim Ağzıbağlı, , | ||
| 0107 | Vedat Karslı | Speed measurement of a rotational induction motor | 2011 Fall | Meral Aslan, , , | ||
| 0106 | Nuran Doğru | PC to PC fiber optic communication | 2011 Summer | Mehmet Ali Ést■ner, Hasan İzmitligil, , | ||
| 0105 | Tolgay Kara | Electronic assistant football referee to detect off-side | 2011 Spring | Faruk BahÓeci, , , | ||
| 0104 | Rauf Mirzababayev | Gas leak detector | 2011 Spring | Mustafa Arslan, Mehmet Şahan, , | ||
| 0103 | Rauf Mirzababayev | Combustion products detector | 2011 Spring | Sinan Seven, Rıdvan Aslan, , | ||
| 0102 | Savaş UÓk■n | Design of Multisection Chebyshev Transformers | 2011 Spring | Burak K—se, , , | ||
| 0100 | Vedat Karslı | Design and construction of a prototype levitation control system using dsPIC30F4011 | 2012 Fall | Şeyda Sağır, Serhat Tulu, , | ||
| 0099 | Sema Kayhan | Visual tracking system | 2011 Spring | Selami Gemalmaz, Bilgi Ozan Aky■z, , | ||
| 0098 | G—lge øğ■c■ | Puzzle-solving robot | 2011 Spring | Mehmet Ali Karakurt, Pena Japarov, Emrah Berberoğlu, | ||
| 0097 | Arif Nacaroğlu | Record (vinyl) to CD converter | 2011 Spring | Selim úolak, , , | ||
| 0096 | Arif Nacaroğlu | Target finder in 3-D | 2011 Spring | Emrah Kaplan, Ramazan øzkan, , | ||
| 0095 | Sadettin øzyazıcı | Design and construction of a Stiquito robot | 2011 Spring | Serhan NariÓi, Celalettin Rasim Oğuzman, , | ||
| 0094 | G—lge øğ■c■ | Cars communicating on a road | 2011 Spring | Mustafa İmrak, Mehmet KılıÓ, , | ||
| 0093 | Erg■n ErÓelebi | Design and construction of a machine for inspection of textile defects | 2011 Spring | Metin Atayoğlu, Ersin G—kdağ, øzg■r Yıldız, | ||
| 0092 | Erg■n ErÓelebi | Design and construction of a Pistachio sorting machine | 2011 Spring | Abdulkadir G—zuoğlu, Muharrem Balci, , | ||
| 0091 | Erg■n ErÓelebi | Implementation of G.711 8 kHz A-law and μ-law coding algorithm | 2011 Spring | Mehmet Dev, , , | ||
| 0090 | Tolgay Kara | Automatic tracking and distance control for vehicles | 2011 Spring | Ayşenur Emrullah, Mehmet Akif ErkoÓ, , | ||
| 0089 | Nuran Doğru | Patient Monitor | 2011 Spring | Selma Eroğlu, Selma Aslan, , | ||
| 0088 | Nurdal Watsuji | Robot ball collector | 2011 Spring | øzg■n Balkaya, Onur úevik, Şehmus Bayar, | ||
| 0087 | Andrew Beddall | Two-dimensional tracking of a person walking across a room | 2011 Spring | Halil Kelo, Emrah Kurt, , | ||
| 0086 | Andrew Beddall | Measurement of double-slit interference fringes | 2011 Spring | Yunus Şahin, Kayhan Sezer, , | ||
| 0085 | Andrew Beddall | Design and construction of an electronic weighing scale | 2011 Spring | Yasin Emre Durmuş, İlyas Firincioğulları, , | ||
| 0084 | Tolgay Kara | Balloon-bouncing robot | 2011 Spring | C■neyt G—lelioğlu, Muhammed Oktay, , | ||
| 0083 | Tolgay Kara | Voice control for Matlab | 2010 Fall early | Oğuzhan İpin, , , | ||
| 0081 | G—lge øğ■c■ | Comparison of OFDM technique and CDMA in wireless systems [this is a design-only project] |
2010 Fall | Doğan Pekoz, , , | ||
| 0078 | Vedat Karslı | Design and construction of a prototype levitation control system using dsPIC30F4011 | 2010 Fall | Hamit OlğaÓ, Fatih Yapıcı, , | ||
| 0077 | Rauf Mirzababayev | Voice controlled command in house lighting | 2010 Summer | Aşkın Samet Atalar, Ertuğ Babacan, , | ||
| 0075 | Celal Koraşlı | Road lighting using solar power | 2010 Spring | Necati Deveci, Ali Yildizhan, , | ||
| 0074 | Savaş UÓk■n | Design and test a three-section half-wave filter | 2010 Spring | C■neyt Aktaş, , , | ||
| 0073 | Andrew Beddall | Object location by trilateration | 2010 Fall | Şehmus Deniz, Hasan Bayram, , | ||
| 0072 | Sema Kayhan | A PLC controlled bottle filling system | 2010 Spring | Muhammet Atalay T■rkeş, , , | ||
| 0071 | Savaş UÓk■n | Design and construction of an electrostatic precipitator | 2010 Fall | Cihan İyimutaf, , , | ||
| 0070 | Sema Kayhan | A car license plate recognition system | 2010 Spring | Musa Bute, , , | ||
| 0069 | Nuran Doğru | Simple radar design and implementation | 2010 Spring | Ufuk Şan, , , | ||
| 0068 | Celal Koraşlı | Design of sinusoidal-wave high-power signal generator for ground resistance measurement | 2010 Fall | Mehmet Şefik Kayra, Seyithan Kaya, , | ||
| 0067 | Tolgay Kara | Coupled tank level control system | 2010 Summer | Yakup Altunkaynak, Fevzi Nebioğlu, , | ||
| 0062 | Vedat Karslı | Design and construction of a stepping motor driver and control circuit | 2010 Spring | Mahmut Karakaş, Ramazan Demir, , | ||
| 0061 | Vedat Karslı | A remote controlled toy car | 2010 Spring | Onur Terkesli, Sedat Cicek, , | ||
| 0060 | Vedat Karslı | Design and construction of 3 phase current measurement and display circuit controlled by a microcontroller (and/or DSP). | 2010 Spring | øzg■r Kayhan, ønder øzcan, , | ||
| 0059 | Vedat Karslı | Design and construction of a 500 W converter controlled by a microcontroller | 2010 Fall | Durmuş Denizli, Kemal G—z■b■y■k, , | ||
| 0058 | Vedat Karslı | Design and construction of an anemometer speed measurement, display unit, using a microcontroller and PC | 2010 Spring | Ulaş Alacabağ, ømer Altun, Cemal Tozmaz, | ||
| 0057 | Vedat Karslı | Design and construction of two wireless RF microcontrolled units to transfer temperature and speed data | 2009 Fall | Yunus Ozyurt, Kemal Erdoğan, , | ||
| 0056 | Vedat Karslı | Design and construction of a 0-30 V, 0-5 A adjustable power supply using a microcontroller and display unit | 2009 Spring | ømer Faruk øzayd»n, TuÞrul Metin, , | ||
| 0055 | Vedat Karslı | Design and construction of a display unit using a microcontroller and MMC card | 2009 Fall | Mehmet Baylan, Osman Kazan, , | ||
| 0054 | Vedat Karslı | Design and construction of a prototype levitation control system (say 200gr weight) using a microcontroller | 2010 Spring | Tanel Candemir, Erkan Deniz, , | ||
| 0052 | Tolgay Kara | An autonomous robotic spider | 2010 Spring | Mehmet Emin Acer, Cuneyt Yilmaz, , | ||
| 0051 | Tolgay Kara | A sound tracking car | 2010 Spring | Mahmut Kiriktir, , , | ||
| 0050 | Tolgay Kara | Design and construct a wearable "white stick" that aids the visually impaired as they walk. | 2009 Fall | Ali Cihan Sarsu, , , | ||
| 0049 | Tolgay Kara | Design and construct a motion sensitive security camera system with automatic tracking | 2010 Spring | Serdar K—seoğlu, Semih Tursun, Osman YeniÓeri, | ||
| 0048 | Nuran Doğru | PIC based remote control of house devices using DTMF (dual tone multi frequency) via telephone lines | 2009 Fall | Talat Keles, , , | ||
| 0047 | Sema Kayhan | Design and control a conveyor band to count and separate parts on it | 2010 Spring | Fuat Deger, , , | ||
| 0046 | Sema Kayhan | A line-following car | 2010 Spring | Adem Gedik, , , | ||
| 0045 | Sema Kayhan | Car parking control system | 2009 Fall | Erhan Ersoy, , , | ||
| 0044 | Sema Kayhan | Design and construction of a PLC controlled rig | 2009 Spring | Okan KolaÞasioÞlu, , , | ||
| 0043 | Sema Kayhan | A PLC controlled lift | 2009 Fall | Melike Bağcı, , , | ||
| 0041 | Savaş Uçkun | Design and test a directional coupler in X-band | 2009 Fall | Enise úoban, , , | ||
| 0040 | Sadettin øzyazıcı | POI alert employing GPS | 2010 Spring | L■tfı KılıÓ, Bertan Kahraman, , | ||
| 0039 | Sadettin øzyazıcı | Wireless pulse sensor | 2010 Spring | H■seyin úomruk, , , | ||
| 0038 | Sadettin øzyazıcı | Design of FM remote transmitter and receiver | 2009 Fall | Selim G■lhan, Memiş şıkşık, , | ||
| 0037 | Rauf Mirzababayev | Temperature and humidity measurements with a photocell as an energy source | 2010 Spring | G■nay Dengiz, Mehmet Ileri, , | ||
| 0036 | Rauf Mirzababayev | Velocity measurement using the doppler effect | 2010 Spring | Yaser IÓer, T■lin TunÓ, , | ||
| 0035 | Rauf Mirzababayev | A pulsemeter design for non invasive pulse measurement | 2009 Fall | Ergin Han Kızılay;, , , | ||
| 0034 | Rauf Mirzababayev | Wireless transmission of vibration signals | 2009 Spring | Okan ErdoÞan, Adem Y»lmaz, , | ||
| 0033 | Rauf Mirzababayev | Voice Communication via power line | 2010 Spring | Tarik Dağcı, , , | ||
| 0032 | Nurdal Watsuji | Intelligent wireless pedometer | 2010 Spring | øzden Parsak, Halil Karagedik, , | ||
| 0031 | Nuran Doğru | Wireless home security system with microcontroller | 2010 Spring | Ugur Uysal, Fatih Uysal, , | ||
| 0030 | Nuran Doğru | Digital voice recorder using microcontroller | 2010 Spring | Hamdi Besli, , , | ||
| 0029 | Nuran Doğru | Sending audio signals with a laser beam | 2010 Spring | Tuna Aslan, şuayip TURGUT, , | ||
| 0028 | Nuran Doğru | PC to PC laser communication | 2009 Spring | Fatih R. ú»kan, Muhammed Mekin, , | ||
| 0027 | G—lge øğ■c■ | Safety on the streets for the blind | 2010 Spring | Utku Akbas, Sultan Karaoğlan, , | ||
| 0026 | G—lge øğ■c■ | "Read out loud" device | 2010 Spring | Nihat Kartakuslu, Nafiz alkan Karahan, , | ||
| 0025 | G—lge øğ■c■ | Temperature regulator | 2009 Spring | Sait G■leÓ, , , | ||
| 0024 | Erg■n ErÓelebi | PIC-based musical doorbell | 2010 Spring | Abdullah úelebi, , , | ||
| 0023 | Erg■n ErÓelebi | PIC-based digital clock | 2010 Spring | Abdullah Taka, , , | ||
| 0022 | Erg■n ErÓelebi | Real time application of adaptive filter for noise elimination | 2010 Spring | Abdulhaluk Yararlı, , , | ||
| 0021 | Erg■n ErÓelebi | Design and implementation of improvements to a 900MHz GSM jammer | 2010 Spring | Ibrahim Sahin, , , | ||
| 0020 | Erg■n ErÓelebi | Real time implementation of an edge detection algorithm | 2010 Spring | Veli G—koglu, , , | ||
| 0019 | Erg■n ErÓelebi | GSM-900 mobile jammer design | 2009 Fall | Fatih Pazarlıoğlu, , , | ||
| 0018 | Erg■n ErÓelebi | Calculator design using PIC | 2009 Fall | Oğ■z Zeybek, , , | ||
| 0017 | Erg■n ErÓelebi | RF communication network design | 2009 Fall | Erg■n Menetlioğlu, , , | ||
| 0016 | Erg■n ErÓelebi | PIC development board | 2009 Spring | Mehmet úatalba±, , , | ||
| 0015 | Erg■n ErÓelebi | Radar system simulation program | 2009 Fall | Mustafa Bolat, , , | ||
| 0014 | Celal Koraşlı | A microcontroller based automatic sun tracker | 2010 Spring | Mesut Demir, Arda Kuş, , | ||
| 0013 | Celal Koraşlı | Power factor correction for domestic usage | 2010 Spring | Otgon Zandan, Erkan Gunes, , | ||
| 0012 | Celal Koraşlı | Reading and recording of sequential data | 2009 Fall | Ismail T■rk, Alparslan Tanis, , | ||
| 0010 | Celal Koraşlı | Inactivation of microorganisms in liquids under high voltage oscillatory pulses | 2010 Fall | Abdulkadir Korkmaz, , , | ||
| 0009 | Arif Nacaroğlu | Recorder of pauses in breathing during sleep | 2012 Spring | øzgecan Ekim, , , | ||
| 0008 | Arif Nacaroğlu | Detecter of long pauses in breathing during sleep | 2010 Spring | Abdullah úalışkan, , , | ||
| 0007 | Arif Nacaroğlu | Target tracker on a plane surface | 2010 Fall | Fatma Bakır, Meryem Kabasakal, , | ||
| 0006 | Arif Nacaroğlu | Holding robot | 2009 Fall | M. Ali Kalendar, øzan G■l, , | ||
| 0005 | Tolgay Kara | Mathematical modeling and optimal control of a greenhouse process (design only) | 2010 Spring | Mesut Coşkun, , , | ||
| 0004 | Andrew Beddall | Random number circuit | 2010 Spring | Ali Recai úelik, Muhammet øzdemir, , | ||
| 0002 | Andrew Beddall | An intelligent traffic light flow controller | 2010 Spring | Hasan Toks—z, , , | ||
| 0001 | Andrew Beddall | Electronic timer for a "simple pendulum" experiment | 2010 Spring | Kudbettin Altun, , , |
Details
| 1290 | Mehmet Demir | Fingerprint-Recognition Based Smart Locking System | 2025 Spring | Ibrahim Aslanpay, Yahya Faruk KáÝláÝnûÏ, Ali Aslan, , , | |||
|
Title: Fingerprint-Recognition Based Smart Locking System Overview of the project 1. Developing a high-security access control system using fingerprint recognition technology. 2. Eliminating the need for users to carry physical keys or remember passwords. 3. Providing an easy-to-use, fast, and reliable authentication system. What is the design in this project? The design of the project includes the following components and workflow: 1. Hardware Design: 2. Software Design: 3. System Workflow: What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate? 1. Environmental Conditions: 2. User Interaction: 3. Maintenance: What are the specific criteria for the success of the project? 1. Functional Prototype: 2. Accuracy: 3. Response Time: 4. User Satisfaction: 5. Documentation: Division of Tasks: Student 1: Student 2: Student 3: Specific components/tools 1. Hardware: 2. Software: 3. Tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1288 | Mete Vural | PWM control of a universal motor | 2025 Spring | Muhammed Mustafa Ceylan, Ahmet Piliz, Bû¥nyamin Gû¥rler, , , | |||
|
Title: PWM control of a universal motor Overview of the project This project aims to implement Pulse Width Modulation (PWM) control to regulate the speed of a universal motor. Universal motors are versatile and can operate on either AC or DC power, making them ideal for various applications, including household appliances and power tools. However, precise speed control is essential for optimal performance and efficiency. In this project, an Arduino microcontroller will be used to generate PWM signals to control the universal motor's speed. The PWM technique involves varying the duty cycle of the signal to adjust the average voltage supplied to the motor, effectively controlling its speed. By fine-tuning the PWM parameters, the project will demonstrate the ability to achieve smooth and responsive speed control. The setup will include a feedback mechanism, such as an optical encoder or a tachometer, to monitor the motor's speed and adjust the PWM signal accordingly. This closed-loop control system will ensure accurate and stable operation. What is the design in this project? The design in this project is an Arduino based PWM control scheme for a universal motor. What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate? The control system should operate under room temperature conditions. What are the specific criteria for the success of the project?
Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 1287 | Mete Vural | Implementation of PID controller on Arduino for speed control of a DC motor | 2025 Spring | Salim AydáÝn, Furkan Ozdinc,Miray Colakoglu, , , | |||
|
Title: Implementation of PID controller on Arduino for speed control of a DC motor Overview of the project The Proportional-Integral-Derivative (PID) controller is a widely used control loop feedback mechanism in industrial control systems, offering robustness and accuracy in maintaining desired system behavior. This project focuses on designing and implementing a PID controller on an Arduino microcontroller to achieve precise speed control of a DC motor. In this project, the Arduino board will be programmed to serve as the controller, utilizing the PID algorithm to adjust the motor's speed based on real-time feedback. The setup includes an encoder to measure the motor's speed and provide feedback to the controller. An LCD or similar one can be used to display the motor speed. By tuning the PID parameters (proportional, integral, and derivative gains), the system can minimize speed fluctuations and ensure stable operation. What is the design in this project? The design in this project is an Arduino based PID speed controller for a DC motor. What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate?
What are the specific criteria for the success of the project?
Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 1285 | Ergun Erçelebi | Remote Speed Control of BLDC DC Motors for Drones | 2025 Spring | Melih Malyemez, Tahsin Demir, Rasim Budak, , , | |||
|
Title: Remote Speed Control of BLDC DC Motors for Drones Overview of the project In this project, a remotely controllable driver circuit will be designed to drive brushless DC (BLDC) motors used in drones. The remote control distance is planned to be more than 100 meters. For this reason, user preferences will be transmitted to the microcontroller via a control console operating with an RF signal. The microcontroller will generate the pulse width modulation (PWM) waveform required to drive the BLDC motor at the desired speed. The details of the project will be shared at a meeting to be held. What is the design in this project?
What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate?
What are the specific criteria for the success of the project? The project outcome will be considered successful if it operates within the constraints specified in the constraints section.
The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1278 | Seydi Kaçmaz | Smartphone-Based Vehicle Paint Inspection Using UV Light | 2025 Spring | KazáÝm Can Balkan,TaráÝk Kolutek, Soltan Nazarov, Muhammed Kaya, , , | |||
|
Title: Smartphone-Based Vehicle Paint Inspection Using UV Light Overview of the project This project aims to develop a smartphone-based system for detecting inconsistencies in vehicle paint using ultraviolet (UV) light. The system will help identify repainting, scratches, and underlying surface defects by analyzing fluorescence properties under UV illumination. The solution will include a smartphone-compatible UV light source and a mobile application for image processing and defect detection. The project will focus on developing an affordable, portable, and user-friendly inspection tool for vehicle owners, automotive professionals, and insurance assessors. What is the design in this project? The design consists of: What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate?
What are the specific criteria for the success of the project? Successful attachment of the UV light module to a smartphone. Development of an application capable of detecting paint inconsistencies. Achieving a minimum detection accuracy of 80% in test conditions. Real-time image processing without significant lag. Positive feedback from test users regarding ease of use and effectiveness. Division of Tasks: Specific components/tools
The completed project will be kept by the students to do with as they wish. |
|||||||
| 1277 | Sema Kayhan | Monitoring System for Car/Bicycles | 2025 Spring | Efe Demir,Mehmet Alperen Gebel, Emir Berat Yuce, , , | |||
|
Title: Monitoring System for Car/Bicycles Overview of the project Car monitoring systems are becoming increasingly common in newer cars today. However, the majority of cars on the road are older models that lack these advanced safety features. Additionally, vehicles parked in high-risk or unfamiliar areas are often vulnerable to potential theft or vandalism.The purpose of this project is to build a comprehensive car monitoring system that can be easily installed into any older car, providing drivers with improved safety and security both while driving and when their vehicle is parked. What is the design in this project? Car(you can use bike also) monitoring systems including a blindspot detection and monitoring system equipped with sensors will be designed. What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools
The completed project will be kept by the students to do with as they wish. |
|||||||
| 1276 | Sema Kayhan | Monitoring System for Car/Bicycles | 2025 Spring | Seyma Sibel CamsaráÝ,Burak Dagasan, Sumeyye Sehitoglu, , , | |||
|
Title: Monitoring System for Car/Bicycles Overview of the project Car monitoring systems are becoming increasingly common in newer cars today. However, the majority of cars on the road are older models that lack these advanced safety features. Additionally, vehicles parked in high-risk or unfamiliar areas are often vulnerable to potential theft or vandalism.The purpose of this project is to build a comprehensive car monitoring system that can be easily installed into any older car, providing drivers with improved safety and security both while driving and when their vehicle is parked. What is the design in this project? Car(you can use bike also) monitoring systems including a blindspot detection and monitoring system equipped with sensors will be designed. What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools
The completed project will be kept by the students to do with as they wish. |
|||||||
| 1275 | Arif Nacaroğlu | Design, construction and application of motor and motor driver for electrical vehicles | 2024 Fall | Dogukan YazáÝcáÝ, , , | |||
|
Title: Design, construction and application of motor and motor driver for electrical vehicles Overview of the project |
|||||||
| 1274 | Musa Bute | Design of face recognition glasses for the visually impaired | 2024 Fall | Cengiz Sen, Mustafa Karatas, Yunus Karageyik,Alper Bulut , , , | |||
|
Title: Design of face recognition glasses for the visually impaired Overview of the project This project focuses on the design of smart glasses developed for visually impaired individuals, integrating a face recognition system. This innovative technology aims to provide visually impaired individuals with the ability to recognize people around them. What is the design in this project?
What realistic constraints is the project outcome expected to satisfy? This system, which aims to address a significant gap by enabling visually impaired individuals to recognize and interact with people around them, is designed to be cost-effective and accessible to a wide range of users. Under which realistic circumstances is the designed product/system supposed to operate? The glasses are designed to be used by the user at home, on the street, in public transportation, or in indoor environments. What are the specific criteria for the success of the project?
Division of Tasks: Specific components/tools
The completed project will be kept by the students to do with as they wish. --!> |
|||||||
| 1273 | Serkan Özbay | Sea Wave Energy Harvesting | 2024 Fall | Murat BahadáÝr Eyice, Utku Celik, Furkan BahûÏekapáÝláÝ, Nihat Cakmak, , , | |||
|
Title: Sea Wave Energy Harvesting Overview of the project |
|||||||
| 1272 | Uğur Cem Hasar | Microwave sensor for detection of concentration of phosphate and nitrite mixture in water. | 2024 Fall | Ahmet Hakan AcáÝkgoz, Mehmet Akif Gursoy, Necla Sincar, Betul AydáÝn, , , | |||
|
Title: Microwave sensor for detection of concentration of phosphate and nitrite mixture in water. Overview of the project
What is the design in this project? A microwave sensor unit will be designed for detection of concentration of phosphate and nitrite mixture in water. The system is expected to examine any harmful effects of the measured concentration to a human being. What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate? The designed product can be used by home applications. What are the specific criteria for the success of the project?
Division of Tasks: Specific components/tools
The completed project will be kept by the supervisor for further use. |
|||||||
| 1271 | Taner İnce | Solar Panel Cleaning Robot | 2024 Fall | Ipek TáÝstáÝk, Dilara Gû¥rkan, Hasan Bedir Ates, , , | |||
|
Title: Solar Panel Cleaning Robot Overview of the project Solar panels are a vital component in renewable energy production, but their efficiency can be significantly reduced by the accumulation of dirt, dust, and debris on their surfaces. Manual cleaning methods are often labor-intensive and costly. This project aims to develop an autonomous robot designed to clean solar panels efficiently and effectively, thereby maintaining their optimal performance. What is the design in this project? A cleaning robot will be designed. It consists of mechanical and electrical parts to operate the robot efficiently. What realistic constraints is the project outcome expected to satisfy? The designed robot should take into account the followings:
Under which realistic circumstances is the designed product/system supposed to operate? It should clean all the surface area of the panel. The robot must be able to work even if the solar panel has a tilt angle. What are the specific criteria for the success of the project? Efficiency and cost effectiveness play a vital role in this project. The robot should work under any weather condition. Division of Tasks: Specific components/tools Microcontroller, Sensors, cleaning part, etc. The completed project will be kept by the students to do with as they wish. |
|||||||
| 1269 | Ergun Erçelebi | Devepolment of Connected weareble ECG Device | 2024 Fall | Nisa Nur Aksahin, Zeynep Akgun, Zeynep Mecan, , , | |||
|
Title: Devepolment of Connected weareble ECG Device Overview of the project As medical remote patient monitoring becomes more important, the need for wearable ECG capability has become ciritical. Connected wearable electrocardiogram (ECG) devices represent a significant advancement in the field of personal healthcare monitoring. These devices are designed to continuously track heart activity, offering real-time insights into cardiovascular health. With the integration of advanced sensors, wireless technology, and cloud-based platforms, connected wearable ECG devices are transforming how patients and healthcare providers manage heart conditions. In the project, students will develop a portable ECG measurement device with internet connectivity. Project details will be shared in the first meeting with the students. What is the design in this project?
What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate?
What are the specific criteria for the success of the project? The project outcome will be considered successful if it operates within the constraints specified in the constraints section.
The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1262 | Ali Osman Arslan | PV Panel Cleaner | 2024 Fall | á¯brahim OKUDUCU ,Mehmet kapgáÝ ,Ebubekir Dogan,Abdullah Yigit Kalaz, , , | |||
|
Title: PV Panel Cleaner Overview of the project This project aims to design a PV panel cleaner to improve the efficiency of photovoltaic (PV) panels used in solar energy systems. Dirt and dust accumulation significantly reduce the performance of solar panels. The designed system will be an automatic or semi-automatic cleaning system that is resistant to environmental conditions. It should operate with minimal energy consumption and perform the cleaning process without damaging the panels. What is the design in this project? The project will involve the integration of mechanical and electronic components. The design phase will include the development of the cleaning mechanism (brush, water spray, etc.) and the automation of the system via a microcontroller. Furthermore, the system will be optimized to consider the tilt of the panels, the level of dirt, and environmental conditions. What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate? The system must be robust enough to operate under outdoor conditions (wind, rain, temperature changes, etc.) and be flexible to work on PV panels with different tilts. It should also be equipped with a timer or sensor-based triggering mechanism to regularly clean daily dust and dirt buildup. What are the specific criteria for the success of the project?
Division of Tasks: Specific components/tools
The completed project will be kept by the students to do with as they wish. |
|||||||
| 1261 | Ali Osman Arslan | PV Panel Cleaner | 2024 Fall | Yusuf Sahin, Talha Kursat Ozdemir, Berat BaldáÝz, , , | |||
|
Title: PV Panel Cleaner Overview of the project This project aims to design a PV panel cleaner to improve the efficiency of photovoltaic (PV) panels used in solar energy systems. Dirt and dust accumulation significantly reduce the performance of solar panels. The designed system will be an automatic or semi-automatic cleaning system that is resistant to environmental conditions. It should operate with minimal energy consumption and perform the cleaning process without damaging the panels. What is the design in this project? The project will involve the integration of mechanical and electronic components. The design phase will include the development of the cleaning mechanism (brush, water spray, etc.) and the automation of the system via a microcontroller. Furthermore, the system will be optimized to consider the tilt of the panels, the level of dirt, and environmental conditions. What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system supposed to operate? The system must be robust enough to operate under outdoor conditions (wind, rain, temperature changes, etc.) and be flexible to work on PV panels with different tilts. It should also be equipped with a timer or sensor-based triggering mechanism to regularly clean daily dust and dirt buildup. What are the specific criteria for the success of the project?
Division of Tasks: Specific components/tools
The completed project will be kept by the students to do with as they wish. |
|||||||
| 1260 | Sema Kayhan | Smart Car Parking System | 2024 Fall | Malek Barakat, Fares Bazazoa, Esra Cetinkaya, , , | |||
|
Title: Smart Car Parking System Overview of the project In smart parking systems a car is parked without the driver entering into the carpark. The basic operation is that the vehicle comes in /on to the pallet(elevator), then according to the information received from the sensors, the vehicle is automatically parked into the empty spaces without a driver with the help of a pallet. Here, the pallet's going up and down, the movements in x and y coordinates can be provided with the help of a suitable controllers. Position of the cabin is determined with respect to states of border switches. All the processes in the system will be controlled by PLC/PIC/microcontroller. What is the design in this project? In this study, a prototype automatic parking having three floors and three arrays resulting 12 vehicles capacity has been designed. What realistic constraints is the project outcome expected to satisfy? The car elevator system should be moved succesfully in x and y axis for automatic car parking. Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
Specific components/tools PLC/PIC/microcontroller, DC motors, sensors The completed project will be kept by the students to do with as they wish. |
|||||||
| 1259 | Sema Kayhan | Smart Car Parking System | 2024 Fall | Abdurrahman Aljaser , Muhammed elsiveg, Moaaz Reda Fawzi, , , | |||
|
Title: Smart Car Parking System Overview of the project In smart parking systems a car is parked without the driver entering into the carpark. The basic operation is that the vehicle comes in /on to the pallet(elevator), then according to the information received from the sensors, the vehicle is automatically parked into the empty spaces without a driver with the help of a pallet. Here, the pallet's going up and down, the movements in x and y coordinates can be provided with the help of a suitable controllers. Position of the cabin is determined with respect to states of border switches. All the processes in the system will be controlled by PLC/PIC/microcontroller. What is the design in this project? In this study, a prototype automatic parking having three floors and three arrays resulting 12 vehicles capacity has been designed. What realistic constraints is the project outcome expected to satisfy? The car elevator system should be moved succesfully in x and y axis for automatic car parking. Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
Specific components/tools PLC/PIC/microcontroller, DC motors, sensors The completed project will be kept by the students to do with as they wish. |
|||||||
| 1257 | Serkan Özbay | Autonomous Parking Robot Design | 2024 Fall | ABDELRAHMAN SALAH MAAROUF KAMEL, FATá¯H SIMSEK, YAMEN MUSTAFA, Murad Shirinli, , , | |||
|
Title: Autonomous Parking Robot Design Overview of the project It is known that autonomous vehicles will be the future of transportation systems. The purpose of this project is to design a robot car which maneuvers through a miniature parking lot to find open perpendicular or parallel spots and then automatically parks the robot car. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? The robot car must park automatically without hitting other cars in the parking lot. Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? The robot car must be able to park autonomously both parallel and perpendicularly whenever needed.
The completed project will be kept by the students to do with as they wish. |
|||||||
| 1255 | Seydi Kaçmaz | Infrared Vein Imaging System Using a Smartphone | 2025 Spring | Melih Yilmaz, Muhittin Gunes, Furkan Aydemir, , , | |||
|
Title: Infrared Vein Imaging System Using a Smartphone Overview of the project This project aims to develop an infrared vein imaging system that can be attached to a smartphone. The system uses infrared light to visualize superficial veins beneath the skin by integrating with the smartphone camera. This technology can aid in easier and more accurate vein detection for intravenous injections and other procedures. The project includes the design of the device hardware, software integration, and user experience. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the supervisor for further use.. |
|||||||
| 1254 | Sema Kayhan | Smart Glasses for the Visually Impaired | 2024 Spring | Mert Bacaksiz, Onur Anilir, Muhammed Furkan Ari, Hasan Salih Durukan | |||
|
Title: Smart Glasses for the Visually Impaired Overview of the project The project aims to develop an intelligent cane for visually impaired individuals, incorporating image processing techniques, sensor technologies, machine learning algorithms, and auditory feedback. The primary objective is to enhance the mobility and safety of visually impaired individuals by providing them with a device capable of detecting obstacles in their surroundings and providing real-time feedback. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1253 | Mahmut Aykaç | Software Developer Keyboard | 2024 Spring | Rabia Sultan Hidayet, Mehmet Emin Erbulut, Furkan Gok, | |||
|
Title: Software Developer Keyboard Overview of the project Students are supposed to design and develop a keyboard which is specific for the software developers. Software developers suffer from switching between different operating systems and their different shorcuts. Since ease and comfortness are cruical for these developers. The keyboard will solve their issues. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1252 | Mahmut Aykaç | Telemetry Communication and Control System | 2024 Spring | Ali Mert Ozsoylemez, Semih Poyraz, Abdulkadir Goregen, | |||
|
Title: Telemetry Communication and Control System Overview of the project Students are supposed to design and develop a telemetry system and communication system for avionics such as drones, planes etc. This system receives and displays the vital parameters of the flying object on a ground station. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1251 | Ali Osman Arslan | Development and Implementation of vehicle license plate recognition and processing system | 2024 Spring | Suleyman Dasoluk, Suphi Emre Benli, Metin Volkan Dana, | |||
|
Title: Development and Implementation of vehicle license plate recognition and processing system Overview of the project The "Development and Implementation of Vehicle License Plate Recognition and Processing System" project aims to make human life easier by using the image processing system or to manage transactions with smart systems by reducing manpower in places such as parking lots. It makes parking spaces more convenient and cheaper for people to use. This project will include prototyping, testing and implementation of a vehicle license plate recognition processing system. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Reducing manpower, increasing the security level and obtaining a cheap system are the realistic constraints of the project and will be determined later. Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1250 | Ali Osman Arslan | Development and Implementation of Smart Battery Charger with SMPS Topology | 2024 Spring | Burak Yasar, Muhammed Said Tokgoz, Ali Emre Gulecoglu, | |||
|
Title: Development and Implementation of Smart Battery Charger with SMPS Topology Overview of the project The project "Development and Implementation of Smart Battery Charger with SMPS Topology" aims to design and create a cutting-edge battery charging system that utilizes Switched-Mode Power Supply (SMPS) technology for efficient power conversion. This smart charger will incorporate advanced features such as intelligent charging algorithms, real-time monitoring, and automatic voltage regulation to optimize the charging process and prolong battery life. The project will involve research, design, prototyping, testing, and implementation of the smart battery charger, with a focus on enhancing charging efficiency and reliability. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1249 | Arif Nacaroglu | Design an realization of the parallel plate system | 2024 Fall | Emirhan Cengel, Ekin Arman Dogan, , , | |||
|
Title: Design an realization of the parallel plate system Overview of the project In this Project the system will be designed to keep the plate paralel to ground to hold the free moving sphere on it. The plate located on to the controllable system will move in required direction to keep the Rolling sphere at the center. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1248 | Sema Kayhan | Smart Locking | 2024 Spring | Huseyin Emir Kir, , , | |||
|
Title: Smart Locking Overview of the project Usually a lock needs some sort of key to open, but keys can be troublesome if the authorized user forget to bring the key. In this project a smart lock will be designed that gives users the convenient alternative of using the phone they already carry to unlock it. It also makes it possible to remotely unlock the door for someone (who could request access from the owner). To deter unauthorized access, the lock system would also record and transmit images of whoever tries to open the lock. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1247 | Mete Vural | Electromagnet accelerator | 2024 Spring | Mehmet Goktug Cetin, Dogukan Mert Ozdemir, Ahmet Mirza Anteplioglu, | |||
|
Title: Electromagnet accelerator Overview of the project In this project, an electromagnet accelerator will be designed. The aim of this design is to accelerate a small iron ball in a circular-path. The system will consist of a circular path, a small iron ball, 3 or more electromagnets, a DC-DC converter, and a speed measurement system.Any suitable Arduino board or a microcontroller can be used in this project to control the DC-DC converter to adjust the acceleration/speed of the ball. The DC voltage applied to the electromagnets should be controlled by the DC-DC converter so that the ball acceleration/speed can be adjusted by changing input voltage of the electromagnets. The ball speed should also be measured with a suitable sensor and Ardunio board (or a microcontroller). The ball speed will be shown on an LCD display. Other details can be discussed with the supervisor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1246 | Mahmut Aykaç | Real Time Modified Sign Language Recognition | 2024 Spring | Talha Eray Dogan, Furkan Temiz, KasáÝm Soker, | |||
|
Title: Real Time Modified Sign Language Recognition Overview of the project The students are supposed to develop a software on PC that recognizes the sign language in real time. The traditional sign language must be modified and each move must mean some thing else. For example the phrase ãHow are you?ã must be represented by only one hand move. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1244 | Seydi Kaçmaz | Motion Detection and Tracking System | 2024 Spring | Mustafa Can Aslan, Fevzi Okkes Dagli, Feyzullah Eren, Busra Celik | |||
|
Title: Motion Detection and Tracking System Overview of the project This project aims to develop an image processing system capable of real-time object tracking and detection from video streams. The system will utilize computer vision algorithms to identify and follow objects within the video frames, making it suitable for various applications such as security camera systems and robotics. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of Tasks [for Group Projects]:
Specific Components/Tools:
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 1243 | Serkan Özbay | Design of corset type electric heat warmer and massager | 2024 Spring | Batuhan Dogan, Eyup Yildiz, Ali Engincan Bayiltmis, Tunay Yildiz | |||
|
Title: Design of corset type electric heat warmer and massager Overview of the project The aim of this project is to design a corset that includes a heating module and vibration module. The corset must heat within a certain temperature range. If the temperature is below a certain amount, the heating module should be active; if the temperature amount exceeds the desired value, the heating module should be disabled. In addition, the system should also function as a massager via vibration motors. The operating time of the vibration module that will act as a massager must be adjustable. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the supervisor for further use. |
|||||||
| 1242 | Serkan Özbay | Design of corset type electric heat warmer and massager | 2024 Spring | Melih Ayberk Onal, Memet Polat, Ercan Kurt, Metehan Tutarga | |||
|
Title: Design of corset type electric heat warmer and massager Overview of the project The aim of this project is to design a corset that includes a heating module and vibration module. The corset must heat within a certain temperature range. If the temperature is below a certain amount, the heating module should be active; if the temperature amount exceeds the desired value, the heating module should be disabled. In addition, the system should also function as a massager via vibration motors. The operating time of the vibration module that will act as a massager must be adjustable. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the supervisor for further use. |
|||||||
| 1241 | Musa Bute | Wireless Phone Charger Using Inductive Coupling | 2024 Spring | Omer Faruk Izmir, Mucahid Polat, Furkan Alper Ozbay, Hukumran Onur Kocyigitoglu | |||
|
Title: Wireless Phone Charger Using Inductive Coupling Overview of the project Project Overview: This project is designed to charge mobile phones without using cables. What is the design in this project? Project design consists of 2 main components: What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1236 | Sema Kayhan | A Tracking system for Alzheimerãs Patient | 2024 Spring | Muhammet Yasin Basak, , , | |||
|
Title: A Tracking system for Alzheimerãs Patient Overview of the project Many elderly persons may live in elderly homes or retirement homes and have many health-related problems. It is difficult for the staff to keep track of the health of all the individuals and reach them in time in case assistance is needed. In this situation, a cost-effective device keeps track of various health data such as heart rate, temperature, blood oxygen, and an emergency like fall detection. In addition, if the elderly person is lost, we would have GPS tracking enabled to determine their location and assist them as needed. Our connecting web application would allow the elderly home caretakers to monitor multiple elderly people simultaneously, track individual health irregularities, and communicate them to the doctors. A notification would be sent on the app when an irregular critical heart rate or breathing activity for a particular person is observed, and an alarm on the person would be triggered. The alarm will also be triggered when a fall is detected. We could also store past health data points in a database and monitor for any irregularities, or doctors can use this during checkups. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1227 | Uğur Cem Hasar | A microwave Measurement System for Noninvasive Detection of Moisture within Agricultural Products (Grains) | 2024 Spring | Betul Ekren, Duygu Coban, Hakan Andik, | |||
|
Title: A microwave Measurement System for Noninvasive Detection of Moisture within Agricultural Products (Grains) Overview of the project Moisture content of grains is one of the most influential factor directly altering its storage, market value, chemical, and quality. Moisture content within grains must be controlled in order to accomplish this goal, which otherwise will result in grow of insects and molds. For this reason, its moisture content must be measured and monitored. Microwaves are extremely sensitive to water content within samples and are considered to have great potential for moisture detection of agricultural products. The aim of the project is to design a microwave measurement system to detect moisture of some common grain types such as Bulgur wheat, durum wheat, and corn silage kernel. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? The following criteria are sufficient for this project to be considered for its success.
Division of tasks Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 1222 | Ali Osman Arslan | BATTERY MANAGEMENT SYSTEM FOR ELECTRIC BIKES | 2023 Fall | Muhammed Kursat Basturk, Hasan Huseyin Osanc, Zeynep Ozturk, Yusuf Dalak | |||
|
Title: BATTERY MANAGEMENT SYSTEM FOR ELECTRIC BIKES Overview of the project The battery management system developed for electric bicycles is designed to protect the health of each cell in the battery pack. This system ensures that the cells are maintained at the desired nominal values during charging and discharging, protecting their health. With this project, we aim to integrate battery management systems into electric bicycles to provide a better user experience. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1221 | Uğur Cem Hasar | Non-invasive Microwave Sensor Blood Glucose Meter Integrated with Artificial Intelligence and Its Own Mobile App (GlucoTrack App) Using Bluetooth | 2023 Fall | Kutay Bolukcu, Ali Riza Ayhan, Furkan Karakas, Enver Yildirim | |||
|
Title: Non-invasive Microwave Sensor Blood Glucose Meter Integrated with Artificial Intelligence and Its Own Mobile App (GlucoTrack App) Using Bluetooth Overview of the project
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 1220 | Mehmet Demir | Rocket Avionics System | 2023 Fall | Emre Tel, Ibrahim Eren Burma, Selin Cakiroglu, Ahmet Cevik | |||
|
Title: Rocket Avionics System Overview of the project The primary objective of this project is to delve into the mechanisms and technology behind the transmission of telemetry data in rockets. This includes understanding the various components used, their control mechanisms, and most crucially, the collection and transmission of temperature, pressure, speed, and positional data of the rocket. What is the design in this project? Data Collection Unit: Data Transmission Unit: Control System: Ground Station: Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1219 | Sema Kayhan | DESIGN AND DEVELOPMENT OF A COLOUR SENSING BASED OBJECT SORTING | 2023 Fall | Ahmet Hamdi Balak, Delal Altunok, Ismet Gursoy, Noyfel Bulguoglu | |||
|
Title: DESIGN AND DEVELOPMENT OF A COLOUR SENSING BASED OBJECT SORTING Overview of the project In this project, a fixed robot arm will be built. This designed project aims to make product separation, placement, and arrangement processes in factories faster, safer, and more accurate. The project consists of 3 main systems: a conveyor belt, robot arm, and image processing systems. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? The project will have following outcomes: Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1218 | Musa Bute | Improvement on Designing a Biomedical Apparatus for Patient with Broken Leg | 2024 Spring | Ali Akalin, Hazal Nuray Saricabagli, Ibrahim Halil Delioglu, | |||
|
Title: Improvement on Designing a Biomedical Apparatus for Patient with Broken Leg Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1217 | Musa Bute | Improvement on Position control of Micro DC motor | 2024 Fall | Hamza Fatih Cakmak, Mehmet Ali Unlu, Muhammed Huseyin CaláÝskan, , , | |||
|
Title: Improvement on Position control of Micro DC motor Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1216 | Musa Bute | Improvement on Designing a Biomedical Apparatus for Patient with Broken Arm | 2023 Fall | Mehmet Akif Basbug, Ahmet Hakan Karadana, Muhammet Taner Adiyaman, | |||
|
Title: Improvement on Designing a Biomedical Apparatus for Patient with Broken Arm Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1215 | Musa Bute | Improvement on Designing a Biomedical Apparatus for Patient with Broken Arm | 2023 Fall | Yigithan Dogangac, Mehmet Goksad Ergul, Suleyman Deger, Muhammed Ikbal Gul | |||
|
Title: Improvement on Designing a Biomedical Apparatus for Patient with Broken Arm Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1214 | Serkan Özbay | Design of earthquaqe sensing and indicating system | 2023 Fall | Rauf Bora Bataklar, Furkan Yilmaz, Burak Tunahan Topal, Melike Demir | |||
|
Title: Design of earthquaqe sensing and indicating system Overview of the project The purpose of this project is to design a system to sense and indicate the vibrations during the earthquaqe. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the supervisor for further use. |
|||||||
| 1213 | Serkan Özbay | Design of earthquaqe sensing and indicating system | 2023 Fall | Emel Olgar, Mahmut Seyfi Olgar, Hacer Tasci, Yusuf Zeytun | |||
|
Title: Design of earthquaqe sensing and indicating system Overview of the project The purpose of this project is to design a system to sense and indicate the vibrations during the earthquaqe. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the supervisor for further use. |
|||||||
| 1212 | Serkan Özbay | Design of GSM blocking system | 2023 Fall | Refikcan Kartufan, Yusuf Yilmaz, Enes Mert Zor, | |||
|
Title: Design of GSM blocking system Overview of the project The purpose of this project is to design a system to jam and block the operation of GSM mobile phones in classrooms, conference halls, etc. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the supervisor for further use. |
|||||||
| 1211 | Serkan Özbay | Design of GSM blocking system | 2023 Fall | Seyit Ali Ocak, Halil Karademir, Muhammed Bakir, | |||
|
Title: Design of GSM blocking system Overview of the project The purpose of this project is to design a system to jam and block the operation of GSM mobile phones in classrooms, conference halls, etc. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the supervisor for further use. |
|||||||
| 1208 | Ergun Erçelebi | Touch Screen Controlled Robotic Arm | 2024 Spring | Sevim Karsiz, Mehmet Tugrul Koyuncu, Akin Gecili, | |||
|
Title: Touch Screen Controlled Robotic Arm Overview of the project In the project, the robot will be controlled remotely through a touchscreen. Movements to be executed by the robot will be transmitted to the robot via radio signals through the touchscreen. The robot is expected to analyze the received signal and perform the necessary tasks accordingly. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1206 | Ergun Erçelebi | Development of 5V DC To 80V DC-DC Boost Converter | 2025 Spring | Abdurrahman Hasta, , , | |||
|
Title: Development of 5V DC To 80V DC-DC Boost Converter Overview of the project In the project, the input voltage varies between 5V-10V volts. Output voltage will be 80V DC. Student needs to design embedded software, embedded hardware and power electronics circuitry to develop this converter. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1205 | Ergun Erçelebi | Development of 5V DC To 80V DC-DC Boost Converter | 2025 Spring | Lava Hassan, , , | |||
|
Title: Development of 5V DC To 80V DC-DC Boost Converter Overview of the project In the project, the input voltage varies between 5V-10V volts. Output voltage will be 80V DC. Student needs to design embedded software, embedded hardware and power electronics circuitry to develop this converter. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1204 | Ergun Erçelebi | Development of a life-saving drone | 2023 Fall | Metin Volkan Dana, Umutcan Balcin, Muhammed Sultan Altintepe, Mustafa Ertas | |||
|
Title: Development of a life-saving drone Overview of the project Development of a life-saving drone. A drone that will carry a life vest to a person drowning at sea will be designed in the project. The details of the project will be presented during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1203 | Ergun Erçelebi | Development of a life-saving drone | 2023 Fall | Alper Safa Celik, Bilal Beyoglu, Adem Gurler, | |||
|
Title: Development of a life-saving drone Overview of the project Development of a life-saving drone. A drone that will carry a life vest to a person drowning at sea will be designed in the project. The details of the project will be presented during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1202 | Arif Nacaroğlu | Design an realization of number location system. | 2024 Fall | Furkan Kogce, , , | |||
|
Title: Design an realization of number location system. Overview of the project In this Project the system will be designed to locate the numbers from 1 to 10 by using some carrirying mechanism. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1201 | Arif Nacaroğlu | Design an realization of number location system. | 2025 Spring | Bekir Can Cucuk, , , | |||
|
Title: Design an realization of number location system. Overview of the project In this Project the system will be designed to locate the numbers from 1 to 10 by using some carrirying mechanism. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1200 | Arif Nacaroğlu | Design an realization of the parallel plate system | 2023 Fall | Serhat Demir, Mesut Imren, Malik Gumus, Mert Karabiyik | |||
|
Title: Design an realization of the parallel plate system Overview of the project In this Project the system will be designed to keep the plate paralel to ground to hold the free moving sphere on it. The plate located on to the controllable system will move in required direction to keep the Rolling sphere at the center. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1199 | Arif Nacaroğlu | Design an realization of the parallel plate system | 2025 Spring | Hatice Betû¥l Dogan, Ecenur OrakláÝ,Bû¥nyamin Polat, Mehmet Fatih Polat, , , | |||
|
Title: Design an realization of the parallel plate system Overview of the project In this Project the system will be designed to keep the plate paralel to ground to hold the free moving sphere on it. The plate located on to the controllable system will move in required direction to keep the Rolling sphere at the center. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1198 | Sema Kayhan | A Tracking system for Alzheimer's Patient | 2024 Spring | Yusuf Mutlu TaparláÝ, Merve Avci, Nuray Tanriover, | |||
|
Title: A Tracking system for Alzheimer's Patient Overview of the project Getting lost away from home is a big issue for Alzheimerãs patient. This project aims to build a wearable device which can track Alzheimerãs disease patientsã location when they leave home alone and send alarm message which include current location to the family member. The family member can request the current location of Alzheimerãs disease patient by sending a SMS message at any time, and the device will send back the location by SMS message automatically. This project has GPS signal checking function. It will send a alarm message if there is no GPS signal. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? The project will have following outcomes: Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1197 | Sema Kayhan | A Tracking system for Alzheimer's Patient | 2024 Spring | Furkan Bilbay, Mustafa Unal Altun, Eyup Tingirlioglu, | |||
|
Title: A Tracking system for Alzheimer's Patient Overview of the project Getting lost away from home is a big issue for Alzheimerãs patient. This project aims to build a wearable device which can track Alzheimerãs disease patientsã location when they leave home alone and send alarm message which include current location to the family member. The family member can request the current location of Alzheimerãs disease patient by sending a SMS message at any time, and the device will send back the location by SMS message automatically. This project has GPS signal checking function. It will send a alarm message if there is no GPS signal. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? The project will have following outcomes: Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1196 | Sema Kayhan | Smart Locking | 2024 Spring | Abdelrahman Abomosa, , , | |||
|
Title: Smart Locking Overview of the project Usually a lock needs some sort of key to open, but keys can be troublesome if the authorized user forget to bring the key. In this project a smart lock will be designed that gives users the convenient alternative of using the phone they already carry to unlock it. It also makes it possible to remotely unlock the door for someone (who could request access from the owner). To deter unauthorized access, the lock system would also record and transmit images of whoever tries to open the lock. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1195 | Sema Kayhan | Smart Locking | 2024 Spring | Mert Gokmen, , , | |||
|
Title: Smart Locking Overview of the project Usually a lock needs some sort of key to open, but keys can be troublesome if the authorized user forget to bring the key. In this project a smart lock will be designed that gives users the convenient alternative of using the phone they already carry to unlock it. It also makes it possible to remotely unlock the door for someone (who could request access from the owner). To deter unauthorized access, the lock system would also record and transmit images of whoever tries to open the lock. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1194 | Mete Vural | Wearable gas sensor | 2024 Fall | Ahmet á¯mir, , , | |||
|
Title: Wearable gas sensor Overview of the project In this project, a wearable gas sensor for industrial harsh conditions will be developed. The system will consist of a vest, a gas sensor, a suitable Arduino board, and additional components. The function of this vest will be as follows: The system should be able to continuously check the following gas densities (minimum 2 gas types are required). The ppm level of the gas can be shown on an LCD display. If the ppm level of the gas becomes greater than the predefined threshold level, the system will alert the user. This system will be connected to a mobile phone by Bluetooth. The system should be able to continuously measure the environment temperature and humidity. Other details can be discussed with the supervisor. For this project, the ppm level of minimum 2 gas types from the following list should be continuously monitored: What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1193 | Mete Vural | Wearable gas sensor | 2025 Spring | Mikail Seker, , , | |||
|
Title: Wearable gas sensor Overview of the project In this project, a wearable gas sensor for industrial harsh conditions will be developed. The system will consist of a vest, a gas sensor, a suitable Arduino board, and additional components. The function of this vest will be as follows: The system should be able to continuously check the following gas densities (minimum 2 gas types are required). The ppm level of the gas can be shown on an LCD display. If the ppm level of the gas becomes greater than the predefined threshold level, the system will alert the user. This system will be connected to a mobile phone by Bluetooth. The system should be able to continuously measure the environment temperature and humidity. Other details can be discussed with the supervisor. For this project, the ppm level of minimum 2 gas types from the following list should be continuously monitored: What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1192 | Mete Vural | Weight carrying robot | 2023 Fall | Omer Cicek, Samet Yilgin, Ibrahim Suner, | |||
|
Title: Weight carrying robot Overview of the project In this project, a robot will be designed. It should carry a minimum load of 15 kg. Its speed should be controlled. It should also be controlled in 4-directions. A suitable Arduino board or a microcontroller will be used in this project. The robot speed and its direction should be controlled using a mobile phone or tablet via Bluetooth communication. Other details can be discussed with the supervisor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1191 | Mete Vural | Weight carrying robot | 2023 Fall | Alparslan Derecik, Aysegul Cetin, Cemal Ucan, | |||
|
Title: Weight carrying robot Overview of the project In this project, a robot will be designed. It should carry a minimum load of 15 kg. Its speed should be controlled. It should also be controlled in 4-directions. A suitable Arduino board or a microcontroller will be used in this project. The robot speed and its direction should be controlled using a mobile phone or tablet via Bluetooth communication. Other details can be discussed with the supervisor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1190 | Mete Vural | Electromagnet accelerator | 2023 Fall | Burak Celik, Beyza Daglioglu, Serkan Kolus, Maze Tamay Ercan | |||
|
Title: Electromagnet accelerator Overview of the project In this project, an electromagnet accelerator will be designed. The aim of this design is to accelerate a small iron ball in a circular-path. The system will consist of a circular path, a small iron ball, 3 or more electromagnets, a DC-DC converter, and a speed measurement system.Any suitable Arduino board or a microcontroller can be used in this project to control the DC-DC converter to adjust the acceleration/speed of the ball. The DC voltage applied to the electromagnets should be controlled by the DC-DC converter so that the ball acceleration/speed can be adjusted by changing input voltage of the electromagnets. The ball speed should also be measured with a suitable sensor and Ardunio board (or a microcontroller). The ball speed will be shown on an LCD display. Other details can be discussed with the supervisor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1189 | Mete Vural | Electromagnet accelerator | 2024 Spring | Ahmet Emre Soysal, Hasan Tikir, Muhammet Ozufacik, | |||
|
Title: Electromagnet accelerator Overview of the project In this project, an electromagnet accelerator will be designed. The aim of this design is to accelerate a small iron ball in a circular-path. The system will consist of a circular path, a small iron ball, 3 or more electromagnets, a DC-DC converter, and a speed measurement system.Any suitable Arduino board or a microcontroller can be used in this project to control the DC-DC converter to adjust the acceleration/speed of the ball. The DC voltage applied to the electromagnets should be controlled by the DC-DC converter so that the ball acceleration/speed can be adjusted by changing input voltage of the electromagnets. The ball speed should also be measured with a suitable sensor and Ardunio board (or a microcontroller). The ball speed will be shown on an LCD display. Other details can be discussed with the supervisor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1188 | Mahmut Aykaç | Realization Low-Frequency RF Energy Harvester | 2025 Spring | Yousef Odah, , , | |||
|
Title: Realization Low-Frequency RF Energy Harvester Overview of the project The student is supposed to be design and realize a low frequency RF energy harvester circuit. The circuit must operate with frequencies in kHz range What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1186 | Mahmut Aykaç | Real Time Modified Sign Language Recognition | 2023 Fall | Ahmet Aslan, Sibe Elasfur, Muaz Mohammad, | |||
|
Title: Real Time Modified Sign Language Recognition Overview of the project The students are supposed to develop a software on PC that recognizes the sign language in real time. The traditional sign language must be modified and each move must mean some thing else. For example the phrase ãHow are you?ã must be represented by only one hand move. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1181 | Tolgay Kara | Trash disposal robot | 2023 Fall | Zelal Katbi, Melike Celebi, Nisanur Bayram, | |||
|
Title: Trash disposal robot Overview of the project In this project, an autonomous trash disposal robot for indoor use will be designed and constructed. The robot will move around looking for dumped trash. When it finds the trash, it will pick it up and put it into the trash can. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1180 | Tolgay Kara | Wearable technologies for disabled people | 2024 Spring | Ahmed Seyh Ali, , , | |||
|
Title: Wearable technologies for disabled people Overview of the project The project involves designing a wearable technological device with the specific aim of helping people with disabilities. The student is free to decide the type of disability and design the wearable device as they prefer, but improvement in daily lives of disabled people should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1179 | Tolgay Kara | Wearable technologies for disabled people | 2025 Spring | Muhammed Sait Yakut, , , | |||
|
Title: Wearable technologies for disabled people Overview of the project The project involves designing a wearable technological device with the specific aim of helping people with disabilities. The student is free to decide the type of disability and design the wearable device as they prefer, but improvement in daily lives of disabled people should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1178 | Mehmet Demir | Digital twin system of a smart greenhouse | 2023 Fall | Mertcan Demirdas, Caner Zorlu, Mustafa Serhat Kaya, | |||
|
Title: Digital twin system of a smart greenhouse Overview of the project In this project, a digital twin of a smart greenhouse is designed and implemented. A prototype greenhouse is designed and produced. The control of the light entering the greenhouse should be controlled with a digital twin, taking into account the development of the products in the greenhouse. The irrigation system is also controlled by the digital twin of a smart greenhouse. Carbondioxide, Oxygen levels and soil moisture should also be checked with the digital twin. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1177 | Mehmet Demir | Digital twin system of a smart greenhouse | 2023 Fall | Ece Cinaroglu, Furkan Erbilgin, Fatih Koca, | |||
|
Title: Digital twin system of a smart greenhouse Overview of the project In this project, a digital twin of a smart greenhouse is designed and implemented. A prototype greenhouse is designed and produced. The control of the light entering the greenhouse should be controlled with a digital twin, taking into account the development of the products in the greenhouse. The irrigation system is also controlled by the digital twin of a smart greenhouse. Carbondioxide, Oxygen levels and soil moisture should also be checked with the digital twin. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1175 | Mehmet Demir | Design and implementation of a robotic flying bird with a remote controller | 2024 Spring | Rabia Aslan, Ceren Dilay Tas, Civan Ozel, Fatma Coskun | |||
|
Title: Design and implementation of a robotic flying bird with a remote controller Overview of the project In this project the robotic flying bird is designed and implemented. Two step motors are used to drive the birdãs wings. The bird is contolled by using a remote controller. The body of the bird should consist of a lightweight material. The material of which the wing is made should also be designed from a lightweight material. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1174 | Nuran Doğru | 3D LED Cube | 2024 Spring | Murat Baltaci, , , | |||
|
Title: 3D LED Cube Overview of the project LEDs are placed in three dimensions to generate the lighting effects. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks [for group projects] The project will be kept by the students to do with as they wish. |
|||||||
| 1173 | Nuran Doğru | 3D LED Cube | 2024 Fall | Musab Taskesen, , , | |||
|
Title: 3D LED Cube Overview of the project LEDs are placed in three dimensions to generate the lighting effects. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks [for group projects] The project will be kept by the students to do with as they wish. |
|||||||
| 1171 | Nuran Dogru | Design of high efficienyc class D power amplifier | 2024 Fall | Ali Sakrak, Ilbey AnáÝl Yaman, Abdullah Toygar, , , | |||
|
Title: Design of high efficienyc class D power amplifier Overview of the project High efficiecy amplifier will be designed to drive computer speakers or a set of stereo headphones. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks [for group projects] The project will be kept by the students to do with as they wish. |
|||||||
| 1169 | Nuran Doğru | Function generator | 2025 Spring | Muhammet Enes Aslan, Alper Safa CELá¯K, Soner Guclu, , , | |||
|
Title: Function generator Overview of the project A function generator will be designed having the following properties
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks [for group projects] The project will be kept by the students to do with as they wish. |
|||||||
| 1168 | Nurdal Watsuji | Automatic Open/Close Trash Bin | 2023 Fall | Huzeyfe Soylemez, , , | |||
|
Title: Automatic Open/Close Trash Bin Overview of the project An automatic trash-bot that opens its lid if it sees any trash and closes after a certain delay. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: Division of tasks: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1166 | Nurdal Watsuji | Smart Coffee Table | 2023 Fall | Mustafa Yildiz, Tuba Gozubuyuk, Abbas Ozkurt, | |||
|
Title: Smart Coffee Table Overview of the project The table illuminates the environment according to the weight of your drink. A weight sensor is attached to the smart coffee table. The microcontroller takes input from the weight sensor and drives RGB strip led using a code. The color of RGB strip led is adjusted based on the weight on the table. If the cup is empty, the red color is lit. Between 0-50 gr, the yellow color is lit. Between 50-100 gr, the green color is lit. Between 100-150 gr, the blue color is lit. 150 and higher, close to white color. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: Division of tasks: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1165 | Nurdal Watsuji | Smart Coffee Table | 2023 Fall | Fevzi Yasar Comert, Kadir Oguz, Samet Karasu, | |||
|
Title: Smart Coffee Table Overview of the project The table illuminates the environment according to the weight of your drink. A weight sensor is attached to the smart coffee table. The microcontroller takes input from the weight sensor and drives RGB strip led using a code. The color of RGB strip led is adjusted based on the weight on the table. If the cup is empty, the red color is lit. Between 0-50 gr, the yellow color is lit. Between 50-100 gr, the green color is lit. Between 100-150 gr, the blue color is lit. 150 and higher, close to white color. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: Division of tasks: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1164 | Nurdal Watsuji | Autonomous Fire Fighting Robot | 2023 Fall | Selcuk Oran, Rahmi Gokhan Mazman, Dogukan Kirmizigul, | |||
|
Title: Autonomous Fire Fighting Robot Overview of the project An advanced fire fighting robotic system will be designed. The system detects and extinguishes fire. This fire fighting robotic system is powered by a microcontroller and it consists of the ultra-sonic sensor mounted on a servo motor for obstacles detection and free path navigation, it is also equipped with the fire flame sensor for detecting and approaching fire it also makes use of water tank and spray mechanism for extinguishing the fire. Water spraying nozzle is mounted on servo motor to cover maximum area. Water is pumped from the main water tank to the water nozzle with the help of a pump. This water pump needs driver circuit as it consumes a lot of current, much more than the controller provides. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: Division of tasks: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1163 | Nurdal Watsuji | Autonomous Fire Fighting Robot | 2023 Fall | Atilay Yucel, Rohat Inel, Cagri Ceylan, | |||
|
Title: Autonomous Fire Fighting Robot Overview of the project An advanced fire fighting robotic system will be designed. The system detects and extinguishes fire. This fire fighting robotic system is powered by a microcontroller and it consists of the ultra-sonic sensor mounted on a servo motor for obstacles detection and free path navigation, it is also equipped with the fire flame sensor for detecting and approaching fire it also makes use of water tank and spray mechanism for extinguishing the fire. Water spraying nozzle is mounted on servo motor to cover maximum area. Water is pumped from the main water tank to the water nozzle with the help of a pump. This water pump needs driver circuit as it consumes a lot of current, much more than the controller provides. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: Division of tasks: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1160 | Seydi Kaçmaz | Motion Detection and Tracking System | 2023 Fall | Gokberk Gokcek, Aytac Ay, Erhan Vergili, Orkun Vedat Yigit | |||
|
Title: Motion Detection and Tracking System Overview of the project This project aims to develop an image processing system capable of real-time object tracking and detection from video streams. The system will utilize computer vision algorithms to identify and follow objects within the video frames, making it suitable for various applications such as security camera systems and robotics. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of Tasks [for Group Projects]:
Specific Components/Tools:
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 1159 | Seydi Kaçmaz | Motion Detection and Tracking System | 2024 Fall | Emre BostancáÝeri,Ugur Demirel,Onur Savas ,Mert Mercan, , , | |||
|
Title: Motion Detection and Tracking System Overview of the project This project aims to develop an image processing system capable of real-time object tracking and detection from video streams. The system will utilize computer vision algorithms to identify and follow objects within the video frames, making it suitable for various applications such as security camera systems and robotics. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of Tasks [for Group Projects]:
Specific Components/Tools:
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 1158 | Taner İnce | Tennis Ball Picker | 2024 Spring | Emin Almuhammed, Ayman Halwani, Malik Eltalip, | |||
|
Title: Tennis Ball Picker Overview of the project In this project an automatic tennis ball picker will be designed. It will pick the ball on the surface and put it in its storage box. Tennis balls in the area are recognized by the robot automatically. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1156 | Taner İnce | Earthquake Alert System | 2023 Fall | Huseyin Avni Ozcan, , , | |||
|
Title: Earthquake Alert System Overview of the project Develop an earthquake alert system to sense the earthquake tremors. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1154 | Taner İnce | Portable Oscilloscope | 2025 Spring | Mehmet Tuna BolukbasáÝ, , , | |||
|
Title: Portable Oscilloscope Overview of the project Developing a mini oscilloscope to display electrical signals up to 20 kHz. The system will be battery powered. The design should be small to be portable. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1153 | Taner İnce | Portable Oscilloscope | 2024 Spring | Melike Zeynep Baglama, , , | |||
|
Title: Portable Oscilloscope Overview of the project Developing a mini oscilloscope to display electrical signals up to 20 kHz. The system will be battery powered. The design should be small to be portable. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1152 | Ali Osman Arslan | Development of Flight Control System of Probe Rocket | 2023 Spring | Oguzhan Kandar, , , | |||
|
Title: Development of Flight Control System of Probe Rocket Overview of the project In this project, the flight computer of the rocket will be designed. The system should be able to instantly measure the altitude, location and information that the rocket seeks during flight or after landing, as well as any specific information on the ground station and on the rocket's own computer. All flight computer data is transmitted to the ground station via telemetry modules and antennas. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1151 | Ali Osman Arslan | Development of Flight Control System of Probe Rocket | 2023 Spring | Mehmet Sizer, , , | |||
|
Title: Development of Flight Control System of Probe Rocket Overview of the project In this project, the flight computer of the rocket will be designed. The system should be able to instantly measure the altitude, location and information that the rocket seeks during flight or after landing, as well as any specific information on the ground station and on the rocket's own computer. All flight computer data is transmitted to the ground station via telemetry modules and antennas. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1150 | Uğur Cem Hasar | Design a Polarization Converter Using a Metasurface Structure-1 | 2023 Spring | Unal Cevik, , , | |||
|
Title: Design a Polarization Converter Using a Metasurface Structure-1 Overview of the project Designing a reflection type polarization converter using a metasurface structure What is the design in this project?
What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 1149 | Uğur Cem Hasar | Design a Polarization Converter Using a Metasurface Structure-1 | 2023 Spring | Begum Alagoz, , , | |||
|
Title: Design a Polarization Converter Using a Metasurface Structure-1 Overview of the project Designing a reflection type polarization converter using a metasurface structure What is the design in this project?
What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 1148 | Uğur Cem Hasar | Design a Polarization Converter Using a Metasurface Structure-1 | 2023 Spring | Doga Duman, , , | |||
|
Title: Design a Polarization Converter Using a Metasurface Structure-1 Overview of the project Designing a reflection type polarization converter using a metasurface structure What is the design in this project?
What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 1147 | Uğur Cem Hasar | Design a Polarization Converter Using a Metasurface Structure-1 | 2023 Spring | Gizem Nehir Temel, , , | |||
|
Title: Design a Polarization Converter Using a Metasurface Structure-1 Overview of the project Designing a reflection type polarization converter using a metasurface structure What is the design in this project?
What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 1146 | Mahmut Aykaç | Speech Controlled Turning Signal | 2023 Spring | Veysel Balki, , , | |||
|
Title: Speech Controlled Turning Signal Overview of the project The student is supposed to design and develop an embedded system that turns on turning signals of a car by speech. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1145 | Mahmut Aykaç | Speech Controlled Turning Signal | 2023 Spring | Muhammed Omer Zahter, , , | |||
|
Title: Speech Controlled Turning Signal Overview of the project The student is supposed to design and develop an embedded system that turns on turning signals of a car by speech. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1144 | Serkan Özbay | Design of a microcontroller-based sEMG acquisiton and monitoring system | 2023 Spring | Huseyincan Kucuk, , , | |||
|
Title: Design of a microcontroller-based sEMG acquisiton and monitoring system Overview of the project An electromyography (EMG) is an analytical tool used to record muscles' electrical activity, which produces an electrical signal proportional to the level of muscle activity. The signal represents the anatomical and physiological properties of muscles; in fact, an EMG signal is the electrical activity of a muscle's motor units, which consist of two types: surface EMG (sEMG), and intramuscular EMG. Surface EMG signals are recorded by non-invasive electrodes. The goal of the project is to design a microcontroller-based sEMG acquisiton system. The system will capture the sEMG signals by the EMG sensors. Then the microcontroller-based circuit will process and then monitor sEMG signals. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the supervisor for further use. |
|||||||
| 1143 | Serkan Özbay | Design of a microcontroller-based sEMG acquisiton and monitoring system | 2023 Spring | Nezar Alali, , , | |||
|
Title: Design of a microcontroller-based sEMG acquisiton and monitoring system Overview of the project An electromyography (EMG) is an analytical tool used to record muscles' electrical activity, which produces an electrical signal proportional to the level of muscle activity. The signal represents the anatomical and physiological properties of muscles; in fact, an EMG signal is the electrical activity of a muscle's motor units, which consist of two types: surface EMG (sEMG), and intramuscular EMG. Surface EMG signals are recorded by non-invasive electrodes. The goal of the project is to design a microcontroller-based sEMG acquisiton system. The system will capture the sEMG signals by the EMG sensors. Then the microcontroller-based circuit will process and then monitor sEMG signals. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the supervisor for further use. |
|||||||
| 1142 | Nuran Doğru | Egg Cooking Machine | 2023 Spring | Kyaw Min Htet Aung, , , | |||
|
Title: Egg Cooking Machine Overview of the project Student will design an egg cooking machine having the following features:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish. |
|||||||
| 1141 | Nuran Doğru | Egg Cooking Machine | 2023 Spring | Yusuf Attal, , , | |||
|
Title: Egg Cooking Machine Overview of the project Student will design an egg cooking machine having the following features:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish. |
|||||||
| 1140 | Musa Bute | Designing a Biomedical Apparatus for Patient with Broken Leg | 2023 Spring | Hilal Ozguven, , , | |||
|
Title: Designing a Biomedical Apparatus for Patient with Broken Leg Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1139 | Musa Bute | Designing a Biomedical Apparatus for Patient with Broken Leg | 2023 Spring | Ibrahim Taha Lal, , , | |||
|
Title: Designing a Biomedical Apparatus for Patient with Broken Leg Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1138 | Musa Bute | Designing a Biomedical Apparatus for Patient with Broken Arm | 2023 Spring | Mert Ali Akbas, , , | |||
|
Title: Designing a Biomedical Apparatus for Patient with Broken Arm Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1137 | Musa Bute | Designing a Biomedical Apparatus for Patient with Broken Arm | 2023 Spring | Mustafa Enes Berker, , , | |||
|
Title: Designing a Biomedical Apparatus for Patient with Broken Arm Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1136 | Arif Nacaroğlu | 3-D shape identifier | 2023 Spring | Khant Phyo Aung, , , | |||
|
Title: 3-D shape identifier Overview of the project In this project, items will be sorted due to their shapes. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1135 | Mete Vural | Raspberry Pi Pico Based Digital Oscilloscope | 2023 Spring | Muhammet Emin Basar, , , | |||
|
Title: Raspberry Pi Pico Based Digital Oscilloscope Overview of the project In this project, A digital oscilloscope will be designed based on Raspberry Pi Pico DC loads are everywhere in our daily lives, as almost all electronic devices consume DC power, such as computers and mobile devices. To control and manage the energy, power measurement is essential. In this project, the student is going to design a digital wattmeter to measure DC current, DC voltage, and DC power of a DC load fed from a DC power supply. The digital wattmeter should include a LED display to show the measured data of the load (current, voltage, power). The voltage range of the load should be within 0-12 V (DC), while the power range of the load should be within 0-30 W (DC). Arduino or any kind of microprocessor can be used in the design. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1133 | Serkan Özbay | Microcontroller-based smart chess clock design | 2023 Spring | Sergen Micogullari, , , | |||
|
Title: Microcontroller-based smart chess clock design Overview of the project In this project, a microcontroller-based chess clock will be designed and constructed. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish. |
|||||||
| 1132 | Mete Vural | Thyristor based Full-Bridge AC-DC Converter with Arduino | 2023 Spring | Tugrul Kayaci, , , | |||
|
Title: Thyristor based Full-Bridge AC-DC Converter with Arduino Overview of the project AC-DC conversion or rectification is a crucial step in many applications such as renewable energy systems, electrical vehicles, energy storage systems, and etc. In this project, a variable DC voltage will be produced from a fixed single-phase AC source with a thyristor based full-bridge AC-DC converter. The advantage of this design over classical diode-based rectifiers is that the output DC voltage can be varied or controlled. The converter that is planned to be designed will consist of 4 thyristors. The firing signals of the thyristors will be generated by a compatible version of Arduino. By this way, the output DC voltage of the converter can be varied. To change the firing angle in real-time, a potentiometer or any suitable method can be used in the design. To decrease the input voltage of the converter, a step-down transformer can be used at the input of the design. The reduce ripple factor, a capacitor or any suitable filtering can be used at the output. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1129 | Tolgay Kara | Using wearable technology for the good of humanity | 2023 Spring | Kifayet Reyyan Yildirim, , , | |||
|
Title: Using wearable technology for the good of humanity Overview of the project The project involves designing a wearable technological device with the specific aim of enhancing human life or environment. The student is free to design the wearable system but the good of humanity or environment should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1128 | Ali Osman Arslan | Development of single axis electromagnetic levitation system | 2023 Spring | Mehmet Furkan Bilbay, , , | |||
|
Title: Development of single axis electromagnetic levitation system Overview of the project In this project an electromagnetic levitation system will be designed to handle 100gr payload at a defined distance. Project must be containing a microcontroller and its software programming, distance sensor, electromagnet and useful load. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1126 | Ergun Erçelebi | Development of Frequency Counter Circuit | 2023 Spring | Mevlut Alperen Halal, , , | |||
|
Title: Development of Frequency Counter Circuit Overview of the project A frequency counter is a device that measures the frequency of signals. With the frequency measuring device to be developed in the project, the frequencies of the signals with a frequency of 0-25MHz will be measured. In the project, the student will design the embedded hardware and software, which are the requirements of the device. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 1125 | Ergun Erçelebi | Development of contactless Digital Tachometer using MSP430 type microcontroller | 2023 Spring | Mehmet Nuri Sevinc, , , | |||
|
Title: Development of contactless Digital Tachometer using MSP430 type microcontroller Overview of the project The tachometer is basically used to measure the angular velocity of a motor. It can be a mechanical device with a hot gear and spindle arrangement, or an electrical device that converts angular velocity into an electrical signal. The electric tachometer can be an AC tachometer or a DC tachometer, respectively. In the project the student will design hardware and software for contactless digital tachometer. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 1124 | Tolgay Kara | Wearable technology for better physical health | 2023 Spring | Perihan Berfin Cullanmak, , , | |||
|
Title: Wearable technology for better physical health Overview of the project The project involves designing a wearable technological device with the specific aim of preserving or improving physical health of the user. The student is free to design the wearable system but the physical health goal should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1122 | Ergun Erçelebi | Design of Buck-Boost converter | 2022 Fall | Mehmet Fatih Yilmaz, Hakan Akif Goysoy, Nihat Bayram, | |||
|
Title: Design of Buck-Boost converter Overview of the project
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1121 | Mahmut Aykaç | Coinstar | 2022 Fall | Ceylan Yilmaz, Ceren Tekatli, Sevda Oguz, | |||
|
Title: Coinstar Overview of the project The students are supposed to design and construct a system that senses the coins and calculates total amount of the money and sends the amount of the money information to a remote user through a wireless network What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1120 | Taner İnce | Autonomous robot | 2022 Fall | Ogulcan Ozdemir, Mehmet Sahinli, Mehmet Cinar, Abdulaziz Develioglu | |||
|
Title: Autonomous robot Overview of the project In this project the students will design an autonomous robot that is able to navigate on a closed route with traffic signs. The vehicle will have some specific cameras mounted on it to detect the signs. Detection of signs will be made using image processing and deep learning techniques/ What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1119 | Nurdal Watsuji | Autonomous robotic vehicle | 2022 Fall | Yusuf Taha Dastan, Mehmet Soganci, Abdulselam Demir, Mustafa Ozturkmen | |||
|
Title: Autonomous robotic vehicle Overview of the project An unmanned ground vehicle that can avoid obstacles and follow a line will be designed and constructed. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: Division of tasks: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1118 | Ali Osman Arslan | Development of avionic system for rocket | 2022 Fall | Halit Kucuk, Semih Ozek, Mehmet Enes Yeniekinci, | |||
|
Title: Development of avionic system for rocket Overview of the project
In this project an avionic system of the rocket will be designed. The
system must be measure the altitude, position and information, and any
specific data sought by the rockets during flight or after landing, on
the ground station and on the rocket's own computer. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1117 | Tolgay Kara | Personal Luggage Carrying Robot | 2022 Fall | Burak Ozcanli, Uygar Yilmaz, Emre Can Esmer, | |||
|
Title: Personal Luggage Carrying Robot Overview of the project In this project, an autonomous luggage carrying robot for personal use is to be designed and constructed with the purpose of lightening people's heavy loads at airports. This robot, which can carry all standard suitcase sized luggage, should detect the location of the user and follow them at a certain distance. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1116 | Uğur Cem Hasar | Design a Komi-Robot | 2022 Fall | Mirhat Ozkan, Onur Yeral, Hamit Gurgan, Harun Onat | |||
|
Title: Design a Komi-Robot Overview of the project A robot, which is named as Komi-Robot, will be designed to decrease the labor and to kame and autonomous process for serving in restaurants and coffees. The Kom-Robot, principally, will collect and then carry wastes or non-consumed goods on the tables. It will approach the tables by pre-defined patterns of ways on the floor and will collect wastes or non-consumed goods on the tables by observing the flag on the table and carry them the location specified in the restaurants and coffees to drop. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1115 | Savaş Uçkun | Remote Control System | 2022 Fall | Metehan Demir, Mehmet Ali Bagis, Mehmet Gunduz , | |||
|
Title: Remote Control System Overview of the project Remote controls are one of the most ubiquitous symbols of our modern technologies. It allows us to command our electronic devices efficiently and reliably. Remote controls commonly operates via infrared signals but sometimes by radio frequency signals. The remote control may control a variety of functions such as volume, channel, track number and other functions. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: |
|||||||
| 1114 | Mete Vural | Bluetooth Controlled Electric Crane | 2022 Fall | Ibrahim Kerem Zorer, Hatice Ezgi Turgut, Tunc Kunefeci, | |||
|
Title: Bluetooth Controlled Electric Crane Overview of the project Electric cranes powered by DC electric power are used in the industry to move and carry materials from one point into another. In this project, the team consisting of 4 students will design a 4-wheel electric-powered crane. The crane should be wirelessly controlled by a mobile phone or android tablet using Bluetooth wireless technology. The crane must lift 1kg-material around 50 cm high and must go front and back, also must rotate left and right with remote control. The other details can be discussed with the supervisor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1113 | Musa Bute | Designing a Wearable Biomedical Apparatus for patient with drooping eyelid | 2022 Fall | Selahattin Emre Gogebakan, Ali Sarica, Muhammed Etka Yasul, | |||
|
Title: Designing a Wearable Biomedical Apparatus for patient with drooping eyelid Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1112 | Musa Bute | Designing a telemetry system using Cansat | 2022 Fall | Ahmed Furkan Gumusbas, Serkan Ozkurt, Tolga Aynali, Hatice Adiguzel | |||
|
Title: Designing a telemetry system using Cansat Overview of the project Project Overview:
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools Division of tasks The completed project will be kept by the students to do with as they wish. |
|||||||
| 1111 | Musa Bute | Native Rov (Remotely Operated underwater Vehicle) pcb Design, Production and Control | 2022 Fall | Abdulkadir Aydemir, Kamil Yildiz, Harun Arslanlar, | |||
|
Title: Native Rov (Remotely Operated underwater Vehicle) pcb Design, Production and Control Overview of the project In this project a ROV (remotely operated underwater vehicle) pcb system will be designed, simulated, produced and experimentally tested. It is expected that this pcb system will control and automate ROV Systems. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks [for group projects] Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1108 | Arif Nacaroğlu | 3-D shape identifier | 2022 Fall | Yavuz Burhan Karadayi, , , | |||
|
Title: 3-D shape identifier Overview of the project In this project, items will be sorted due to their shapes. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1107 | Arif Nacaroğlu | 3-D shape identifier | 2023 Spring | Ahmad Alhelali, , , | |||
|
Title: 3-D shape identifier Overview of the project In this project, items will be sorted due to their shapes. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1106 | Arif Nacaroğlu | Holding robot | 2022 Fall | Hakan Gulucar, Abdullah Tarik Ercan, Derya Yildiz, | |||
|
Title: Holding robot Overview of the project In this project, 3 students will design and construct the mechanism to catch falling materials on a two-dimensional sliding base. The items (like small marbles) will drop arbitrarily from holes about 30-50 cm high from the base level and a sliding basket will catch the dropping marbles. The sliding basket will be run by some electrical motor which is excited by the signal coming from any sensors which are affected by the marbles. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1105 | Arif Nacaroğlu | Holding robot | 2022 Fall | Ahmed Suha Duman, Yusuf Bayarogullari, Muhammed Emin Ceylan, | |||
|
Title: Holding robot Overview of the project In this project, 3 students will design and construct the mechanism to catch falling materials on a two-dimensional sliding base. The items (like small marbles) will drop arbitrarily from holes about 30-50 cm high from the base level and a sliding basket will catch the dropping marbles. The sliding basket will be run by some electrical motor which is excited by the signal coming from any sensors which are affected by the marbles. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: Specific components/tools The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1104 | Mete Vural | Electric crane | 2022 Spring | Abdulbaki Caca, Ali Ayan, Vesile Demirok, Burak Aykan Sariyel | |||
|
Title: Electric crane Overview of the project Electric cranes powered by DC electric power are used in the industry to move and carry materials from one point into another. In this project, the team consisting of 4 students will design a 4-wheels electric-powered crane. The crane should be wirelessly controlled via an RF remote control unit. It must lift the 1kg-material around 50 cm high and must go front and back, also must rotate left and right. The other details can be discussed with the supervisor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1103 | Mete Vural | Electric crane | 2022 Spring | Burak Ahmet Parmaksiz, Murat Gokoglu, Ridvan Burc, Emine Busra Acici | |||
|
Title: Electric crane Overview of the project Electric cranes powered by DC electric power are used in the industry to move and carry materials from one point into another. In this project, the team consisting of 4 students will design a 4-wheels electric-powered crane. The crane should be wirelessly controlled via an RF remote control unit. It must lift the 1kg-material around 50 cm high and must go front and back, also must rotate left and right. The other details can be discussed with the supervisor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1102 | Mete Vural | Raspberry Pi Pico Based Digital Oscilloscope | 2023 Spring | Bahattin Yanik, , , | |||
|
Title: Raspberry Pi Pico Based Digital Oscilloscope Overview of the project In this project, A digital oscilloscope will be designed based on Raspberry Pi Pico DC loads are everywhere in our daily lives, as almost all electronic devices consume DC power, such as computers and mobile devices. To control and manage the energy, power measurement is essential. In this project, the student is going to design a digital wattmeter to measure DC current, DC voltage, and DC power of a DC load fed from a DC power supply. The digital wattmeter should include a LED display to show the measured data of the load (current, voltage, power). The voltage range of the load should be within 0-12 V (DC), while the power range of the load should be within 0-30 W (DC). Arduino or any kind of microprocessor can be used in the design. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1101 | Mete Vural | DC Power Meter Design | 2022 Fall | Sumeyye Yeprem, , , | |||
|
Title: DC Power Meter Design Overview of the project DC loads are everywhere in our daily lives, as almost all electronic devices consume DC power, such as computers and mobile devices. To control and manage the energy, power measurement is essential. In this project, the student is going to design a digital wattmeter to measure DC current, DC voltage, and DC power of a DC load fed from a DC power supply. The digital wattmeter should include a LED display to show the measured data of the load (current, voltage, power). The voltage range of the load should be within 0-12 V (DC), while the power range of the load should be within 0-30 W (DC). Arduino or any kind of microprocessor can be used in the design. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1099 | Serkan Özbay | Weapon detection system using deep learning on an embedded system for security applications | 2022 Fall | GûÑkhan Cayir, Hasan Huseyin Genc, Can Isildar, Mustafa Sihli Der | |||
|
Title: Weapon detection system using deep learning on an embedded system for security applications Overview of the project In this project, the purpose is to design a weapon (or gun) detection system using deep learning on an embedded system for security applications. The system will be constructed as video surveillance system and it needs to be implemented with an appropriate embedded system. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish. |
|||||||
| 1098 | Serkan Özbay | Microcontroller-based smart chess clock design | 2022 Fall | Sergen Micoogullari, , , | |||
|
Title: Microcontroller-based smart chess clock design Overview of the project In this project, a microcontroller-based chess clock will be designed and constructed. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish. |
|||||||
| 1097 | Serkan Özbay | Microcontroller-based smart chess clock design | 2023 Spring | Seher Turk, , , | |||
|
Title: Microcontroller-based smart chess clock design Overview of the project In this project, a microcontroller-based chess clock will be designed and constructed. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish. |
|||||||
| 1096 | Mahmut Aykaç | Real-Time Icy Road Detection | 2022 Spring | Berhan Katipoglu, Ibrahim Sismanoglu, Abdullah Bekir Yanardag, | |||
|
Title: Real-Time Icy Road Detection Overview of the project The students are supposed to design a system that detects the ice on the road to provide a safe drive. System must decide there is ice on the road by taking video streams and determines whether the drive on the specific portion on the road is safe or not What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1095 | Mahmut Aykaç | Real-Time Icy Road Detection | 2022 Fall | Ali Bozca, Mehmet Bal, Mehmet Bala, Muhammed Yasin Karakan | |||
|
Title: Real-Time Icy Road Detection Overview of the project The students are supposed to design a system that detects the ice on the road to provide a safe drive. System must decide there is ice on the road by taking video streams and determines whether the drive on the specific portion on the road is safe or not What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1092 | Mete Vural | Thyristor based Full-Bridge AC-DC Converter with Arduino | 2022 Fall | Alican Mengene, , , | |||
|
Title: Thyristor based Full-Bridge AC-DC Converter with Arduino Overview of the project AC-DC conversion or rectification is a crucial step in many applications such as renewable energy systems, electrical vehicles, energy storage systems, and etc. In this project, a variable DC voltage will be produced from a fixed single-phase AC source with a thyristor based full-bridge AC-DC converter. The advantage of this design over classical diode-based rectifiers is that the output DC voltage can be varied or controlled. The converter that is planned to be designed will consist of 4 thyristors. The firing signals of the thyristors will be generated by a compatible version of Arduino. By this way, the output DC voltage of the converter can be varied. To change the firing angle in real-time, a potentiometer or any suitable method can be used in the design. To decrease the input voltage of the converter, a step-down transformer can be used at the input of the design. The reduce ripple factor, a capacitor or any suitable filtering can be used at the output. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1091 | Mete Vural | Thyristor based Full-Bridge AC-DC Converter with Arduino | 2023 Spring | Esra Ceylan, , , | |||
|
Title: Thyristor based Full-Bridge AC-DC Converter with Arduino Overview of the project AC-DC conversion or rectification is a crucial step in many applications such as renewable energy systems, electrical vehicles, energy storage systems, and etc. In this project, a variable DC voltage will be produced from a fixed single-phase AC source with a thyristor based full-bridge AC-DC converter. The advantage of this design over classical diode-based rectifiers is that the output DC voltage can be varied or controlled. The converter that is planned to be designed will consist of 4 thyristors. The firing signals of the thyristors will be generated by a compatible version of Arduino. By this way, the output DC voltage of the converter can be varied. To change the firing angle in real-time, a potentiometer or any suitable method can be used in the design. To decrease the input voltage of the converter, a step-down transformer can be used at the input of the design. The reduce ripple factor, a capacitor or any suitable filtering can be used at the output. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1090 | Mete Vural | Person Detection via Machine Learning | 2022 Spring | Unal Cevik, Ahmet Muhammet Baskaya, Ahmet Bugra Yildirim, Kadir Sefa Ozdemir | |||
|
Title: Person Detection via Machine Learning Overview of the project In this project, real-time person detection via machine learning will be designed and implemented using Raspberry Pi Pico or any other compatible mini computer. The other required components for this project are;
The estimated budget of this project is 1125 TRL. A suitable machine learning algorithm from the literature will be adapted to the solution algorithm for real-time person detection problem. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1089 | Uğur Cem Hasar | Application of Artificial Neural Network for Material Characterization of Materials-2 | 2022 Fall | Kerem Karakoc, , , | |||
|
Title: Application of Artificial Neural Network for Material Characterization of Materials-2 Overview of the project Artificial neural network will be applied for determination of electromagnetic properties of materials What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 1088 | Uğur Cem Hasar | Application of Artificial Neural Network for Material Characterization of Materials-1 | 2023 Spring | Samet Karasu, , , | |||
|
Title: Application of Artificial Neural Network for Material Characterization of Materials-1 Overview of the project Artificial neural network will be applied for determination of electromagnetic properties of materials What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 1087 | Mete Vural | Person Detection via Machine Learning | 2022 Spring | Ahmet Mert Aksuvek, Hasan Basri Akpolat, Recep Zorlu, Selimhan Erten | |||
|
Title: Person Detection via Machine Learning Overview of the project In this project, real-time person detection via machine learning will be designed and implemented using Raspberry Pi Pico or any other compatible mini computer. The other required components for this project are;
The estimated budget of this project is 1125 TRL. A suitable machine learning algorithm from the literature will be adapted to the solution algorithm for real-time person detection problem. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1084 | Ergun Erçelebi | Development of Class Attendance System Based On Face Recognition Using Raspberry Mini Computer | 2023 Spring | Ammar Abdelrazek, , , | |||
|
Title: Development of Class Attendance System Based On Face Recognition Using Raspberry Mini Computer Overview of the project In the project, the student will develop class attendance tracking system based on face recognition using a mini computer. Library functions for image processing and recognition software from open source platforms can be used. Here, a target-oriented integrated system will be developed by bringing the existing software and system together. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1083 | Ergun Erçelebi | Development of Class Attendance System Based On Face Recognition Using Raspberry Mini Computer | 2023 Spring | Fuat Basman, , , | |||
|
Title: Development of Class Attendance System Based On Face Recognition Using Raspberry Mini Computer Overview of the project In the project, the student will develop class attendance tracking system based on face recognition using a mini computer. Library functions for image processing and recognition software from open source platforms can be used. Here, a target-oriented integrated system will be developed by bringing the existing software and system together. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1082 | Ergun Erçelebi | Development of Inductive Proximity Sensor | 2023 Spring | Pyae Phyo Kyaw, , , | |||
|
Title: Development of Inductive Proximity Sensor Overview of the project A inductive proximity sensor can detect metal targets approaching the sensor, without physical contact with the target. Inductive Proximity Sensors are roughly classified into the following three types according to the operating principle: the high-frequency oscillation type using electromagnetic induction, the magnetic type using a magnet, and the capacitance type using the change in capacitance. Generally, the inductive proximity sensor works as follows: a high-frequency magnetic field is created by the oscillator circuit by the sensor. When a metal target approaches the magnetic field, an induction current or eddy current is generated due to electromagnetic induction. As the target approaches the sensor, the eddy current will increase and the magnetic field produced by the oscillator circuit will decrease, and the load of the oscillator circuit will increase at the same time. By detecting and measuring these changes, both the proximity level and whether the target is metal are detected. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1081 | Ergun Erçelebi | Development of Inductive Proximity Sensor | 2023 Spring | Huseyin Ogul Ozturkmen, , , | |||
|
Title: Development of Inductive Proximity Sensor Overview of the project A inductive proximity sensor can detect metal targets approaching the sensor, without physical contact with the target. Inductive Proximity Sensors are roughly classified into the following three types according to the operating principle: the high-frequency oscillation type using electromagnetic induction, the magnetic type using a magnet, and the capacitance type using the change in capacitance. Generally, the inductive proximity sensor works as follows: a high-frequency magnetic field is created by the oscillator circuit by the sensor. When a metal target approaches the magnetic field, an induction current or eddy current is generated due to electromagnetic induction. As the target approaches the sensor, the eddy current will increase and the magnetic field produced by the oscillator circuit will decrease, and the load of the oscillator circuit will increase at the same time. By detecting and measuring these changes, both the proximity level and whether the target is metal are detected. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1080 | Sema Kayhan | Design of Luggage Tracking System | 2022 Fall | Ayse Semina Elci, , , | |||
|
Title: Design of Luggage Tracking System Overview of the project The aim of this project is to provide a system for people to track their suitcases, that is they carry with them during their travels from one place to another, in the most reliable way. In addition, with this system people will be able to both know the weight of their luggage and understand where their luggage is and whether they have been stolen. With this system people able to view the location of their suitcases. The GPS sensor and Arduino, will be placed in to the suitcase, will connect to the internet with the sim card module and send the location and weight information to the person's own account in the application. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1079 | Sema Kayhan | Design of Luggage Tracking System | 2022 Spring | Ahmed Hossam Moustafa Ahmed Elkassas, , , | |||
|
Title: Design of Luggage Tracking System Overview of the project The aim of this project is to provide a system for people to track their suitcases, that is they carry with them during their travels from one place to another, in the most reliable way. In addition, with this system people will be able to both know the weight of their luggage and understand where their luggage is and whether they have been stolen. With this system people able to view the location of their suitcases. The GPS sensor and Arduino, will be placed in to the suitcase, will connect to the internet with the sim card module and send the location and weight information to the person's own account in the application. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1078 | Nuran Doğru | Turkish Coffee Machine | 2023 Spring | Ayse Semina Elci, , , | |||
|
Title: Turkish Coffee Machine Overview of the project A Turkish coffee machine with the following features will be designed.
What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 1077 | Nuran Doğru | Turkish Coffee Machine | 2023 Spring | Alim Enes Sever, , , | |||
|
Title: Turkish Coffee Machine Overview of the project A Turkish coffee machine with the following features will be designed.
What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 1076 | Nuran Doğru | Ultrasonic Therapy Device | 2022 Spring | Kamil Yildiz, Bahattin Yanik, Sergen Micoogullari, | |||
|
Title: Ultrasonic Therapy Device Overview of the project Ultrasonic therapy device will be designed for physiotherapy patients considering the patient's age, surface of treatment, etc. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 1075 | Nuran Doğru | Ultrasonic Therapy Device | 2022 Fall | Mertcan Yilmaz, Berkay Mustu, Berkan Surmeli, | |||
|
Title: Ultrasonic Therapy Device Overview of the project Ultrasonic therapy device will be designed for physiotherapy patients considering the patient's age, surface of treatment, etc. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 1071 | Arif Nacaroğlu | Gap Crossing Autonomous Robot | 2022 Spring | Ibrahim Ek, Huseyin Salih Bayram, Gizem Kaya, | |||
|
Title: Gap Crossing Autonomous Robot Overview of the project The project is about to design and construct the 4 wheel vehicle which moves autonomuosly in the preset line and to cross (jumping, or..) the gap on the line. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: |
|||||||
| 1070 | Musa Bute | Cargo Box | 2021 Fall | Ibrahim Halil Yildirim, , , | |||
|
Title: Cargo Box Overview of the project Ensuring the safety of the cargo by without requiring the owner to be at the delivery point. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1068 | Ali Osman Arslan | Development of avionic system for rocket | 2022 Fall | Berkay Yalovac, Muhammet Cakici, Onur Anil Bozkurt, Berkcan Ciftci | |||
|
Title: Development of avionic system for rocket Overview of the project
In this project an avionic system of the rocket will be designed. The
system must be measure the altitude, position and information, and any
specific data sought by the rockets during flight or after landing, on
the ground station and on the rocket's own computer. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1067 | Ali Osman Arslan | Development of electronic speed controller for brushless dc motor | 2021 Fall | Bahattin Yanik, , , | |||
|
Title: Development of electronic speed controller for brushless dc motor Overview of the project In this project an electronic speed controller (ESC) will be designed for brushless dc motor. The motor speed must be controlled from zero to rated speed. Input of the ECS must be suitable for 2S or 3S LiPo battery. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1066 | Ali Osman Arslan | Development of Agricultural unmanned ground vehicle to detect and destroy harmful plant | 2021 Fall | Efe Berkay Serce, Hasan Yildiz, Ahmet Efe, | |||
|
Title: Development of Agricultural unmanned ground vehicle to detect and destroy harmful plant Overview of the project Unmanned Ground Vehicles are used in many applications such as military, police force and recently growing in agriculture industry. An AUGV will be designed in this project. It will be powered by a lithium battery and the average output voltage will be 12 V at no load. The vehicle must be able to move on rough terrain. It should be controlled by an rc controller or have autonomous mobility. It will detect predefined harmful plants and should be able to dispose of them by spraying them with pesticides. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1065 | Taner İnce | Wireless Patient Health Monitoring | 2021 Fall | Burak Uygur, , , | |||
|
Title: Wireless Patient Health Monitoring Overview of the project A device will be designed to record the temperature and heartbeat rate of a patient and transmit it wirelessly using RF technology. This device will be beneficial to doctors to avoid patients visit. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1064 | Taner İnce | Fingerprint based money safe | 2021 Fall | Zekeriya Gedik, , , | |||
|
Title: Fingerprint based money safe Overview of the project A fingerprint-based money safe will be designed. The designed safe will be opened by authenticated fingerprint of the owner and also, the safe will be opened using a password. In the case of emergency situations, the safe should be opened wireless securely based on a secure transmission protocol. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1063 | Ergun Erçelebi | Development of Frequency Counter Circuit | 2021 Fall | Kaan Lo, , , | |||
|
Title: Development of Frequency Counter Circuit Overview of the project A frequency counter is a device that measures the frequency of signals. With the frequency measuring device to be developed in the project, the frequencies of the signals with a frequency of 0-25MHz will be measured. In the project, the student will design the embedded hardware and software, which are the requirements of the device. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 1062 | Musa Bute | Designing a Conventional FM Radio Operating in the range 88 - 108 MHz | 2021 Fall | Abdulsamed Ciftcioglu, , , | |||
|
Title: Designing a Conventional FM Radio Operating in the range 88 - 108 MHz Overview of the project
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1060 | Tolgay Kara | Using wearable technology for the good of humanity | 2023 Spring | Sukru Demir, , , | |||
|
Title: Using wearable technology for the good of humanity Overview of the project The project involves designing a wearable technological device with the specific aim of enhancing human life or environment. The student is free to design the wearable system but the good of humanity or environment should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1059 | Tolgay Kara | Satellite model with near real-time data transmission and processing | 2021 Fall | Emre Ozkaya, , , | |||
|
Title: Satellite model with near real-time data transmission and processing Overview of the project A satellite model will be designed and constructed. Data collected by multiple sensors will be transmitted and processed in near real-time by the ground station. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1058 | Tolgay Kara | Stair-climbing autonomous rescue robot | 2022 Fall | Isbara Alp Acikgoz, Safak Erken, Gulay Beyda Atli, Zinnur Yildiz | |||
|
Title: Stair-climbing autonomous rescue robot Overview of the project An autonomous mobile robot that can effectively climb up and down the stairs will be designed and constructed. The robot will be used in rescue missions. It will be equipped with suitable sensors to find victims indoors. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1057 | Nurdal Watsuji | Hand gesture recognition based on image processing | 2021 Fall | Abdullah Mucahit Coban, , , | |||
|
Title: Hand gesture recognition based on image processing Overview of the project Gesture Recognition has a wide area of application including human machine interaction, sign language, etc. The captured image of hand gesture is pre-processed with some image processing methods, then classified with neural network classifier. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: |
|||||||
| 1056 | Mehmet Demir | Temperature measuring system using PT100 and STM nucleo board | 2021 Fall | Mehmet Nuri Pekacar, Agit Sevim, Cemal Dirican, | |||
|
Title: Temperature measuring system using PT100 and STM nucleo board Overview of the project In industrial plants, temperature measuring systems are very important for production process. PT100 temperature measuring sensors are commonly used for industrial machines. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1055 | Mete Vural | Bluetooth Controlled Farm Robot | 2021 Fall | Burak Sevik, Mehmet Ercin, Mucahit Sayin, Mehmet Zana Soner | |||
|
Title: Bluetooth Controlled Farm Robot Overview of the project Optimizing agriculture is a critical issue in the world when the sources are draining too fast. Remote observation of the plants in a farm can help the farmers in their work. In this project, a Bluetooth controlled farm robot will be designed by 4 students. The robot should be controlled remotely by a mobile phone or android tablet. The robot will have a solid platform having 4 wheels that enable the robot to move forward, backward, left, and right directions. There will be humidity and temperature sensors on the robot and these data will be transferred over Bluetooth to the mobile phone or android tablet. Moreover, a digital camera will be added on the robot. This camera will take photos of the plants and send the picture to the mobile phone or android tablet over Bluetooth. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1054 | Mete Vural | Inductive Wireless Charger Design | 2021 Fall | Ali Er, , , | |||
|
Title: Inductive Wireless Charger Design Overview of the project Air coupled inductors can transfer electrical power without any physical connection by means of magnetic fields. These wireless power transfer systems are currently being used and still under development in electrical vehicle applications. In this project, the student is going to design an inductive wireless charger. The transmitter (inverter) and the receiver (rectifier) parts will be designed and tested under different spacing options. The product is able to charge a mobile phone or a tablet at the end of the design. The expected rated output voltage under load is 5 V (DC). The minimum wireless power transfer is expected to be 5 W (DC) for a spacing of minimum 1.0 mm. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1053 | Mete Vural | Capacitive Wireless Charger Design | 2021 Fall | Tariq Durrani, , , | |||
|
Title: Capacitive Wireless Charger Design Overview of the project Electric fields can be used to transfer the electrical power without using a cable or a conductor. These systems are still open to de developed and under research, especially for wireless electric vehicle charging applications. In this project, the student is going to design a capacitive wireless charger. The transmitter (inverter) and the receiver (rectifier) parts will be designed and tested under different spacing options. The product is able to charge a mobile phone or a tablet at the end of the design. The expected rated output voltage under load is 5 V (DC). The minimum wireless power transfer is expected to be 5 W (DC) for a spacing of minimum 1.0 mm. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1052 | Mete Vural | Digital DC wattmeter Design | 2021 Fall | Ibrahim Bilgehan Dumrul, , , | |||
|
Title: Digital DC wattmeter Design Overview of the project DC loads are everywhere in our daily lives, as almost all electronic devices consume DC power, such as computers and mobile devices. To control and manage the energy, power measurement is essential. In this project, the student is going to design a digital wattmeter to measure DC current, DC voltage, and DC power of a DC load fed from a DC power supply. The digital wattmeter should include a LED display to show the measured data of the load (current, voltage, power). The voltage range of the load should be within 0-12 V (DC), while the power range of the load should be within 0-30 W (DC). Arduino or any kind of microprocessor can be used in the design. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1051 | Serkan Özbay | Autonomous room cleaning robot | 2022 Spring | Kubra Ozgur, Merve Hazal Dogru, Fatma Demir, Omer Faruk Kirvar | |||
|
Title: Autonomous room cleaning robot Overview of the project In this project, the purpose is to design a room cleaning robot that moves around the room avoiding obstacles, picking up dust and wiping the floor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 1050 | Serkan Özbay | Design of touchless smart trash bin | 2021 Fall | Furkan Asefler, , , | |||
|
Title: Design of touchless smart trash bin Overview of the project In this project, the purpose is to design an automatic and touchless trash bin which opens its lid if it sees any rubbish in front of it and closes its lid after a certain delay. It will also alert when the bin is full. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 1049 | Serkan Özbay | Hand wash system for the kids | 2021 Fall | Ali Fuat Ucar, , , | |||
|
Title: Hand wash system for the kids Overview of the project In this project, the purpose is to design an automatic hand wash system for the kids. The system will operate the soap dispenser and wash dispenser without any touch by the users. The system will also include timer for ensuring to have enough amount of time for lathering. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 1048 | Serkan Özbay | Self balancing robot design | 2022 Fall | Ilayda Atalik, Elif Kubra Halacoglu, Melih Muhammed Balta, | |||
|
Title: Self balancing robot design Overview of the project In this project, the purpose is to design a two-wheeled self balancing robot. The main objective of the robot will be to balance the whole on two wheels automatically. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 1047 | Serkan Özbay | Motion Sensing Camera Base Design | 2021 Fall | Deniz Can Ilgin, , , | |||
|
Title: Motion Sensing Camera Base Design Overview of the project In this project, the purpose is to design a motion sensing camera base system which automatically detects and tracks the motion to wherever the motion is detected. The designed system will use motion sensor(s) and servo motor to rotate a camera and to ensure it will always track the action. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 1046 | Uğur Cem Hasar | Design a Microwave Sensor with Flexible Metamaterial Resonators-1 | 2023 Spring | Cemal Ucan, , , | |||
|
Title: Design a Microwave Sensor with Flexible Metamaterial Resonators-1 Overview of the project Design a microwave sensor with Flexible Metamaterial resonator structure using a 3D electromagnetic simulation program CST Microwave Studio (a full 3D electromagnetic simulation program). The student can select his/her design by himself/herself after the supervisor gives few examples. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 1045 | Sema Kayhan | Machine Learning Based Fire Detection System | 2022 Fall | Eyup Yildiz, , , | |||
|
Title: Machine Learning Based Fire Detection System Overview of the project There are two main types of household fire fast flaming fires, and slow smoldering fires Smoke detectors are typically only optimized for detecting one of these types of fires and perform poorly in detecting the other type In worst case scenarios, some smoke detectors have been found to only detect fire types they aren't optimized for after upwards of 30 minutes. In this project, both fast flaming fire and slow smoldering fire will be detecting using a camera, IR sensors, UV sensors, and a thermometer. When the flame is detected acording to output of sensors and visual flame detection results, machine learning based fire detection system 1)classify fast-flaming fire and slow-smoldering fire using neural network or another machine learning algorithm 2) ) Notify the user in the case of fire by communicating either via WiFi with user's personal device (I.e. PC, laptop, phone) or an alert message will be sent to the user via short message service (SMS) via GSM module, and also send the type of fire and a picture of the fire. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1044 | Sema Kayhan | Smart Fire Detection System I | 2021 Fall | Irem Burcu Aksahin, , , | |||
|
Title: Smart Fire Detection System I Overview of the project There are two main types of household fire fast flaming fires, and slow smoldering fires Smoke detectors are typically only optimized for detecting one of these types of fires and perform poorly in detecting the other type In worst case scenarios, some smoke detectors have been found to only detect fire types they aren't optimized for after upwards of 30 minutes. In this project, both fast flaming fire and slow smoldering fire will be detecting using a camera, IR sensors, UV sensors, and a thermometer. Microcontroller/PIC can be used as controller. When the flame is detected acording to output of sensors and visual flame detection results, the visual fire detection system 1)classify fast-flaming fire and slow-smoldering fire using image processing metods 2) Notify the user in the case of fire by communicating either via WiFi with user's personal device (I.e. PC, laptop, phone) or an alert message will be sent to the user via short message service (SMS) via GSM module, and also send the type of fire and a picture of the fire. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1043 | Sema Kayhan | Smart Floor Car Parking System | 2022 Fall | Selam Can Duru, Meryem Aysenur Uslu, Kevser Korkmaz, | |||
|
Title: Smart Floor Car Parking System Overview of the project In smart parking systems a car is parked without the driver entering into the carpark. The basic operation is that the vehicle comes in /on to the pallet(elevator), then according to the information received from the sensors, the vehicle is automatically parked into the empty spaces without a driver with the help of a pallet. Here, the pallet's going up and down, the movements in x and y coordinates can be provided with the help of a suitable controllers. Position of the cabin is determined with respect to states of border switches. All the processes in the system will be controlled by PLC/PIC/microcontroller. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1042 | Gölge Öğücü | Solar Panel Cleaner | 2021 Fall | Burak Aykan Sariyel, , , | |||
|
Title: Solar Panel Cleaner Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 1041 | Gölge Öğücü | Self cleaning room | 2022 Fall | Abdulkadir Bay, Davut Seker, Yigit Celik, | |||
|
Title: Self cleaning room Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 1040 | Sema Kayhan | Smart Home Automation | 2021 Fall | Batuhan Karakoca, Kenan Ay, Cuma Gogebakan, | |||
|
Title: Smart Home Automation Overview of the project The aim of this smart home automation project is to help disabled and elderly people to control their electrically controllable devices at home with a smart phone or computer. The advantages of this project for people will be able to instantly monitor all kinds of changes in the house, the visitors who come to the house can be seen and recognized from the camera, the street door can be opened with a single button, the alarm will sound in case of any possible security violations, and the panic button will allow the person to relatives will be informed. In terms of flexibility, smart sockets can be used in the project and thus communication will be ensured by triggering the relay over Wi-Fi with every electrical device. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1039 | Gölge Öğücü | Lock Operating with Voice | 2021 Fall | Haldun Budak, Ali Bayambudak, Ertugrul Harun Karapinar, Furkan Beyaz | |||
|
Title: Lock Operating with Voice Overview of the project What is the design in this project? Design of a door lock with an app in a phone contains different design and analysis steps What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 1038 | Seydi Kaçmaz | Human Emotion Recognition | 2021 Fall | Ahmad Deari Ahmed, , , | |||
|
Title: Human Emotion Recognition Overview of the project Build an emotion detection system to sense six main facial emotions: happiness, sadness, anger, fear, disgust, and surprise. Essentially, this project will be divided into three phases: Image Pre-processing, Feature Extraction, and Feature Classification. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 1037 | Seydi Kaçmaz | Business Card Scanner | 2021 Fall | Muhammed Ikbal Hokenek, , , | |||
|
Title: Business Card Scanner Overview of the project Develop a business card scanner using the OCR (Optical Character Recognition) technology. Your system should find and extract information from business cards. Essentially, this project will be divided into three phases: image processing (noise cancellation), OCR (text extraction), and classification (classifying key properties). What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 1036 | Seydi Kaçmaz | LEGO Brick Sorter | 2022 Fall | Melike BelpáÝnar, Furkan Coskun, Bahri Cilengir, | |||
|
Title: LEGO Brick Sorter Overview of the project Design a machine that can reliably sort between 10ã20 types of LEGO bricks reliably without manual feeding using a image-based neural network classification model to detect and identify LEGO brick in real-time using a camera. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 1035 | Seydi Kaçmaz | QR Code-Based Vending Machine, ATM or LIFT | 2022 Spring | Emre Kalyenci, Muhammet Zarur, Mehmet Ilker Akgol, | |||
|
Title: QR Code-Based Vending Machine, ATM or LIFT Overview of the project While we still use the touch screen or button-based user interface for ATM, vending machines or lifts, contactless systems have become an essential requirement in the market these days. Therefore, we will be making a solution that displays user interface on the phone and can be thus used as an input to any device such as ATMs, vending machines, lifts or objects that require contactless interaction. Design a machine suitable for your purpose among the above written systems with qr code written on it. After scanning the QR code, user will access the machine's interface and make it do the operation he/she want. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 1034 | Taner İnce | Smart Room Temperature Controller | 2021 Fall | Resit Cengel, , , | |||
|
Title: Smart Room Temperature Controller Overview of the project A smart controller will be designed to maintain the room temperature at a specific range. If the room temperature is below or higher than the specified level. A fan or a heater will be operated. A fan to reduce temperature and a heater to increase the temperature. An LCD display will show the ambient temperature. Furthermore, temperature of the controller will also be adjusted remotely by gsm or other suitable protocols. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1033 | Taner İnce | Hand motion controlled robotic vehicle | 2021 Fall | Ahmet Bugra Acar, Ali Simsek, Mehmet Akbulut, | |||
|
Title: Hand motion controlled robotic vehicle Overview of the project The user will wear a glove to move the designed robot by hand movements to forward, backward, etc. The glow itself will contain a transmitter circuit that the commands will be transmitted to the robotic vehicle's receiver circuit. This project is beneficial to disabled persons such that the users do not have to push anything such as buttons. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1032 | Nurdal Watsuji | Signaling system of a four-way junction based on traffic density | 2021 Fall | Eren Yavuz, Ahmet Berat Kaya, Abdulhamit Kocaoglan, | |||
|
Title: Signaling system of a four-way junction based on traffic density Overview of the project A density based traffic signaling system of a 4-way junction will be designed and constructed. The traffic density of each direction is determined using IR sensors and green light duration will be adjusted based on congestion. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: |
|||||||
| 1031 | Nurdal Watsuji | TV remote controlled robot | 2021 Fall | Selen Nisa Cinal, Kadir Akil, Melis Basaran, | |||
|
Title: TV remote controlled robot Overview of the project A robotic vehicle controlled by a standard TV remote will be designed. IR sensor senses the IR signals transmitted by the remote. The sensor's data is conveyed to control unit which moves the robot as desired. The robot should move to all directions such as forward, backward, left and right. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: |
|||||||
| 1030 | Arif Nacaroğlu | Recorder of Breathing Pauses | 2021 Fall | Ibrahim Ayata, , , | |||
|
Title: Recorder of Breathing Pauses Overview of the project A device will be designed and constructed to detect the pauses of human breathing What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools |
|||||||
| 1029 | Mahmut Aykaç | Vintage Digital Photo Album | 2021 Fall | Harun Arslanlar, , , | |||
|
Title: Vintage Digital Photo Album Overview of the project The student is supposed to design and realize a digital photo album that allows the user to choose the genre of the photos by using the touch screen and displays the photos randomly. Photos must be categorized such as Nature, Movie, Music etc. and saved in an external storage device like SD Card. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1028 | Mahmut Aykaç | Logic Indicator Probe | 2021 Fall | Mahmut Kaplan, , , | |||
|
Title: Logic Indicator Probe Overview of the project The student is supposed to design and realize a logic probe that indicates logic value of the target point whether the signal is steady or not. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1027 | Mahmut Aykaç | Smart Music Player | 2021 Fall | Sultan Busegul Dogan, Bunyamin Can, Berna Gamze Eker, Kaan Mehmet Gokdemir | |||
|
Title: Smart Music Player Overview of the project The students are supposed to design and realize a smart music player that estimates the style or mood of the user and offers the next track or genre to play. The user must select a type of music (Classic, Rock, Pop etc.) from the list and the player plays the tracks from the selected genre. After a number of selections have been made, player will offer the user a style of music to play. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1026 | Nuran Doğru | Toaster design | 2021 Fall | Cemil Yardim, , , | |||
|
Title: Toaster design Overview of the project A toaster will be designed having
What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 1025 | Nuran Doğru | Robotic vehicle design avoiding from obstacles | 2021 Fall | Ali Katuc, , , | |||
|
Title: Robotic vehicle design avoiding from obstacles Overview of the project A robotic vehicle will be designed that avoids from obstacles. The vehicle must
What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 1024 | Nuran Doğru | Popcorn machine design | 2021 Fall | Alican Mengene, , , | |||
|
Title: Popcorn machine design Overview of the project A popcorn machine will be designed at low cost. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 1023 | Nuran Doğru | Prototype robot-vacuum cleaner | 2021 Fall | Muslum Yazgan, Muhammet Fatih Sahin, Ozgur Tural, | |||
|
Title: Prototype robot-vacuum cleaner Overview of the project A prototype robot-vacuum cleaner will be designed. The robot should be able to
What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be donated to the department for display or
lab.
|
|||||||
| 1022 | Musa Bute | Cargo Box | 2021 Fall | Batuhan Ulu, , , | |||
|
Title: Cargo Box Overview of the project Ensuring the safety of the cargo by without requiring the owner to be at the delivery point. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1020 | Ali Osman Arslan | Development of single axis electromagnetic levitation system | 2023 Spring | Huzeyfe Soylemez, , , | |||
|
Title: Development of single axis electromagnetic levitation system Overview of the project In this project an electromagnetic levitation system will be designed to handle 100gr payload at a defined distance. Project must be containing a microcontroller and its software programming, distance sensor, electromagnet and useful load. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1018 | Gölge Öğücü | 5G Transparent Antenna Design | 2021 Fall | Ahmet Muhammet Baskaya, , , | |||
|
Title: 5G Transparent Antenna Design Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 1016 | Ergun Erçelebi | Development of autonomous floor vacuum cleaner robot | 2022 Spring | Mehmet Resit Cengel, Sedat Mizmizlioglu, Kaan Lo, | |||
|
Title: Development of autonomous floor vacuum cleaner robot Overview of the project Autonomous vacuum floor cleaning robot is a cleaning tool that moves on its own within a certain area without outside intervention and cleans floors with vacuum. The project is a group project. In the project, students will make original designs for the requirements of this tool. The project covers mechanical, embedded hardware and embedded software studies. The cleaning robot will act according to the map of the area to be cleaned, which is loaded into its memory, and it is expected to perform the cleaning function. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 1015 | Ergun Erçelebi | Development of Frequency Counter Circuit | 2023 Spring | Ali Ekrem Yalcin, , , | |||
|
Title: Development of Frequency Counter Circuit Overview of the project A frequency counter is a device that measures the frequency of signals. With the frequency measuring device to be developed in the project, the frequencies of the signals with a frequency of 0-25MHz will be measured. In the project, the student will design the embedded hardware and software, which are the requirements of the device. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 1014 | Ergun Erçelebi | Development of ultrasonic distance and level measurement system using ARM based microcontroller | 2021 Fall | Ali Ayan, , , | |||
|
Title: Development of ultrasonic distance and level measurement system using ARM based microcontroller Overview of the project Ultrasonic sound waves are vibrations at a frequency above the range of human hearing (>20kHz) that can pass through various media (air or liquid). Techniques such as time of flight or Doppler are used to measure flow, detect objects, perform concentration analysis and measure distances without making physical contact. Ultrasonic sensors can be used to detect a wide variety of materials, regardless of shape, transparency or color. The principle of operation of the ultrasonic sensor system is to use the ultrasonic pulses which are transmitted by the transducer to the surface to be monitored and are reflected back to the transducer, the time period between transmission and reception of the sound pulses is directly proportional to the distance between the transducer and surface, A micro-controller computes this time period for all echoes received and analyses them to determine which is the correct reflection from the material surface, it uses this data as the basis for giving control outputs and displays in usable engineering units. In this project student will develop hardware and software for ultrasonic distance and level measurement system. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 1013 | Ergun Erçelebi | Development of contactless Digital Tachometer using MSP430 type microcontroller | 2023 Spring | Ibrahim Kozat, , , | |||
|
Title: Development of contactless Digital Tachometer using MSP430 type microcontroller Overview of the project The tachometer is basically used to measure the angular velocity of a motor. It can be a mechanical device with a hot gear and spindle arrangement, or an electrical device that converts angular velocity into an electrical signal. The electric tachometer can be an AC tachometer or a DC tachometer, respectively. In the project the student will design hardware and software for contactless digital tachometer. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 1012 | Tolgay Kara | Wearable technology for better physical health | 2023 Spring | Ismail Yildirim, , , | |||
|
Title: Wearable technology for better physical health Overview of the project The project involves designing a wearable technological device with the specific aim of preserving or improving physical health of the user. The student is free to design the wearable system but the physical health goal should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1011 | Tolgay Kara | Using wearable technology for the good of humanity | 2021 Fall | Oguzhan Engizek, , , | |||
|
Title: Using wearable technology for the good of humanity Overview of the project The project involves designing a wearable technological device with the specific aim of enhancing human life or environment. The student is free to design the wearable system but the good of humanity or environment should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 1009 | Gölge Öğücü | 5G Transparent Antenna Design | 2023 Spring | Eyup Yildiz, , , | |||
|
Title: 5G Transparent Antenna Design Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 1008 | Uğur Cem Hasar | Design a Flexible Microwave Sensor for Detection of Water Adulteration in Honey | 2023 Fall | Agit Kilic, Bekir Furkan Coskun, Mehmet Husrev Cokgezer, Fayat Akinci | |||
|
Title: Design a Flexible Microwave Sensor for Detection of Water Adulteration in Honey Overview of the project Design a flexible microwave sensor unit for measuring water adulteration in honey samples and demonstrate its applicability. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 1007 | Uğur Cem Hasar | An Automated Free-Space Microwave Measurement System Using a MATLAB Graphical-User-Interface Program II | 2022 Spring | Derya Yildiz, Omer Cicek, Ayse Semina Elci, | |||
|
Title: An Automated Free-Space Microwave Measurement System Using a MATLAB Graphical-User-Interface Program II Overview of the project A free-space measurement system in the Microwave and Antennas Laboratory will be automated by arranging the horizontal (and vertical) distance between antennas using a written code in MATLAB. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 1005 | Sema Kayhan | Controlling an Elevator System with Image Processing | 2022 Fall | Mesut Imren, , , | |||
|
Title: Controlling an Elevator System with Image Processing Overview of the project This project will develop a new elevator control to save time and energy. The elavator prototype will be designed and controlled by PIC/PLC. The cameras placed on the floors take the pictures of the person or persons waiting for the elevator on the floors and densities of people on the floors are compared. With this comparison, the floor where the person density is high is determined. When the call signal comes from the elevator call buttons on the floors, the direction of movement of the elevator car is ensured to be towards the floor with the highest density of people. With the realization of these processes, the elevator worked less compared to the systems made in the past and the waiting time of the person or people waiting for the elevator was reduced. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 1004 | Seydi Kaçmaz | Virtual Drums | 2021 Fall | Onur Cetinkaya, , , | |||
|
Title: Virtual Drums Overview of the project Design a virtual drum that you can play by using a stick in the air. For this, the stick should be colored that you will use to locate the position of stick and when it reaches a certain position a drum sound would be played. A challenge is to also measure the sound intensity based on the speed of the stick movement. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 1003 | Taner İnce | X-Y plane precision sketcher | 2021 Fall | Ahmad Kadi, Noh Masri, Ahmad Hazzuri, | |||
|
Title: X-Y plane precision sketcher Overview of the project An automatic sketching machine will be designed. The designed system will sketch the figure given using a computer. The system will have two servo motors and a x-y plane system containing bears and belts to move the pen freely and precisely. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 1001 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2023 Spring | Bilal Beyoglu, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} Overview of the project Electromagnetic waves (EM waves) are composed of oscillating magnetic and electric fields. EM waves travel with a constant velocity of 3.00 x 108 m/s in vacuum. An electromagnetic wave can travel through anything - be it air, a solid material or vacuum. Electromagnetic waves bring energy into a system by way of their electric and magnetic fields. These fields can exert forces and move charges in the system and, thus, do work on them. However, there is energy in an electromagnetic wave itself, whether it is absorbed or not. Once created, the fields carry energy away from a source. If some of the energy is absorbed by the medium, the field strengths are decreased and anything left travels on. In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. The project will be proposed by the student.
What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 1000 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2023 Spring | Ali Tarik Ozbey, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} Overview of the project Electromagnetic waves (EM waves) are composed of oscillating magnetic and electric fields. EM waves travel with a constant velocity of 3.00 x 108 m/s in vacuum. An electromagnetic wave can travel through anything - be it air, a solid material or vacuum. Electromagnetic waves bring energy into a system by way of their electric and magnetic fields. These fields can exert forces and move charges in the system and, thus, do work on them. However, there is energy in an electromagnetic wave itself, whether it is absorbed or not. Once created, the fields carry energy away from a source. If some of the energy is absorbed by the medium, the field strengths are decreased and anything left travels on. In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. The project will be proposed by the student.
What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0999 | Nurdal Watsuji | Flower classification using artificial neural network based image processing | 2021 Fall | Muhammed Furkan Ozguven, , , | |||
|
Title: Flower classification using artificial neural network based image processing Overview of the project A dataset of images of five different flowers is formed. The features of flowers that will be used in classification and type of neural network is determined. The neural network is trained and tested using the dataset. You may use any software platform for this project. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: |
|||||||
| 0998 | Arif Nacaroğlu | Design and construction of the OTA-Oscillators | 2021 Fall | Muhammed Fatih Yilmaz, , , | |||
|
Title: Design and construction of the OTA-Oscillators Overview of the project In this project the oscillator will be designed and constructed. The main electronic component in the project will be Operational Transconductance Amplifier(OTA). What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools |
|||||||
| 0997 | Mahmut Aykaç | Morse to Text and Speech Translator | 2021 Fall | Sahin Tasdemir, , , | |||
|
Title: Morse to Text and Speech Translator Overview of the project The student is supposed to design and realize a system that inputs the Morse code and translates the code into text and speech. Text must be displayed on an LCD and the speech must be played from the speaker. (Text can be played character by character rather than a word or sentence and the speech must be saved in an external storage or the own memory of the MCU). What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0996 | Mahmut Aykaç | Save the water, save the world! | 2021 Fall | Mustafa Tintas, Muhammed Ali Demirhan, Mehmet Mustan, | |||
|
Title: Save the water, save the world! Overview of the project The students are supposed to design and realize a system that measures amount of flowing water from a water stream and periodically documents it wirelessly to a remote computer . In this document, total amount of water used, cost of it and/or anything that can be measured and calculated may be involved. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0995 | Musa Bute | Cargo Box | 2021 Fall | Sule Nur Turkmen, , , | |||
|
Title: Cargo Box Overview of the project Ensuring the safety of the cargo by without requiring the owner to be at the delivery point. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0994 | Musa Bute | AUTONOMOUS DELIVERY ROBOT | 2021 Fall | Berivan Nisa Kaya, Fadil Tac, Halil Yagmur, Muhammet Ali Sihanlioglu | |||
|
Title: AUTONOMOUS DELIVERY ROBOT Overview of the project In this project, an autonomous delivery robot can deliver documents and packets to special boxes by using robotic arm , stereo camera (lidar sensor) and radar will be developed What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0993 | Ali Osman Arslan | Development of avionic system for rocket | 2021 Fall | Mehmet Turemen, Cemil Zeyveli, Omer Yigithan Senvar, | |||
|
Title: Development of avionic system for rocket Overview of the project
In this project an avionic system of the rocket will be designed. The
system must be measure the altitude, position and information, and any
specific data sought by the rockets during flight or after landing, on
the ground station and on the rocket's own computer. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0992 | Ali Osman Arslan | Development of single axis electromagnetic levitation system | 2021 Fall | Burak Ahmet Parmaksiz, , , | |||
|
Title: Development of single axis electromagnetic levitation system Overview of the project In this project an electromagnetic levitation system will be designed to handle 100gr payload at a defined distance. Project must be containing a microcontroller and its software programming, distance sensor, electromagnet and useful load. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0991 | Ali Osman Arslan | Development of electronic speed controller for brushless dc motor | 2021 Fall | Mehmet Avci, , , | |||
|
Title: Development of electronic speed controller for brushless dc motor Overview of the project In this project an electronic speed controller (ESC) will be designed for brushless dc motor. The motor speed must be controlled from zero to rated speed. Input of the ECS must be suitable for 2S or 3S LiPo battery. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0990 | Ali Osman Arslan | Development of avionic system for rocket | 2021 Fall | Tayfur Cinar, Omer Dogan, Mustafa Cem Oflaz, | |||
|
Title: Development of avionic system for rocket Overview of the project
In this project an avionic system of the rocket will be designed. The
system must be measure the altitude, position and information, and any
specific data sought by the rockets during flight or after landing, on
the ground station and on the rocket's own computer. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0989 | Ali Osman Arslan | Development of Agricultural unmanned ground vehicle to detect and destroy harmful plant | 2021 Fall | Semanur Borucu, Aylin Serap Bozoglan, Ozlem Kizildeli, | |||
|
Title: Development of Agricultural unmanned ground vehicle to detect and destroy harmful plant Overview of the project Unmanned Ground Vehicles are used in many applications such as military, police force and recently growing in agriculture industry. An AUGV will be designed in this project. It will be powered by a lithium battery and the average output voltage will be 12 V at no load. The vehicle must be able to move on rough terrain. It should be controlled by an rc controller or have autonomous mobility. It will detect predefined harmful plants and should be able to dispose of them by spraying them with pesticides. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0987 | Gölge Öğücü | 5G Transparent Antenna Design | 2023 Spring | Gokhan Cevirici, , , | |||
|
Title: 5G Transparent Antenna Design Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0986 | Taner İnce | Wireless Patient Health Monitoring | 2021 Fall | Eyup Yildiz, , , | |||
|
Title: Wireless Patient Health Monitoring Overview of the project A device will be designed to record the temperature and heartbeat rate of a patient and transmit it wirelessly using RF technology. This device will be beneficial to doctors to avoid patients visit. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0985 | Taner İnce | Fingerprint based money safe | 2021 Fall | Bekir Sitki Aydin, , , | |||
|
Title: Fingerprint based money safe Overview of the project A fingerprint-based money safe will be designed. The designed safe will be opened by authenticated fingerprint of the owner and also, the safe will be opened using a password. In the case of emergency situations, the safe should be opened wireless securely based on a secure transmission protocol. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0984 | Mehmet Demir | Telemetry data and video transmission for a model satellite system | 2021 Fall | Anil Akbas, Furkan Keles, Huseyin Bayir, | |||
|
Title: Telemetry data and video transmission for a model satellite system Overview of the project In this project, Wireless communication modules should be used to send telemetry data and image to the ground station. In telemetry data should include temperature, pressure, height and location. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0983 | Ergun Erçelebi | Development of continuous positive airway pressure ventilator | 2022 Fall | Yakup Uzun, Abdulkadir Acar, Ertugrul Ozcetin, | |||
|
Title: Development of continuous positive airway pressure ventilator Overview of the project Continuous Positive Airway Pressure (CPAP) ventilation remains the mainstay treatment for obstructive sleep apnea syndrome (OSAS). In addition, it continues to be used for patients with covid, as they have difficulty in breathing due to the involvement of the virus in the lung. Good pressure stability and pressure reduction during exhalation are essential to ensure the clinical efficacy and comfort of CPAP therapy. In the project, students will design an experimental CPAP ventilator using an application-specific CPAP blower/motor assembly and a microprocessor. A composite control approach that includes a feedforward compensator and a feedback proportional-integral-derivative (PID) compensator will be used to regulate pressure delivered to OSAS patients to minimize pressure variations caused by spontaneous breathing and the uncomfortable sensation of exhaling versus positive pressure. It is recommended to use the Ziegler and Nichols method to set the PID controller parameters! The CPAP system consists of a microcontoller, a pressure sensor, a brushless DC motor integrated with a blower, motor controller, flexible tubing and a nose mask. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 0982 | Ergun Erçelebi | Development of autonomous floor vacuum cleaner robot | 2021 Fall | Resit Kagan Arslan, Ahmet Karayun, Ethem Burak Andi, | |||
|
Title: Development of autonomous floor vacuum cleaner robot Overview of the project Autonomous vacuum floor cleaning robot is a cleaning tool that moves on its own within a certain area without outside intervention and cleans floors with vacuum. The project is a group project. In the project, students will make original designs for the requirements of this tool. The project covers mechanical, embedded hardware and embedded software studies. The cleaning robot will act according to the map of the area to be cleaned, which is loaded into its memory, and it is expected to perform the cleaning function. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 0981 | Ergun Erçelebi | Development of Frequency Counter Circuit | 2021 Fall | Mustafa Koc, , , | |||
|
Title: Development of Frequency Counter Circuit Overview of the project A frequency counter is a device that measures the frequency of signals. With the frequency measuring device to be developed in the project, the frequencies of the signals with a frequency of 0-25MHz will be measured. In the project, the student will design the embedded hardware and software, which are the requirements of the device. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 0980 | Ergun Erçelebi | Development of ultrasonic distance and level measurement system using ARM based microcontroller | 2021 Fall | Emre Can Kizilates, , , | |||
|
Title: Development of ultrasonic distance and level measurement system using ARM based microcontroller Overview of the project Ultrasonic sound waves are vibrations at a frequency above the range of human hearing (>20kHz) that can pass through various media (air or liquid). Techniques such as time of flight or Doppler are used to measure flow, detect objects, perform concentration analysis and measure distances without making physical contact. Ultrasonic sensors can be used to detect a wide variety of materials, regardless of shape, transparency or color. The principle of operation of the ultrasonic sensor system is to use the ultrasonic pulses which are transmitted by the transducer to the surface to be monitored and are reflected back to the transducer, the time period between transmission and reception of the sound pulses is directly proportional to the distance between the transducer and surface, A micro-controller computes this time period for all echoes received and analyses them to determine which is the correct reflection from the material surface, it uses this data as the basis for giving control outputs and displays in usable engineering units. In this project student will develop hardware and software for ultrasonic distance and level measurement system. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 0979 | Ergun Erçelebi | Development of contactless Digital Tachometer using MSP430 type microcontroller | 2021 Fall | Oylum Samsum, , , | |||
|
Title: Development of contactless Digital Tachometer using MSP430 type microcontroller Overview of the project The tachometer is basically used to measure the angular velocity of a motor. It can be a mechanical device with a hot gear and spindle arrangement, or an electrical device that converts angular velocity into an electrical signal. The electric tachometer can be an AC tachometer or a DC tachometer, respectively. In the project the student will design hardware and software for contactless digital tachometer. Other details about the project will be given during the meeting with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish or donated to the department for display or lab.
|
|||||||
| 0978 | Musa Bute | Designing a Conventional FM Radio Operating in the range 88 - 108 MHz | 2021 Fall | Berke Tamucin, , , | |||
|
Title: Designing a Conventional FM Radio Operating in the range 88 - 108 MHz Overview of the project
What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0977 | Musa Bute | Fire Detection and Extinguishing by UAV (Unmanned Aerial Vehicle) | 2021 Fall | Omer Faruk Paker, Emre Tasar, Kadirhan Unver, | |||
|
Title: Fire Detection and Extinguishing by UAV (Unmanned Aerial Vehicle) Overview of the project With its Pixhawk and GPS systems, rotary wing UAV (Unmanned Aerial Vehicle) will perform scanning flights in areas that may pose danger. It will detect the surrounding fires by using the images taken from the camera. If it detects a possible fire, it will approach the fire area from a safe distance and report the location of the flames to the fire response teams with the help of the GPS module. After giving the necessary information, if the fire is in the initial stage, it is aimed to extinguish the fire or to try to take control of it by the extinguishing equipment under our UAV. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0976 | Tolgay Kara | Wearable technology for better physical health | 2021 Fall | Yusuf Mert Polat, , , | |||
|
Title: Wearable technology for better physical health Overview of the project The project involves designing a wearable technological device with the specific aim of preserving or improving physical health of the user. The student is free to design the wearable system but the physical health goal should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0975 | Tolgay Kara | Using wearable technology for the good of humanity | 2021 Fall | Ceren Turk, , , | |||
|
Title: Using wearable technology for the good of humanity Overview of the project The project involves designing a wearable technological device with the specific aim of enhancing human life or environment. The student is free to design the wearable system but the good of humanity or environment should be clearly justified. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0974 | Tolgay Kara | Satellite model with near real-time data transmission and processing | 2021 Fall | Ali Simsek, , , | |||
|
Title: Satellite model with near real-time data transmission and processing Overview of the project A satellite model will be designed and constructed. Data collected by multiple sensors will be transmitted and processed in near real-time by the ground station. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0973 | Tolgay Kara | Amphibious search and rescue robot | 2022 Fall | Burak Uygur, Ibrahim Halil Zorkuscu, Ismail Kizikli, Mehmet Kas | |||
|
Title: Amphibious search and rescue robot Overview of the project An amphibious mobile robot that can effectively move on land and in water will be designed and constructed. The robot will be used in search and rescue missions. It will be equipped with suitable sensors to find victims outdoors in various environments. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0972 | Tolgay Kara | Stair-climbing autonomous rescue robot | 2021 Fall | Musa Yilmaz, Asircan Yavuz, Esat Kok, Can Kankilic | |||
|
Title: Stair-climbing autonomous rescue robot Overview of the project An autonomous mobile robot that can effectively climb up and down the stairs will be designed and constructed. The robot will be used in rescue missions. It will be equipped with suitable sensors to find victims indoors. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0971 | Nurdal Watsuji | Hand gesture recognition based on image processing | 2021 Fall | Eyup Tugrulhan Suna, , , | |||
|
Title: Hand gesture recognition based on image processing Overview of the project Gesture Recognition has a wide area of application including human machine interaction, sign language, etc. The captured image of hand gesture is pre-processed with some image processing methods, then classified with neural network classifier. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: |
|||||||
| 0970 | Mehmet Demir | Temperature measuring system using PT100 and STM nucleo board | 2021 Fall | Bilal Abukan, Fatih Budak, Mehmet Yilmaz Akbiyik, | |||
|
Title: Temperature measuring system using PT100 and STM nucleo board Overview of the project In industrial plants, temperature measuring systems are very important for production process. PT100 temperature measuring sensors are commonly used for industrial machines. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0969 | Mehmet Demir | Unmanned underwater system | 2021 Fall | Ezgi Berfin Avci, Merve Aslan, Emre Can Sonmez, | |||
|
Title: Unmanned underwater system Overview of the project Underwater investigation;it is carried out for various purposes such as protecting and examining natural resources in civil and military applications. A significant part of recent academic and industrial research has focused on the use of unmanned vehicles in order not to risk human life and to reduce costs in underwater or sea studies. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0968 | Mete Vural | Bluetooth Controlled Farm Robot | 2021 Fall | Veysel Can Karaduman, Muhammet Bogmak, Kaan Bulbul, Halil Ibrahim Erdogan | |||
|
Title: Bluetooth Controlled Farm Robot Overview of the project Optimizing agriculture is a critical issue in the world when the sources are draining too fast. Remote observation of the plants in a farm can help the farmers in their work. In this project, a Bluetooth controlled farm robot will be designed by 4 students. The robot should be controlled remotely by a mobile phone or android tablet. The robot will have a solid platform having 4 wheels that enable the robot to move forward, backward, left, and right directions. There will be humidity and temperature sensors on the robot and these data will be transferred over Bluetooth to the mobile phone or android tablet. Moreover, a digital camera will be added on the robot. This camera will take photos of the plants and send the picture to the mobile phone or android tablet over Bluetooth. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0967 | Mete Vural | Inductive Wireless Charger Design | 2021 Fall | Fuat Kayahan Cerihan, , , | |||
|
Title: Inductive Wireless Charger Design Overview of the project Air coupled inductors can transfer electrical power without any physical connection by means of magnetic fields. These wireless power transfer systems are currently being used and still under development in electrical vehicle applications. In this project, the student is going to design an inductive wireless charger. The transmitter (inverter) and the receiver (rectifier) parts will be designed and tested under different spacing options. The product is able to charge a mobile phone or a tablet at the end of the design. The expected rated output voltage under load is 5 V (DC). The minimum wireless power transfer is expected to be 5 W (DC) for a spacing of minimum 1.0 mm. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0966 | Mete Vural | Capacitive Wireless Charger Design | 2021 Fall | Sahin Yasli, , , | |||
|
Title: Capacitive Wireless Charger Design Overview of the project Electric fields can be used to transfer the electrical power without using a cable or a conductor. These systems are still open to de developed and under research, especially for wireless electric vehicle charging applications. In this project, the student is going to design a capacitive wireless charger. The transmitter (inverter) and the receiver (rectifier) parts will be designed and tested under different spacing options. The product is able to charge a mobile phone or a tablet at the end of the design. The expected rated output voltage under load is 5 V (DC). The minimum wireless power transfer is expected to be 5 W (DC) for a spacing of minimum 1.0 mm. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0965 | Mete Vural | Digital DC wattmeter Design | 2021 Fall | Nese Seray Puli, , , | |||
|
Title: Digital DC wattmeter Design Overview of the project DC loads are everywhere in our daily lives, as almost all electronic devices consume DC power, such as computers and mobile devices. To control and manage the energy, power measurement is essential. In this project, the student is going to design a digital wattmeter to measure DC current, DC voltage, and DC power of a DC load fed from a DC power supply. The digital wattmeter should include a LED display to show the measured data of the load (current, voltage, power). The voltage range of the load should be within 0-12 V (DC), while the power range of the load should be within 0-30 W (DC). Arduino or any kind of microprocessor can be used in the design. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0964 | Serkan Özbay | Autonomous room cleaning robot | 2021 Fall | Huseyin Katircioglugil, Murat Ozcan, Maruf Ozmen, | |||
|
Title: Autonomous room cleaning robot Overview of the project In this project, the purpose is to design a room cleaning robot that moves around the room avoiding obstacles, picking up dust and wiping the floor. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0963 | Serkan Özbay | Design of touchless smart trash bin | 2021 Fall | Ilhan Furkan Kenanoglu, , , | |||
|
Title: Design of touchless smart trash bin Overview of the project In this project, the purpose is to design an automatic and touchless trash bin which opens its lid if it sees any rubbish in front of it and closes its lid after a certain delay. It will also alert when the bin is full. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0962 | Serkan Özbay | Hand wash system for the kids | 2021 Fall | Alperen Sahin, , , | |||
|
Title: Hand wash system for the kids Overview of the project In this project, the purpose is to design an automatic hand wash system for the kids. The system will operate the soap dispenser and wash dispenser without any touch by the users. The system will also include timer for ensuring to have enough amount of time for lathering. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0961 | Serkan Özbay | Self balancing robot design | 2021 Fall | Kagan Dogan, Arif Alan, Meliksah Esen, | |||
|
Title: Self balancing robot design Overview of the project In this project, the purpose is to design a two-wheeled self balancing robot. The main objective of the robot will be to balance the whole on two wheels automatically. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0960 | Serkan Özbay | Motion Sensing Camera Base Design | 2021 Fall | Halis Topcu, , , | |||
|
Title: Motion Sensing Camera Base Design Overview of the project In this project, the purpose is to design a motion sensing camera base system which automatically detects and tracks the motion to wherever the motion is detected. The designed system will use motion sensor(s) and servo motor to rotate a camera and to ensure it will always track the action. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0959 | Uğur Cem Hasar | Design a Microwave Sensor with Flexible Metamaterial Resonators-3 | 2021 Fall | Onur Burak Akharman, , , | |||
|
Title: Design a Microwave Sensor with Flexible Metamaterial Resonators-3 Overview of the project Design a microwave sensor with Flexible Metamaterial resonator structure using a 3D electromagnetic simulation program CST Microwave Studio (a full 3D electromagnetic simulation program). The student can select his/her design by himself/herself after the supervisor gives few examples. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0958 | Uğur Cem Hasar | Design a Microwave Sensor with Flexible Metamaterial Resonators-2 | 2021 Fall | Devrancan Yokus, , , | |||
|
Title: Design a Microwave Sensor with Flexible Metamaterial Resonators-2 Overview of the project Design a microwave sensor with Flexible Metamaterial resonator structure using a 3D electromagnetic simulation program CST Microwave Studio (a full 3D electromagnetic simulation program). The student can select his/her design by himself/herself after the supervisor gives few examples. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0957 | Uğur Cem Hasar | Design a Microwave Sensor with Flexible Metamaterial Resonators-1 | 2021 Fall | Ramazan Sireci, , , | |||
|
Title: Design a Microwave Sensor with Flexible Metamaterial Resonators-1 Overview of the project Design a microwave sensor with Flexible Metamaterial resonator structure using a 3D electromagnetic simulation program CST Microwave Studio (a full 3D electromagnetic simulation program). The student can select his/her design by himself/herself after the supervisor gives few examples. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0954 | Sema Kayhan | Machine Learning Based Fire Detection System | 2021 Fall | Yusuf Cemiloglu, , , | |||
|
Title: Machine Learning Based Fire Detection System Overview of the project There are two main types of household fire fast flaming fires, and slow smoldering fires Smoke detectors are typically only optimized for detecting one of these types of fires and perform poorly in detecting the other type In worst case scenarios, some smoke detectors have been found to only detect fire types they aren't optimized for after upwards of 30 minutes. In this project, both fast flaming fire and slow smoldering fire will be detecting using a camera, IR sensors, UV sensors, and a thermometer. When the flame is detected acording to output of sensors and visual flame detection results, machine learning based fire detection system 1)classify fast-flaming fire and slow-smoldering fire using neural network or another machine learning algorithm 2) ) Notify the user in the case of fire by communicating either via WiFi with user's personal device (I.e. PC, laptop, phone) or an alert message will be sent to the user via short message service (SMS) via GSM module, and also send the type of fire and a picture of the fire. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0953 | Sema Kayhan | Smart Fire Detection System I | 2021 Fall | Kerem Karakoc, , , | |||
|
Title: Smart Fire Detection System I Overview of the project There are two main types of household fire fast flaming fires, and slow smoldering fires Smoke detectors are typically only optimized for detecting one of these types of fires and perform poorly in detecting the other type In worst case scenarios, some smoke detectors have been found to only detect fire types they aren't optimized for after upwards of 30 minutes. In this project, both fast flaming fire and slow smoldering fire will be detecting using a camera, IR sensors, UV sensors, and a thermometer. Microcontroller/PIC can be used as controller. When the flame is detected acording to output of sensors and visual flame detection results, the visual fire detection system 1)classify fast-flaming fire and slow-smoldering fire using image processing metods 2) Notify the user in the case of fire by communicating either via WiFi with user's personal device (I.e. PC, laptop, phone) or an alert message will be sent to the user via short message service (SMS) via GSM module, and also send the type of fire and a picture of the fire. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0952 | Sema Kayhan | Smart Floor Car Parking System | 2021 Fall | Vedat Acar, Onur Arslan, Doguhan Pinar, | |||
|
Title: Smart Floor Car Parking System Overview of the project In smart parking systems a car is parked without the driver entering into the carpark. The basic operation is that the vehicle comes in /on to the pallet(elevator), then according to the information received from the sensors, the vehicle is automatically parked into the empty spaces without a driver with the help of a pallet. Here, the pallet's going up and down, the movements in x and y coordinates can be provided with the help of a suitable controllers. Position of the cabin is determined with respect to states of border switches. All the processes in the system will be controlled by PLC/PIC/microcontroller. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0951 | Gölge Öğücü | Solar Panel Cleaner | 2021 Fall | Hakan Pampal, , , | |||
|
Title: Solar Panel Cleaner Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0950 | Gölge Öğücü | Self cleaning room | 2021 Fall | Umut Can Karaca, Cumhur Melcik, Ugurcan Kasap, | |||
|
Title: Self cleaning room Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0949 | Sema Kayhan | Smart Home Automation | 2021 Fall | Omer Dagli, Onder Arca, Mehmet Can Dincer, | |||
|
Title: Smart Home Automation Overview of the project The aim of this smart home automation project is to help disabled and elderly people to control their electrically controllable devices at home with a smart phone or computer. The advantages of this project for people will be able to instantly monitor all kinds of changes in the house, the visitors who come to the house can be seen and recognized from the camera, the street door can be opened with a single button, the alarm will sound in case of any possible security violations, and the panic button will allow the person to relatives will be informed. In terms of flexibility, smart sockets can be used in the project and thus communication will be ensured by triggering the relay over Wi-Fi with every electrical device. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0948 | Gölge Öğücü | Lock Operating with Voice | 2021 Fall | Emre Kocaoglanligil, Busra Altuntas, Ayse Nur Dabaniyasti, Enes Yildirim | |||
|
Title: Lock Operating with Voice Overview of the project What is the design in this project? Design of a door lock with an app in a phone contains different design and analysis steps What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks:
Specific components/tools:
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0947 | Sema Kayhan | Controlling an Elevator System with Image Processing | 2022 Spring | Abdulkadir Bay, Adem Gurler, Abdulsamed Cifcioglu, | |||
|
Title: Controlling an Elevator System with Image Processing Overview of the project This project will develop a new elevator control to save time and energy. The elavator prototype will be designed and controlled by PIC/PLC. The cameras placed on the floors take the pictures of the person or persons waiting for the elevator on the floors and densities of people on the floors are compared. With this comparison, the floor where the person density is high is determined. When the call signal comes from the elevator call buttons on the floors, the direction of movement of the elevator car is ensured to be towards the floor with the highest density of people. With the realization of these processes, the elevator worked less compared to the systems made in the past and the waiting time of the person or people waiting for the elevator was reduced. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0946 | Seydi Kaçmaz | Virtual Drums | 2021 Fall | Kubra Ozgur, , , | |||
|
Title: Virtual Drums Overview of the project Design a virtual drum that you can play by using a stick in the air. For this, the stick should be colored that you will use to locate the position of stick and when it reaches a certain position a drum sound would be played. A challenge is to also measure the sound intensity based on the speed of the stick movement. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0945 | Seydi Kaçmaz | Human Emotion Recognition | 2021 Fall | Ali Yagdiran, , , | |||
|
Title: Human Emotion Recognition Overview of the project Build an emotion detection system to sense six main facial emotions: happiness, sadness, anger, fear, disgust, and surprise. Essentially, this project will be divided into three phases: Image Pre-processing, Feature Extraction, and Feature Classification. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0944 | Seydi Kaçmaz | Business Card Scanner | 2021 Fall | Ali Dogan, , , | |||
|
Title: Business Card Scanner Overview of the project Develop a business card scanner using the OCR (Optical Character Recognition) technology. Your system should find and extract information from business cards. Essentially, this project will be divided into three phases: image processing (noise cancellation), OCR (text extraction), and classification (classifying key properties). What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0943 | Seydi Kaçmaz | LEGO Brick Sorter | 2021 Fall | Enes Cengiz, Enver Ucar, Dogus Yaldiz, | |||
|
Title: LEGO Brick Sorter Overview of the project Design a machine that can reliably sort between 10ã20 types of LEGO bricks reliably without manual feeding using a image-based neural network classification model to detect and identify LEGO brick in real-time using a camera. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0942 | Seydi Kaçmaz | QR Code-Based Vending Machine, ATM or LIFT | 2021 Fall | Nael Alsaleh, Omar Mohamed, Reaam Almohamad, | |||
|
Title: QR Code-Based Vending Machine, ATM or LIFT Overview of the project While we still use the touch screen or button-based user interface for ATM, vending machines or lifts, contactless systems have become an essential requirement in the market these days. Therefore, we will be making a solution that displays user interface on the phone and can be thus used as an input to any device such as ATMs, vending machines, lifts or objects that require contactless interaction. Design a machine suitable for your purpose among the above written systems with qr code written on it. After scanning the QR code, user will access the machine's interface and make it do the operation he/she want. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0941 | Taner İnce | Smart Room Temperature Controller | 2021 Fall | Alper Aldemir, , , | |||
|
Title: Smart Room Temperature Controller Overview of the project A smart controller will be designed to maintain the room temperature at a specific range. If the room temperature is below or higher than the specified level. A fan or a heater will be operated. A fan to reduce temperature and a heater to increase the temperature. An LCD display will show the ambient temperature. Furthermore, temperature of the controller will also be adjusted remotely by gsm or other suitable protocols. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0940 | Taner İnce | X-Y plane precision sketcher | 2021 Fall | Bahadir Tacyildiz, Busra Gelmez, Rukiye Yildiz, | |||
|
Title: X-Y plane precision sketcher Overview of the project An automatic sketching machine will be designed. The designed system will sketch the figure given using a computer. The system will have two servo motors and a x-y plane system containing bears and belts to move the pen freely and precisely. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0939 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2023 Spring | Mesut Imren, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} Overview of the project Electromagnetic waves (EM waves) are composed of oscillating magnetic and electric fields. EM waves travel with a constant velocity of 3.00 x 108 m/s in vacuum. An electromagnetic wave can travel through anything - be it air, a solid material or vacuum. Electromagnetic waves bring energy into a system by way of their electric and magnetic fields. These fields can exert forces and move charges in the system and, thus, do work on them. However, there is energy in an electromagnetic wave itself, whether it is absorbed or not. Once created, the fields carry energy away from a source. If some of the energy is absorbed by the medium, the field strengths are decreased and anything left travels on. In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. The project will be proposed by the student.
What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0938 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2023 Spring | Adem Gurler, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} Overview of the project Electromagnetic waves (EM waves) are composed of oscillating magnetic and electric fields. EM waves travel with a constant velocity of 3.00 x 108 m/s in vacuum. An electromagnetic wave can travel through anything - be it air, a solid material or vacuum. Electromagnetic waves bring energy into a system by way of their electric and magnetic fields. These fields can exert forces and move charges in the system and, thus, do work on them. However, there is energy in an electromagnetic wave itself, whether it is absorbed or not. Once created, the fields carry energy away from a source. If some of the energy is absorbed by the medium, the field strengths are decreased and anything left travels on. In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. The project will be proposed by the student.
What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0937 | Taner İnce | Hand motion controlled robotic vehicle | 2021 Fall | Ahmed Nasr Abbas Shamsan Al-Qershi, Omar Khalid Mosleh Al-Thibany, Omar Saadeldin Saad Ellabban, | |||
|
Title: Hand motion controlled robotic vehicle Overview of the project The user will wear a glove to move the designed robot by hand movements to forward, backward, etc. The glow itself will contain a transmitter circuit that the commands will be transmitted to the robotic vehicle's receiver circuit. This project is beneficial to disabled persons such that the users do not have to push anything such as buttons. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools:
The project will be kept by the students to do with as they wish. |
|||||||
| 0936 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2021 Fall | Omer Faruk Kirvar, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} Overview of the project Electromagnetic waves (EM waves) are composed of oscillating magnetic and electric fields. EM waves travel with a constant velocity of 3.00 x 108 m/s in vacuum. An electromagnetic wave can travel through anything - be it air, a solid material or vacuum. Electromagnetic waves bring energy into a system by way of their electric and magnetic fields. These fields can exert forces and move charges in the system and, thus, do work on them. However, there is energy in an electromagnetic wave itself, whether it is absorbed or not. Once created, the fields carry energy away from a source. If some of the energy is absorbed by the medium, the field strengths are decreased and anything left travels on. In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. The project will be proposed by the student.
What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0935 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} | 2022 Fall | Omer Gulengul, Batuhan Erkmen, Ikbal Mustafa Demir, | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data. {Project title will be determined by the designers} Overview of the project Electromagnetic waves (EM waves) are composed of oscillating magnetic and electric fields. EM waves travel with a constant velocity of 3.00 x 108 m/s in vacuum. An electromagnetic wave can travel through anything - be it air, a solid material or vacuum. Electromagnetic waves bring energy into a system by way of their electric and magnetic fields. These fields can exert forces and move charges in the system and, thus, do work on them. However, there is energy in an electromagnetic wave itself, whether it is absorbed or not. Once created, the fields carry energy away from a source. If some of the energy is absorbed by the medium, the field strengths are decreased and anything left travels on. In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project.
What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0933 | Nurdal Watsuji | Flower classification using artificial neural network based image processing | 2021 Fall | Latif Bilgin, , , | |||
|
Title: Flower classification using artificial neural network based image processing Overview of the project A dataset of images of five different flowers is formed. The features of flowers that will be used in classification and type of neural network is determined. The neural network is trained and tested using the dataset. You may use any software platform for this project. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: |
|||||||
| 0932 | Nurdal Watsuji | Signaling system of a four-way junction based on traffic density | 2021 Fall | Yusuf Mutlu, Izmir Yilmaz, Fatma Ercan, | |||
|
Title: Signaling system of a four-way junction based on traffic density Overview of the project A density based traffic signaling system of a 4-way junction will be designed and constructed. The traffic density of each direction is determined using IR sensors and green light duration will be adjusted based on congestion. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: |
|||||||
| 0931 | Nurdal Watsuji | TV remote controlled robot | 2021 Fall | Batuhan Dogan, Mehmet Ali Donmez, Ali Bayram, | |||
|
Title: TV remote controlled robot Overview of the project A robotic vehicle controlled by a standard TV remote will be designed. IR sensor senses the IR signals transmitted by the remote. The sensor's data is conveyed to control unit which moves the robot as desired. The robot should move to all directions such as forward, backward, left and right. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: |
|||||||
| 0930 | Arif Nacaroğlu | Gap Crossing Autonomous Robot | 2021 Fall | Sultan Kenger, Mehmet Keten, Umit Can Ciddi, | |||
|
Title: Gap Crossing Autonomous Robot Overview of the project The project is about to design and construct the 4 wheel vehicle which moves autonomuosly in the preset line and to cross (jumping, or..) the gap on the line. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of Tasks: |
|||||||
| 0929 | Arif Nacaroğlu | Design and construction of the OTA-Oscillators | 2021 Fall | Numan Ozpinar, , , | |||
|
Title: Design and construction of the OTA-Oscillators Overview of the project In this project the oscillator will be designed and constructed. The main electronic component in the project will be Operational Transconductance Amplifier(OTA). What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools |
|||||||
| 0928 | Arif Nacaroğlu | Recorder of Breathing Pauses | 2021 Fall | Murat Toluk, , , | |||
|
Title: Recorder of Breathing Pauses Overview of the project A device will be designed and constructed to detect the pauses of human breathing What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools |
|||||||
| 0927 | Mahmut Aykaç | Vintage Digital Photo Album | 2021 Fall | Seda Nur Arik, , , | |||
|
Title: Vintage Digital Photo Album Overview of the project The student is supposed to design and realize a digital photo album that allows the user to choose the genre of the photos by using the touch screen and displays the photos randomly. Photos must be categorized such as Nature, Movie, Music etc. and saved in an external storage device like SD Card. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0926 | Mahmut Aykaç | Morse to Text and Speech Translator | 2021 Fall | Yusuf Enes Tuncay, , , | |||
|
Title: Morse to Text and Speech Translator Overview of the project The student is supposed to design and realize a system that inputs the Morse code and translates the code into text and speech. Text must be displayed on an LCD and the speech must be played from the speaker. (Text can be played character by character rather than a word or sentence and the speech must be saved in an external storage or the own memory of the MCU). What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0925 | Mahmut Aykaç | Logic Indicator Probe | 2021 Fall | Suleyman Eren Ersan, , , | |||
|
Title: Logic Indicator Probe Overview of the project The student is supposed to design and realize a logic probe that indicates logic value of the target point whether the signal is steady or not. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0924 | Mahmut Aykaç | Smart Music Player | 2021 Fall | Didem Celebi, Melisa Kanisirin, Yagmur Aras, Baran Karahan | |||
|
Title: Smart Music Player Overview of the project The students are supposed to design and realize a smart music player that estimates the style or mood of the user and offers the next track or genre to play. The user must select a type of music (Classic, Rock, Pop etc.) from the list and the player plays the tracks from the selected genre. After a number of selections have been made, player will offer the user a style of music to play. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0923 | Mahmut Aykaç | Save the water, save the world! | 2021 Fall | Erdi Gezer, Damla Ayran, Muhammet Huseyin Aksin, | |||
|
Title: Save the water, save the world! Overview of the project The students are supposed to design and realize a system that measures amount of flowing water from a water stream and periodically documents it wirelessly to a remote computer . In this document, total amount of water used, cost of it and/or anything that can be measured and calculated may be involved. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Division of tasks: Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0922 | Nuran Doğru | Toaster design | 2021 Fall | Kadir Sefa Ozdemir, , , | |||
|
Title: Toaster design Overview of the project A toaster will be designed having
What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 0921 | Nuran Doğru | Robotic vehicle design avoiding from obstacles | 2021 Fall | Ahmet Simsek, , , | |||
|
Title: Robotic vehicle design avoiding from obstacles Overview of the project A robotic vehicle will be designed that avoids from obstacles. The vehicle must
What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 0920 | Nuran Doğru | Popcorn machine design | 2021 Fall | Erdem Mutlu, , , | |||
|
Title: Popcorn machine design Overview of the project A popcorn machine will be designed at low cost. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they
wish.
|
|||||||
| 0919 | Nuran Doğru | Prototype robot-vacuum cleaner | 2021 Fall | Fatma Sude Mutluay, Mine Dogru, Ruveyda Kilinc, | |||
|
Title: Prototype robot-vacuum cleaner Overview of the project A prototype robot-vacuum cleaner will be designed. The robot should be able to
What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be donated to the department for display or
lab.
|
|||||||
| 0918 | Arif Nacaroğlu | Target follower | 2021 Spring | Mohamed Moustafa, , , | |||
|
Title: Target follower Overview of the project In this project, a software and hardware of the target follower system will be designed and constructed. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools
|
|||||||
| 0917 | Arif Nacaroğlu | Target follower | 2021 Spring | Furkan Yerli, , , | |||
|
Title: Target follower Overview of the project In this project, a software and hardware of the target follower system will be designed and constructed. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools
|
|||||||
| 0916 | Mete Vural | Luo Converter Design | 2021 Spring | Asaad Arab, , , | |||
|
Title: Luo Converter Design Overview of the project Luo converters are Dc-Dc converters which are used in many applications such as renewable energy systems, electric vehicles, and computer hardware circuits. In this project a LUO converter will be designed. It will be fed from a fixed 5V Dc source and the average output voltage will be 50 V at no load. The maximum allowable output voltage ripple at no load will be 10%. The minimum efficiency will be 80%. The minimum power output will be 20W. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0914 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2021 Spring | Yusuf Kocak, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) Overview of the project Electromagnetic waves (EM waves) are composed of oscillating magnetic and electric fields. EM waves travel with a constant velocity of 3.00 x 108 m/s in vacuum. An electromagnetic wave can travel through anything - be it air, a solid material or vacuum. Electromagnetic waves bring energy into a system by way of their electric and magnetic fields. These fields can exert forces and move charges in the system and, thus, do work on them. However, there is energy in an electromagnetic wave itself, whether it is absorbed or not. Once created, the fields carry energy away from a source. If some of the energy is absorbed by the medium, the field strengths are decreased and anything left travels on. In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0913 | Taner İnce | Weather reporter | 2021 Spring | Mustafa Ince, , , | |||
|
Title: Weather reporter Overview of the project In this project, student will design a system to measure the temperature, humidity and light in the weather. The measured data will be recorded and device will send this data by sms to designated user. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools:
The project will be kept by the students to do with as they wish.
|
|||||||
| 0912 | Taner İnce | Weather reporter | 2021 Spring | Mehmet Guclu, , , | |||
|
Title: Weather reporter Overview of the project In this project, student will design a system to measure the temperature, humidity and light in the weather. The measured data will be recorded and device will send this data by sms to designated user. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools:
The project will be kept by the students to do with as they wish.
|
|||||||
| 0911 | Taner İnce | Patient Status Device | 2021 Spring | Ferhat Gozegir, , , | |||
|
Title: Patient Status Device Overview of the project In this project, student will design a system to follow the patient status remotely. The system will measure the oxygen saturation, hearth beat rate and temperature of patient continously. if the data measured by system is not in the allowable range, then the system will send sms to doctor to inform about the patient's status. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools:
The project will be kept by the students to do with as they wish.
|
|||||||
| 0910 | Taner İnce | Patient Status Device | 2021 Spring | Muhammet Hasan Kocyigit, , , | |||
|
Title: Patient Status Device Overview of the project In this project, student will design a system to follow the patient status remotely. The system will measure the oxygen saturation, hearth beat rate and temperature of patient continously. if the data measured by system is not in the allowable range, then the system will send sms to doctor to inform about the patient's status. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools:
The project will be kept by the students to do with as they wish.
|
|||||||
| 0909 | Nurdal Watsuji | Computer Vision-Based Text Scanner | 2021 Spring | Berna Gamze Eker, , , | |||
|
Title: Computer Vision-Based Text Scanner Overview of the project In this project, you will make your computer "read" and identify texts! You will develop a computer vision based text scanner application that can scan any text from an image using the optical character recognition algorithm and display the text on your screen. You will also learn image processing algorithms like image thresholding, optical character recognition. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they wish.
|
|||||||
| 0908 | Nurdal Watsuji | Computer Vision-Based Text Scanner | 2021 Spring | Mohamad Al Houssin, , , | |||
|
Title: Computer Vision-Based Text Scanner Overview of the project In this project, you will make your computer "read" and identify texts! You will develop a computer vision based text scanner application that can scan any text from an image using the optical character recognition algorithm and display the text on your screen. You will also learn image processing algorithms like image thresholding, optical character recognition. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they wish.
|
|||||||
| 0907 | Nurdal Watsuji | Bird Species Identification using Matlab | 2021 Spring | Hanim Aslan, , , | |||
|
Title: Bird Species Identification using Matlab Overview of the project The species of birds can be identified by using their sounds. The recorded audio is analyzed to obtain the three key features:frequency, pattern and length. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they wish.
|
|||||||
| 0906 | Nurdal Watsuji | Bird Species Identification using Matlab | 2021 Spring | Mohamad Afoura, , , | |||
|
Title: Bird Species Identification using Matlab Overview of the project The species of birds can be identified by using their sounds. The recorded audio is analyzed to obtain the three key features:frequency, pattern and length. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they wish.
|
|||||||
| 0905 | Nurdal Watsuji | Leaf recognition of plants using Matlab | 2021 Spring | Kaan Gok, , , | |||
|
Title: Leaf recognition of plants using Matlab Overview of the project Plant recognition can be performed by human experts manually but it is a time consuming and low-efficiency process. It can be automated using image processing software. In this project, the system will be developed that gives users the ability to identify plants based on photographs of the leaves taken with a camera. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools:
|
|||||||
| 0904 | Nurdal Watsuji | Leaf recognition of plants using Matlab | 2021 Spring | Fatih Gultekin, , , | |||
|
Title: Leaf recognition of plants using Matlab Overview of the project Plant recognition can be performed by human experts manually but it is a time consuming and low-efficiency process. It can be automated using image processing software. In this project, the system will be developed that gives users the ability to identify plants based on photographs of the leaves taken with a camera. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools:
|
|||||||
| 0903 | Arif Nacaroğlu | Hearing aid device | 2021 Spring | Mehmet Gokdogan, , , | |||
|
Title: Hearing aid device Overview of the project In this work the student is expacted to design and construct the device to recieve the envioremental sound with high sensitivity and to amplify it for audio disabled people. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they wish.
|
|||||||
| 0902 | Arif Nacaroğlu | Hearing aid device | 2021 Spring | Musa Sevgi, , , | |||
|
Title: Hearing aid device Overview of the project In this work the student is expacted to design and construct the device to recieve the envioremental sound with high sensitivity and to amplify it for audio disabled people. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they wish.
|
|||||||
| 0901 | Arif Nacaroğlu | Acoustic Amplifier | 2021 Spring | Alihan Uzdil, , , | |||
|
Title: Acoustic Amplifier Overview of the project In this project analog acoustic amplifier will be designed, simulated and constructed.The sound from preamplifier will be first filterd by active audio filter and the output will be amplified to 10 Watts level of power. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools
|
|||||||
| 0900 | Arif Nacaroğlu | Acoustic Amplifier | 2021 Spring | Tasnim Mira Kattan, , , | |||
|
Title: Acoustic Amplifier Overview of the project In this project analog acoustic amplifier will be designed, simulated and constructed.The sound from preamplifier will be first filterd by active audio filter and the output will be amplified to 10 Watts level of power. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools
|
|||||||
| 0899 | Gölge Öğücü | Wideband Patch Antenna for Sub-6 GHz 5G systems | 2021 Spring | Kaan Mehmet Gokdemir, , , | |||
|
Title: Wideband Patch Antenna for Sub-6 GHz 5G systems Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0898 | Gölge Öğücü | Wideband Patch Antenna for Sub-6 GHz 5G systems | 2021 Spring | Zekeriya Edahil, , , | |||
|
Title: Wideband Patch Antenna for Sub-6 GHz 5G systems Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0897 | Taner İnce | Fire and Gas detector | 2021 Spring | Kadir Mutlu, , , | |||
|
Title: Fire and Gas detector Overview of the project In this project student will design a system to avoid a fire in a smart house. When there is gas leakage, the system will shut off the gas supply using a step motor and then blow all gas from the house using a fan. The system will also detect fire using fire sensor and shut off gas supply without spreading the fire. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools:
The project will be kept by the students to do with as they wish.
|
|||||||
| 0896 | Taner İnce | Fire and Gas detector | 2021 Spring | Yemen Hamedi, , , | |||
|
Title: Fire and Gas detector Overview of the project In this project student will design a system to avoid a fire in a smart house. When there is gas leakage, the system will shut off the gas supply using a step motor and then blow all gas from the house using a fan. The system will also detect fire using fire sensor and shut off gas supply without spreading the fire. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Specific components/tools:
The project will be kept by the students to do with as they wish.
|
|||||||
| 0895 | Nuran Doğru | Radio Frequency Remote Controlled Wireless Robot | 2021 Spring | Suleyman Sari, , , | |||
|
Title: Radio Frequency Remote Controlled Wireless Robot Overview of the project Radio frequency controlled robotic vehicle will be designed. The robotic vehicle is interfaced with radio frequency remote control. Working distance will be adjusted by student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0894 | Nuran Doğru | Radio Frequency Remote Controlled Wireless Robot | 2021 Spring | Cihan Nazli, , , | |||
|
Title: Radio Frequency Remote Controlled Wireless Robot Overview of the project Radio frequency controlled robotic vehicle will be designed. The robotic vehicle is interfaced with radio frequency remote control. Working distance will be adjusted by student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0893 | Gölge Öğücü | 4x1 Patch Array at 28 GHz for 5G | 2021 Spring | Melike Gundogdu, , , | |||
|
Title: 4x1 Patch Array at 28 GHz for 5G Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0892 | Gölge Öğücü | 4x1 Patch Array at 28 GHz for 5G | 2021 Spring | Muhammed Mustafa, , , | |||
|
Title: 4x1 Patch Array at 28 GHz for 5G Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0891 | Gölge Öğücü | 2x2 Patch Array at 28 GHz for 5G | 2021 Spring | Hamid Kheir, , , | |||
|
Title: 2x2 Patch Array at 28 GHz for 5G Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0890 | Gölge Öğücü | 2x2 Patch Array at 28 GHz for 5G | 2021 Spring | Kemal Dogan, , , | |||
|
Title: 2x2 Patch Array at 28 GHz for 5G Overview of the project What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0889 | Nuran Doğru | Cell Phone Controlled Robotic Vehicle | 2021 Spring | Batuhan Yigit, , , | |||
|
Title: Cell Phone Controlled Robotic Vehicle Overview of the project A robotic vehicle will be designed to be controlled using DTMF technology. The vehicle can be controlled by a cell phone with this technology. It can be moved in all directions such as forward, backward, left or right etc. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0888 | Nuran Doğru | Cell Phone Controlled Robotic Vehicle | 2021 Spring | Emine Osman, , , | |||
|
Title: Cell Phone Controlled Robotic Vehicle Overview of the project A robotic vehicle will be designed to be controlled using DTMF technology. The vehicle can be controlled by a cell phone with this technology. It can be moved in all directions such as forward, backward, left or right etc. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0887 | Nuran Doğru | TV Remote Controlled Robotic Vehicle Project | 2021 Spring | Kemal Dulda, , , | |||
|
Title: TV Remote Controlled Robotic Vehicle Project Overview of the project A robotic vehicle will be designed to be controlled using TV remote. This vehicle can be moved in all directions such as forward, backward, left or right etc. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0886 | Nuran Doğru | TV Remote Controlled Robotic Vehicle Project | 2021 Spring | Busra Nur Mete, , , | |||
|
Title: TV Remote Controlled Robotic Vehicle Project Overview of the project A robotic vehicle will be designed to be controlled using TV remote. This vehicle can be moved in all directions such as forward, backward, left or right etc. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0885 | Mete Vural | Brushless DC Motor Design | 2021 Spring | Mert Keles, , , | |||
|
Title: Brushless DC Motor Design Overview of the project Brushless direct current motor (BLDC) is an efficient type of motors which is used in many applications such as disk drives, printers, and electric vehicles. These motors have high torque and speed advantage. For instance, BLDC motors are usually preferred for fixed wing unmanned aerial vehicle applications since they consume less power and stay in the air more. In this project, a motor will be designed by one graduation project student. In this project, a BLDC motor will be designed by one graduation student for small fixed wing unmanned aerial vehicle application. The physical and magnetic designs of the motor will be made. The proposed motor should run under room conditions. The other constraints as well as operating conditions will be clarified during the progress of the project. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0883 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2021 Spring | Burak Yilmaz, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) Overview of the project Electromagnetic waves (EM waves) are composed of oscillating magnetic and electric fields. EM waves travel with a constant velocity of 3.00 x 108 m/s in vacuum. An electromagnetic wave can travel through anything - be it air, a solid material or vacuum. Electromagnetic waves bring energy into a system by way of their electric and magnetic fields. These fields can exert forces and move charges in the system and, thus, do work on them. However, there is energy in an electromagnetic wave itself, whether it is absorbed or not. Once created, the fields carry energy away from a source. If some of the energy is absorbed by the medium, the field strengths are decreased and anything left travels on. In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0882 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2021 Spring | Sehed Basmaci, , , | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project RFID stands for Radio-Frequency Identification. The acronym usually refers a whole system, which usually contains three main parts: The RFID tag, RFID Reader, and the Application. RFID tag refers to small electronic devices that consist of a small chip and an antenna. The chip typically is capable of carrying some kind of information depending on applications. The RFID device serves the same purpose as a bar code or a magnetic strip on the back of a credit card or ATM card; it provides a unique identifier for that object. The difference between RFID and them is just that RFID can work without contact. In this project the RFID and applications will be searched and a design and construction project will be sugested by the students. The project will be proposed by the student. The proposal should be original and usable in daily life. The originality of the proposal and its usability in daily life will be taken into account when grading. The proposed and completed project will be considered as copy if the exactly same project is found on the internet at any time before getting your final grade. The similar projects are acceptable with your contribution(s), if you give reference. The proposal of the project must be discussed with the advisor and approved by the advisor before project begins (within a maximum of two weeks). What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0881 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2021 Spring | Oguz Kaan Begmisli, , , | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project RFID stands for Radio-Frequency Identification. The acronym usually refers a whole system, which usually contains three main parts: The RFID tag, RFID Reader, and the Application. RFID tag refers to small electronic devices that consist of a small chip and an antenna. The chip typically is capable of carrying some kind of information depending on applications. The RFID device serves the same purpose as a bar code or a magnetic strip on the back of a credit card or ATM card; it provides a unique identifier for that object. The difference between RFID and them is just that RFID can work without contact. In this project the RFID and applications will be searched and a design and construction project will be sugested by the students. The project will be proposed by the student. The proposal should be original and usable in daily life. The originality of the proposal and its usability in daily life will be taken into account when grading. The proposed and completed project will be considered as copy if the exactly same project is found on the internet at any time before getting your final grade. The similar projects are acceptable with your contribution(s), if you give reference. The proposal of the project must be discussed with the advisor and approved by the advisor before project begins (within a maximum of two weeks). What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0880 | Seydi Kaçmaz | Self Balancing Robot | 2021 Spring | Ali Alper Korkmaz, , , | |||
|
Title: Self Balancing Robot Overview of the project Self-balancing robot is a two-wheeled robot which balances itself so that it prevents itself from falling. This concept is somewhat similar to the operation of a unicycle, the rider of the unicycle balances by moving himself in the same direction of the inclination so that he stays vertical, similarly the self-balancing robot balances by moving in the same direction of the inclination. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0879 | Seydi Kaçmaz | Self Balancing Robot | 2021 Spring | Cagri Inan, , , | |||
|
Title: Self Balancing Robot Overview of the project Self-balancing robot is a two-wheeled robot which balances itself so that it prevents itself from falling. This concept is somewhat similar to the operation of a unicycle, the rider of the unicycle balances by moving himself in the same direction of the inclination so that he stays vertical, similarly the self-balancing robot balances by moving in the same direction of the inclination. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0878 | Seydi Kaçmaz | Gesture based Robotic Arm | 2021 Spring | Mustafa Taha Tuna, , , | |||
|
Title: Gesture based Robotic Arm Overview of the project Robotic arms are used in various fields like industries, medical and many more. In industries the robots are used in the manufacturing process, packaging, in the production line. These robotic arms are used in the place where human intervention is impossible. In the medical field the robotic arms are used in operating the patients in a surgery. The robotic arms can be controlled by many means, in gesture based control of a robotic arm, the user can control it precisely by his hand gestures. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0877 | Seydi Kaçmaz | Gesture based Robotic Arm | 2021 Spring | Sevval Nur Erol, , , | |||
|
Title: Gesture based Robotic Arm Overview of the project Robotic arms are used in various fields like industries, medical and many more. In industries the robots are used in the manufacturing process, packaging, in the production line. These robotic arms are used in the place where human intervention is impossible. In the medical field the robotic arms are used in operating the patients in a surgery. The robotic arms can be controlled by many means, in gesture based control of a robotic arm, the user can control it precisely by his hand gestures. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0876 | Seydi Kaçmaz | Rubik's Cube Solver Robot | 2021 Spring | Derya Karahan, , , | |||
|
Title: Rubik's Cube Solver Robot Overview of the project Rubik's cube is a puzzle which everybody cannot solve easily, a person needs to calculate and then twist the cube to match the colors of each side. If a person is solving a Rubik's cube, then he checks the pattern of all the sides in the cube and calculates what should be the movement of the cube to match the colors of each side. This Rubik's cube solver robot does the same. The Rubik's cube when shuffled has many possible patterns, the robot should be able to take any pattern as input and solve the cube. The robot should be able to hold the cube in a position and twist it to change the pattern and also turn the cube's side. The pattern of the cube will be input for the robot. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0875 | Seydi Kaçmaz | Rubik's Cube Solver Robot | 2021 Spring | Mehmet Fatih Fedai, , , | |||
|
Title: Rubik's Cube Solver Robot Overview of the project Rubik's cube is a puzzle which everybody cannot solve easily, a person needs to calculate and then twist the cube to match the colors of each side. If a person is solving a Rubik's cube, then he checks the pattern of all the sides in the cube and calculates what should be the movement of the cube to match the colors of each side. This Rubik's cube solver robot does the same. The Rubik's cube when shuffled has many possible patterns, the robot should be able to take any pattern as input and solve the cube. The robot should be able to hold the cube in a position and twist it to change the pattern and also turn the cube's side. The pattern of the cube will be input for the robot. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0874 | Mete Vural | Luo Converter Design | 2021 Spring | Fatma Guven, , , | |||
|
Title: Luo Converter Design Overview of the project Luo converters are Dc-Dc converters which are used in many applications such as renewable energy systems, electric vehicles, and computer hardware circuits. In this project a LUO converter will be designed. It will be fed from a fixed 5V Dc source and the average output voltage will be 50 V at no load. The maximum allowable output voltage ripple at no load will be 10%. The minimum efficiency will be 80%. The minimum power output will be 20W. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0873 | Mete Vural | Luo Converter Design | 2021 Spring | Zeliha Ayhan, , , | |||
|
Title: Luo Converter Design Overview of the project Luo converters are Dc-Dc converters which are used in many applications such as renewable energy systems, electric vehicles, and computer hardware circuits. In this project a LUO converter will be designed. It will be fed from a fixed 5V Dc source and the average output voltage will be 50 V at no load. The maximum allowable output voltage ripple at no load will be 10%. The minimum efficiency will be 80%. The minimum power output will be 20W. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0872 | Mete Vural | Wireless Power Transfer | 2021 Spring | Huseyin Soyaltin, , , | |||
|
Title: Wireless Power Transfer Overview of the project The concept of wireless power transfer is very attractive nowadays. These systems are extensively used in electric vehicles and mobile electronic devices for charging. In this project, a wireless power transfer system will be designed by one graduation student. The system can be based on energy transfer via magnetic or electric field. The system must operate under room conditions and the output voltage must be 5 volts DC. The output power must be minimum 10 W. The system should be able to supply this power to the load when the distance between sender and receiver is 1 cm. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0871 | Mete Vural | Wireless Power Transfer | 2021 Spring | Mustafa Yildiz, , , | |||
|
Title: Wireless Power Transfer Overview of the project The concept of wireless power transfer is very attractive nowadays. These systems are extensively used in electric vehicles and mobile electronic devices for charging. In this project, a wireless power transfer system will be designed by one graduation student. The system can be based on energy transfer via magnetic or electric field. The system must operate under room conditions and the output voltage must be 5 volts DC. The output power must be minimum 10 W. The system should be able to supply this power to the load when the distance between sender and receiver is 1 cm. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0870 | Mahmut Aykaç | Spy Bug | 2021 Spring | Miray Coskun, , , | |||
|
Title: Spy Bug Overview of the project Student is expected to design and realize a spy bug. This bug must receive the speech through a microphone and transmit the speech data to a far point (PC, beagle bone, rasperry pi etc.). Finally, speech data must be saved to replay. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0869 | Mahmut Aykaç | Spy Bug | 2021 Spring | Halil Ibrahim Dogan, , , | |||
|
Title: Spy Bug Overview of the project Student is expected to design and realize a spy bug. This bug must receive the speech through a microphone and transmit the speech data to a far point (PC, beagle bone, rasperry pi etc.). Finally, speech data must be saved to replay. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0868 | Sema Kayhan | Microcontrollers Based Product Remaining Shelf Life Estimation | 2021 Spring | Selcuk Ozgul, , , | |||
|
Title: Microcontrollers Based Product Remaining Shelf Life Estimation Overview of the project The main objective of this project is to analyze the remaining shelf life of fruits and vegetables with the help of microcontrollers/Ardunio using data analysis method. This system detects the carbon dioxide amount of fruit or vegetables in the airless container with the help of sensors and the result is transmitted to the microcontrollers and the remaining shelf life analysis of the food in it is provided. Student can optionally monitor the result on the computer or on the phone. What is the design in this project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0867 | Sema Kayhan | Microcontrollers Based Product Remaining Shelf Life Estimation | 2021 Spring | Mehmet Batuhan Polat, , , | |||
|
Title: Microcontrollers Based Product Remaining Shelf Life Estimation Overview of the project The main objective of this project is to analyze the remaining shelf life of fruits and vegetables with the help of microcontrollers/Ardunio using data analysis method. This system detects the carbon dioxide amount of fruit or vegetables in the airless container with the help of sensors and the result is transmitted to the microcontrollers and the remaining shelf life analysis of the food in it is provided. Student can optionally monitor the result on the computer or on the phone. What is the design in this project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0866 | Sema Kayhan | Portable ECG Monitoring System | 2021 Spring | Arda Ege Toslak, , , | |||
|
Title: Portable ECG Monitoring System Overview of the project In this project, a portable Electrocardiography monitoring system will be designed. The small size of the monitoring system to be designed will not disturb the patient in terms of comfort and will provide instant access to their own data. Arduino based controller will be used for the measurement and processing of medical system data. Portable monitoring system processes the data physically measured from the human body with the help of a microcontroller/Ardunio and communicates with the mobile device wirelessly via Bluetooth and enables it to be monitored over the user interface. Medicall signals to be followed for human health quality are Electrocardiography (EKG), Blood Oxygen Saturation Level and pulse. What is the design in this project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0865 | Sema Kayhan | Portable ECG Monitoring System | 2021 Spring | Muhammet Cuma, , , | |||
|
Title: Portable ECG Monitoring System Overview of the project In this project, a portable Electrocardiography monitoring system will be designed. The small size of the monitoring system to be designed will not disturb the patient in terms of comfort and will provide instant access to their own data. Arduino based controller will be used for the measurement and processing of medical system data. Portable monitoring system processes the data physically measured from the human body with the help of a microcontroller/Ardunio and communicates with the mobile device wirelessly via Bluetooth and enables it to be monitored over the user interface. Medicall signals to be followed for human health quality are Electrocardiography (EKG), Blood Oxygen Saturation Level and pulse. What is the design in this project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0864 | Sema Kayhan | Intelligent fire detection system | 2021 Spring | Mehmet Korkmaz, , , | |||
|
Title: Intelligent fire detection system Overview of the project The project aims to detect fire by combining the data generated by detecting various gases, smoke and temperature in a system with appropriate sensors, with artificial neural networks (ANN). Metal oxide gas sensors can be used to detect gases, infrared transmitter/receiver pair for smoke, and LM35 temperature sensor for temperature. Data set will be created by using these sensors data. And will be processed with ANN model in MATLAB compiler. Then the alarm will be activated acording to result of detection system. What is the design in this project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0863 | Sema Kayhan | Intelligent fire detection system | 2021 Spring | Tamer Kose, , , | |||
|
Title: Intelligent fire detection system Overview of the project The project aims to detect fire by combining the data generated by detecting various gases, smoke and temperature in a system with appropriate sensors, with artificial neural networks (ANN). Metal oxide gas sensors can be used to detect gases, infrared transmitter/receiver pair for smoke, and LM35 temperature sensor for temperature. Data set will be created by using these sensors data. And will be processed with ANN model in MATLAB compiler. Then the alarm will be activated acording to result of detection system. What is the design in this project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0862 | Serkan Özbay | Smart Alarm Clock using Hypnagogia Detection | 2021 Spring | Hasan Soykan, , , | |||
|
Title: Smart Alarm Clock using Hypnagogia Detection Overview of the project The purpose of this project is to design a system that will detect all body movements by motion sensor to evaluate the best possible moment to wake up the user and then adjust the alarm time to the best possible moment. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0861 | Serkan Özbay | Smart Alarm Clock using Hypnagogia Detection | 2021 Spring | Ibrahim Aydemir, , , | |||
|
Title: Smart Alarm Clock using Hypnagogia Detection Overview of the project The purpose of this project is to design a system that will detect all body movements by motion sensor to evaluate the best possible moment to wake up the user and then adjust the alarm time to the best possible moment. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0860 | Serkan Özbay | Automated Parking Lot Attendant System | 2021 Spring | Onur Aksu, , , | |||
|
Title: Automated Parking Lot Attendant System Overview of the project In this project, the purpose is to design an automated parking lot attendant system. The system will detect both the entering and leaving cars on the parking lot and count how many cars are in there. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0859 | Serkan Özbay | Automated Parking Lot Attendant System | 2021 Spring | Okan Tastepe, , , | |||
|
Title: Automated Parking Lot Attendant System Overview of the project In this project, the purpose is to design an automated parking lot attendant system. The system will detect both the entering and leaving cars on the parking lot and count how many cars are in there. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0858 | Serkan Özbay | Automatic Garage Door System | 2021 Spring | Suleyman Tunc, , , | |||
|
Title: Automatic Garage Door System Overview of the project In this project, a garage door system which enables the car garage door to be opened and closed automatically according to the identified car will be designed. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0857 | Serkan Özbay | Automatic Garage Door System | 2021 Spring | Fatih Kabalcioglu, , , | |||
|
Title: Automatic Garage Door System Overview of the project In this project, a garage door system which enables the car garage door to be opened and closed automatically according to the identified car will be designed. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The project will be kept by the students to do with as they wish.
|
|||||||
| 0856 | Uğur Cem Hasar | Design a metamaterial sensor using CST-5 | 2021 Spring | Melis Ozeren, , , | |||
|
Title: Design a metamaterial sensor using CST-5 Overview of the project The project goal is to design a metamaterial sensor using a 3D electromagnetic simulation program CST Microwave Studio. The student will design his/her sensor using a given article as the reference. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0855 | Uğur Cem Hasar | Design a metamaterial sensor using CST-5 | 2021 Spring | Khosraw Jan Haibat, , , | |||
|
Title: Design a metamaterial sensor using CST-5 Overview of the project The project goal is to design a metamaterial sensor using a 3D electromagnetic simulation program CST Microwave Studio. The student will design his/her sensor using a given article as the reference. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0854 | Uğur Cem Hasar | Design a metamaterial sensor using CST-4 | 2021 Spring | Servet Kocak, , , | |||
|
Title: Design a metamaterial sensor using CST-4 Overview of the project The project goal is to design a metamaterial sensor using a 3D electromagnetic simulation program CST Microwave Studio. The student will design his/her sensor using a given article as the reference. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0853 | Uğur Cem Hasar | Design a metamaterial sensor using CST-4 | 2021 Spring | Asif Alkaya, , , | |||
|
Title: Design a metamaterial sensor using CST-4 Overview of the project The project goal is to design a metamaterial sensor using a 3D electromagnetic simulation program CST Microwave Studio. The student will design his/her sensor using a given article as the reference. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0852 | Uğur Cem Hasar | Design a metamaterial sensor using CST-3 | 2021 Spring | Veli Bulut Cakmak, , , | |||
|
Title: Design a metamaterial sensor using CST-3 Overview of the project The project goal is to design a metamaterial sensor using a 3D electromagnetic simulation program CST Microwave Studio. The student will design his/her sensor using a given article as the reference. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0851 | Uğur Cem Hasar | Design a metamaterial sensor using CST-3 | 2021 Spring | Nuri Kurtoglu, , , | |||
|
Title: Design a metamaterial sensor using CST-3 Overview of the project The project goal is to design a metamaterial sensor using a 3D electromagnetic simulation program CST Microwave Studio. The student will design his/her sensor using a given article as the reference. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
Division of tasks
Specific components/tools
The completed project will be kept by the supervisor for further use.
|
|||||||
| 0850 | Tolgay Kara | PID tuning for a liquid level process control problem | 2021 Spring | Salaheddin Banshi, , , | |||
|
Title: PID tuning for a liquid level process control problem Overview of the project Ziegler-Nichols tuning methods will be used to design a proper PID controller for a liquid level process. The process consists of a single-tank liquid level system with a uniform cylindrical tank. Control design will be tested via computer simulations and experiments. What is the design in this project?
What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 0849 | Tolgay Kara | PID tuning for a liquid level process control problem | 2021 Spring | Muhammet Nevfel Ak, , , | |||
|
Title: PID tuning for a liquid level process control problem Overview of the project Ziegler-Nichols tuning methods will be used to design a proper PID controller for a liquid level process. The process consists of a single-tank liquid level system with a uniform cylindrical tank. Control design will be tested via computer simulations and experiments. What is the design in this project?
What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 0848 | Tolgay Kara | Sensor-free solar tracker | 2021 Spring | Osman Guvercin, , , | |||
|
Title: Sensor-free solar tracker Overview of the project A sun tracking mechanism for solar panels will be designed. The mechanism will be sensor-free. Motion control for accurate sun tracking is required. Power generation performance should be compared with a standard stationary panel. What is the design in this project? Two design goals of the project are: What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 0847 | Tolgay Kara | Sensor-free solar tracker | 2021 Spring | Efe Guzelseme, , , | |||
|
Title: Sensor-free solar tracker Overview of the project A sun tracking mechanism for solar panels will be designed. The mechanism will be sensor-free. Motion control for accurate sun tracking is required. Power generation performance should be compared with a standard stationary panel. What is the design in this project? Two design goals of the project are: What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 0846 | Musa Bute | Teknofest- International Unmanned Aerial Vehicle Competition | 2021 Spring | Fatih Dagilmis, , , | |||
|
Title: Teknofest- International Unmanned Aerial Vehicle Competition Overview of the project The competition has two categories which are "fixed wing" and "rotary wing". There are three phases in the competition. Teams are asked to complete tasks such as completing the track, recognizing useful load, and carrying and dropping at each stage. It is expected that they perform the assigned tasks autonomously in the advanced stages. Teams are expected to accomplish two different flight missions in the competition. In the first mission, the maneuverability of the teams' aircrafts are tested. In the second mission, teams are asked to drop load of certain weight to a predetermined area. The following awards are presented to the teams ranking the highest in the competition. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0845 | Musa Bute | Teknofest- International Unmanned Aerial Vehicle Competition | 2021 Spring | Muhammed Alaca, , , | |||
|
Title: Teknofest- International Unmanned Aerial Vehicle Competition Overview of the project The competition has two categories which are "fixed wing" and "rotary wing". There are three phases in the competition. Teams are asked to complete tasks such as completing the track, recognizing useful load, and carrying and dropping at each stage. It is expected that they perform the assigned tasks autonomously in the advanced stages. Teams are expected to accomplish two different flight missions in the competition. In the first mission, the maneuverability of the teams' aircrafts are tested. In the second mission, teams are asked to drop load of certain weight to a predetermined area. The following awards are presented to the teams ranking the highest in the competition. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0841 | Musa Bute | Teknofest - Swarm Unmanned Aerial Vehicles (Swarm UAV) | 2021 Spring | Mustafa Cabuk, , , | |||
|
Title: Teknofest - Swarm Unmanned Aerial Vehicles (Swarm UAV) Overview of the project The primary objectives of Swarm UAV Competition include developing software algorithms to organize UAV swarms that can perform the tasks assigned as per terms and conditions of the competition, and demonstrating the performance results of these algorithms with Swarm UAVs in a physical environment, as well as providing guidance to youth and helping them gain experience and knowledge. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0840 | Tolgay Kara | Electronic walking stick for visually impaired people | 2021 Spring | Burak Inan, , , | |||
|
Title: Electronic walking stick for visually impaired people Overview of the project A walking stick with proper sensors and electronics will be designed. The user should be warned about obstacles. The stick should be user friendly, lightweight and efficient. What is the design in this project?
What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 0839 | Tolgay Kara | Electronic walking stick for visually impaired people | 2021 Spring | Hanifi Velet, , , | |||
|
Title: Electronic walking stick for visually impaired people Overview of the project A walking stick with proper sensors and electronics will be designed. The user should be warned about obstacles. The stick should be user friendly, lightweight and efficient. What is the design in this project?
What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as
they wish.
|
|||||||
| 0838 | Ergun Erçelebi | Design an Infrared Thermometer Using msp430 Microcontroller | 2021 Spring | Osman Kutluay Deveci, , , | |||
|
Title: Design an Infrared Thermometer Using msp430 Microcontroller Overview of the project Monitoring our body temperature is essential for us to stay healthy. An infrared thermometer can measure temperature without contact, which can help ease the spread of a contact infection. In this project student will design an infrared thermometer using msp430 microcontroller. The device will be composed of microcontroller, display panel, sensor, and other electronic components. Other information in the project will be given during the interviews with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0837 | Ergun Erçelebi | Design an Infrared Thermometer Using msp430 Microcontroller | 2021 Spring | Ali Bozkurt, , , | |||
|
Title: Design an Infrared Thermometer Using msp430 Microcontroller Overview of the project Monitoring our body temperature is essential for us to stay healthy. An infrared thermometer can measure temperature without contact, which can help ease the spread of a contact infection. In this project student will design an infrared thermometer using msp430 microcontroller. The device will be composed of microcontroller, display panel, sensor, and other electronic components. Other information in the project will be given during the interviews with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0836 | Ergun Erçelebi | Development of blood pressure measuring device using | 2021 Spring | Umut Kelleci, , , | |||
|
Title: Development of blood pressure measuring device using Overview of the project In the project, studies will be made to develop a device that will measure blood pressure or blood pressure. The device will be developed using msp430 microcontroller. Also such as LCD, cuff, and other electronic components will be used in the project. Other information in the project will be given during the interviews with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0835 | Ergun Erçelebi | Development of blood pressure measuring device using | 2021 Spring | Metehan Bayar, , , | |||
|
Title: Development of blood pressure measuring device using Overview of the project In the project, studies will be made to develop a device that will measure blood pressure or blood pressure. The device will be developed using msp430 microcontroller. Also such as LCD, cuff, and other electronic components will be used in the project. Other information in the project will be given during the interviews with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0834 | Ergun Erçelebi | DEVELOPMENT OF PULSE OXIMETER USING MSP430 MICROCONTROLLER | 2021 Spring | Utku Can Aktas, , , | |||
|
Title: DEVELOPMENT OF PULSE OXIMETER USING MSP430 MICROCONTROLLER Overview of the project A pulse oximeter is a medical electronic device used to detect oxygen saturation in blood by transmission of light through a tissue. Preferably this information should be received periodically. These needs can be met via the non−invasive method of pulse oximetry. This is currently used in hospitals and other clinical settings. The student will develop this device using msp430 processor in the project. The device consists of microcontroller, LCD screen, sensor and other electronic components. Other information in the project will be given during the interviews with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0833 | Ergun Erçelebi | DEVELOPMENT OF PULSE OXIMETER USING MSP430 MICROCONTROLLER | 2021 Spring | Eyup Alinak, , , | |||
|
Title: DEVELOPMENT OF PULSE OXIMETER USING MSP430 MICROCONTROLLER Overview of the project A pulse oximeter is a medical electronic device used to detect oxygen saturation in blood by transmission of light through a tissue. Preferably this information should be received periodically. These needs can be met via the non−invasive method of pulse oximetry. This is currently used in hospitals and other clinical settings. The student will develop this device using msp430 processor in the project. The device consists of microcontroller, LCD screen, sensor and other electronic components. Other information in the project will be given during the interviews with the student. What is the design in this project? What realistic constraints is the project outcome expected to satisfy?
Under which realistic circumstances is the designed product/system
supposed to operate?
What are the specific criteria for the success of the project?
The completed project will be kept by the students to do with as they
wish.
|
|||||||
| 0832 | Mahmut Aykaç | Analog Scaled Smart Home | 2021 Spring | Serkan Can Demirci, , , | |||
|
Title: Analog Scaled Smart Home Overview of the project In this project, the student is expected to monitor the air quality, room temperature, humidity etc. remotely on a TFT screen with analog scales. Realized system must also alert the user in case of danger. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0831 | Mahmut Aykaç | Analog Scaled Smart Home | 2021 Spring | Umut Basaran, , , | |||
|
Title: Analog Scaled Smart Home Overview of the project In this project, the student is expected to monitor the air quality, room temperature, humidity etc. remotely on a TFT screen with analog scales. Realized system must also alert the user in case of danger. What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0830 | Mahmut Aykaç | Soft Remote Controller | 2021 Spring | Burak Kavci, , , | |||
|
Title: Soft Remote Controller Overview of the project The student is expected to design and development a system that converts the bluetooth signals transmitted by a smart phone and converts it to IR signals to control an electronic device such as TV with its full functions What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0829 | Mahmut Aykaç | Soft Remote Controller | 2021 Spring | Yigit Kargin, , , | |||
|
Title: Soft Remote Controller Overview of the project The student is expected to design and development a system that converts the bluetooth signals transmitted by a smart phone and converts it to IR signals to control an electronic device such as TV with its full functions What is the design in this project? What realistic constraints is the project outcome expected to satisfy? Under which realistic circumstances is the designed product/system supposed to operate? What are the specific criteria for the success of the project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0828 | Seydi Kaçmaz | Face Recognition with a Mask | 2020 Fall | Hidayet Temel, , , | |||
|
Title: Face Recognition with a Mask Overview of the project Today's facial recognition software studies the features around the eye, nose, mouth, and ears to identify an individual whose picture is already supplied, either by the individual or in a criminal database. However, wearing a mask obstructs this recognition. Since the use of masks has increased with Covid 19 disease, conventional Face ID systems cannot recognize people with a mask. In this project, it is aimed to make software that recognizes a person wearing a face mask. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0827 | Ergun Erçelebi | Development of 5V DC To 48V DC Converter | 2020 Fall | Fawjullah Mahmoodi, , , | |||
|
Title: Development of 5V DC To 48V DC Converter Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0826 | Taner İnce | Ultrasonic Radar Project | 2020 Fall | Enes Alp, , , | |||
|
Title: Ultrasonic Radar Project Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0825 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2020 Fall | Mustafa Cabuk, , , | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0824 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2020 Fall | Mert Gokburi, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) Overview of the project In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0823 | Sema Kayhan | A Real Time Object Tracking System | 2020 Fall | Ahmet Uzun, , , | |||
|
Title: A Real Time Object Tracking System Overview of the project What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0822 | Sema Kayhan | A Real Time Object Tracking System | 2020 Fall | Onur Kaynak, , , | |||
|
Title: A Real Time Object Tracking System Overview of the project What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0821 | Taner İnce | Health Monitoring System | 2020 Fall | Huseyin Burak Soylemez, , , | |||
|
Title: Health Monitoring System Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0820 | Taner İnce | Health Monitoring System | 2020 Fall | Muhammed Hamza Akman, , , | |||
|
Title: Health Monitoring System Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0819 | Serkan Özbay | Counting Moving Objects Using Microcontroller | 2020 Fall | Muhammet Cuma, , , | |||
|
Title: Counting Moving Objects Using Microcontroller Overview of the project What is the design in this project? Specific components/tools: The project will be kept by the students to do with as they wish. |
|||||||
| 0818 | Serkan Özbay | Counting Moving Objects Using Microcontroller | 2020 Fall | Rumeysa Kucuktasdemir, , , | |||
|
Title: Counting Moving Objects Using Microcontroller Overview of the project What is the design in this project? Specific components/tools: The project will be kept by the students to do with as they wish. |
|||||||
| 0817 | Serkan Özbay | Indoor Air Quality Monitoring and Controller Design | 2020 Fall | Ihsan Narin, , , | |||
|
Title: Indoor Air Quality Monitoring and Controller Design Overview of the project In this project, you will design an indoor environment quality monitoring and controlling system based on a microcontroller. It will do a real-time monitoring work for detecting the indoor environmental factors and comprehensively evaluate its air quality level. While the indoor air quality status is "poor", this intelligent system will automatically start the ventilator for indoor environmental quality improvement.
What is the design in this project? Specific components/tools: The project will be kept by the students to do with as they wish. |
|||||||
| 0816 | Serkan Özbay | Indoor Air Quality Monitoring and Controller Design | 2020 Fall | Melis Karabulut, , , | |||
|
Title: Indoor Air Quality Monitoring and Controller Design Overview of the project In this project, you will design an indoor environment quality monitoring and controlling system based on a microcontroller. It will do a real-time monitoring work for detecting the indoor environmental factors and comprehensively evaluate its air quality level. While the indoor air quality status is "poor", this intelligent system will automatically start the ventilator for indoor environmental quality improvement.
What is the design in this project? Specific components/tools: The project will be kept by the students to do with as they wish. |
|||||||
| 0815 | Serkan Özbay | Noise Cancellation System | 2020 Fall | Mehmet Turhanoglu, , , | |||
|
Title: Noise Cancellation System Overview of the project In this project, you will design active noise (acoustic) cancellation system that will make noise reduction. The purpose is to combine a loud speaker, microphone and a microcontroller to create a system which can be situated next to a constant sound source to provide active noise reduction. The intended application may be reducing the noise created by an office server or a portable air-conditioning unit. What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0814 | Serkan Özbay | Noise Cancellation System | 2020 Fall | Yonca Agcabay, , , | |||
|
Title: Noise Cancellation System Overview of the project In this project, you will design active noise (acoustic) cancellation system that will make noise reduction. The purpose is to combine a loud speaker, microphone and a microcontroller to create a system which can be situated next to a constant sound source to provide active noise reduction. The intended application may be reducing the noise created by an office server or a portable air-conditioning unit. What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0813 | Serkan Özbay | Smart Coffee Machine Pump | 2020 Fall | Nihat Tutar, , , | |||
|
Title: Smart Coffee Machine Pump Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0812 | Serkan Özbay | Smart Coffee Machine Pump | 2020 Fall | Huseyin Can Metin, , , | |||
|
Title: Smart Coffee Machine Pump Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0811 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2020 Fall | Mustafa Caner Akinci, , , | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0810 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2020 Fall | Merve Nur Gunduz , , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) Overview of the project In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0809 | Tolgay Kara | Motorized model airplane with autonomous flight capability | 2020 Fall | Tugba Kara, , , | |||
|
Title: Motorized model airplane with autonomous flight capability Overview of the project The main goal of the project is to design and construct a motorized model airplane that can fly autonomously. The airplane is supposed to avoid obstacles during flight. Shape, size and material of the airplane is left to the student as a design problem, as well as the electronics, power and control facilities required to fulfill the autonomous flight mission. It is not allowed to use a model airplane that is already designed and constructed. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0808 | Ergun Erçelebi | Detection of objects on the Image using deep learning algorithms | 2020 Fall | Dogan Ozmen, , , | |||
|
Title: Detection of objects on the Image using deep learning algorithms Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0807 | Ergun Erçelebi | Detection of objects on the Image using deep learning algorithms | 2020 Fall | Ahmet Ozdemir, , , | |||
|
Title: Detection of objects on the Image using deep learning algorithms Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0806 | Ergun Erçelebi | Portable ECG device design to monitor heart rate | 2020 Fall | Emre Efendioglu, , , | |||
|
Title: Portable ECG device design to monitor heart rate Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0805 | Ergun Erçelebi | Portable ECG device design to monitor heart rate | 2020 Fall | Muhammed Efe, , , | |||
|
Title: Portable ECG device design to monitor heart rate Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0804 | Ergun Erçelebi | Realization of face recognition system on mini computer using deep learning algorithms | 2020 Fall | Tugay Semih Demirkiran, , , | |||
|
Title: Realization of face recognition system on mini computer using deep learning algorithms Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0803 | Ergun Erçelebi | Realization of face recognition system on mini computer using deep learning algorithms | 2020 Fall | Burak Kalay, , , | |||
|
Title: Realization of face recognition system on mini computer using deep learning algorithms Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0802 | Ergun Erçelebi | Development of 5V DC To 48V DC Converter | 2020 Fall | Mehmet Kinaci, , , | |||
|
Title: Development of 5V DC To 48V DC Converter Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0801 | Ergun Erçelebi | Development of 5V DC To 48V DC Converter | 2020 Fall | Huseyin Gunes, , , | |||
|
Title: Development of 5V DC To 48V DC Converter Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0800 | Uğur Cem Hasar | Design a metamaterial sensor using CST-2 | 2020 Fall | Atakan Bal, , , | |||
|
Title: Design a metamaterial sensor using CST-2 Overview of the project Project goal is to design a metamaterial absorber using a 3D electromagnetic simulation program CST Microwave Studio. Student will design his/her absorber using a given article as the reference. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0799 | Uğur Cem Hasar | Design a metamaterial sensor using CST-2 | 2020 Fall | Muhammet Hasan Kocyigit, , , | |||
|
Title: Design a metamaterial sensor using CST-2 Overview of the project Project goal is to design a metamaterial absorber using a 3D electromagnetic simulation program CST Microwave Studio. Student will design his/her absorber using a given article as the reference. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0798 | Uğur Cem Hasar | Design a metamaterial sensor using CST-1 | 2020 Fall | Emrah Yapici, , , | |||
|
Title: Design a metamaterial sensor using CST-1 Overview of the project Project goal is to design a metamaterial absorber using a 3D electromagnetic simulation program CST Microwave Studio. Student will design his/her absorber using a given article as the reference. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0797 | Uğur Cem Hasar | Design a metamaterial sensor using CST-1 | 2020 Fall | Mehmet Kilinc, , , | |||
|
Title: Design a metamaterial sensor using CST-1 Overview of the project Project goal is to design a metamaterial absorber using a 3D electromagnetic simulation program CST Microwave Studio. Student will design his/her absorber using a given article as the reference. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0796 | Uğur Cem Hasar | Design a metamaterial absorber using CST-2 | 2020 Fall | Mehmet Bazi, , , | |||
|
Title: Design a metamaterial absorber using CST-2 Overview of the project Project goal is to design a metamaterial absorber using a 3D electromagnetic simulation program CST Microwave Studio. Student will design his/her absorber using a given article as the reference. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0795 | Uğur Cem Hasar | Design a metamaterial absorber using CST-2 | 2020 Fall | Ali Oruc, , , | |||
|
Title: Design a metamaterial absorber using CST-2 Overview of the project Project goal is to design a metamaterial absorber using a 3D electromagnetic simulation program CST Microwave Studio. Student will design his/her absorber using a given article as the reference. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0794 | Uğur Cem Hasar | Design a metamaterial absorber using CST-1 | 2020 Fall | Muhammet Furkan Boncuk, , , | |||
|
Title: Design a metamaterial absorber using CST-1 Overview of the project Project goal is to design a metamaterial absorber using a 3D electromagnetic simulation program CST Microwave Studio. Student will design his/her absorber using a given article as the reference. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0793 | Uğur Cem Hasar | Design a metamaterial absorber using CST-1 | 2020 Fall | Sirac Karaman, , , | |||
|
Title: Design a metamaterial absorber using CST-1 Overview of the project Project goal is to design a metamaterial absorber using a 3D electromagnetic simulation program CST Microwave Studio. Student will design his/her absorber using a given article as the reference. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0792 | Musa Bute | Coin Counter for the project mentioned in 0785. | 2020 Fall | Sami Guzelkokar, , , | |||
|
Title: Coin Counter for the project mentioned in 0785. Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0791 | Musa Bute | Coin Counter for the project mentioned in 0785. | 2020 Fall | Onur Eyinacar, , , | |||
|
Title: Coin Counter for the project mentioned in 0785. Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0790 | Musa Bute | Developing an application for Android or IoS devices for the project mentioned in 0785 for customers. | 2020 Fall | Nedim Sahin, , , | |||
|
Title: Developing an application for Android or IoS devices for the project mentioned in 0785 for customers. Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0789 | Musa Bute | Developing an application for Android or IoS devices for the project mentioned in 0785 for customers. | 2020 Fall | Abdullah Ak, , , | |||
|
Title: Developing an application for Android or IoS devices for the project mentioned in 0785 for customers. Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0788 | Musa Bute | Development on Android or IoS programme for the project mentioned in 0785 | 2020 Fall | Gorkem Cetin, , , | |||
|
Title: Development on Android or IoS programme for the project mentioned in 0785 Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0787 | Musa Bute | Development on Android or IoS programme for the project mentioned in 0785 | 2020 Fall | Yunus Sevimli, , , | |||
|
Title: Development on Android or IoS programme for the project mentioned in 0785 Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0786 | Musa Bute | Smart Storage Box | 2020 Fall | Asena Naciye Cat, , , | |||
|
Title: Smart Storage Box Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0785 | Musa Bute | Smart Storage Box | 2020 Fall | Ekrem Atakan Kuloglu, , , | |||
|
Title: Smart Storage Box Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0784 | Tolgay Kara | Hands off the shopping cart | 2020 Fall | Zozan Aslan, , , | |||
|
Title: Hands off the shopping cart Overview of the project The main goal of the project is to design and construct a device that will make it possible to use a shopping cart properly in a supermarket without any direct contact with it. Selection of sensors, controllers, actuators, circuit components and all necessary equipment, and design of the system as a whole is left to the student. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0783 | Tolgay Kara | Hands off the shopping cart | 2020 Fall | Bunyamin Tut, , , | |||
|
Title: Hands off the shopping cart Overview of the project The main goal of the project is to design and construct a device that will make it possible to use a shopping cart properly in a supermarket without any direct contact with it. Selection of sensors, controllers, actuators, circuit components and all necessary equipment, and design of the system as a whole is left to the student. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0782 | Tolgay Kara | Autonomous mobile robot with self-protective behavior | 2020 Fall | Halil Ibrahim Celik, , , | |||
|
Title: Autonomous mobile robot with self-protective behavior Overview of the project The main goal of the project is to design and construct a small autonomous mobile robot that has at least one self-protective action. This action can be avoiding hazardous gases, avoiding fire, avoiding water floods, moving towards fresh air, moving towards light, etc. Selection of the action and maintaining self-protective behavior is left to the student as a design problem. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0781 | Tolgay Kara | Autonomous mobile robot with self-protective behavior | 2020 Fall | Abdullah Furkan Yilmaz, , , | |||
|
Title: Autonomous mobile robot with self-protective behavior Overview of the project The main goal of the project is to design and construct a small autonomous mobile robot that has at least one self-protective action. This action can be avoiding hazardous gases, avoiding fire, avoiding water floods, moving towards fresh air, moving towards light, etc. Selection of the action and maintaining self-protective behavior is left to the student as a design problem. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0780 | Tolgay Kara | Smart face mask with sensors | 2020 Fall | Omer Aker, , , | |||
|
Title: Smart face mask with sensors Overview of the project The main goal of the project is to design and manufacture a face mask that has smart features in addition to standard protection against Covid-19. The mask should be equipped with at least two sensors, and two smart features in conjunction with these sensors. Selection of sensors and features, and the method to activate them is left to the student as a design problem. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0779 | Tolgay Kara | Smart face mask with sensors | 2020 Fall | Mustafa Karalli, , , | |||
|
Title: Smart face mask with sensors Overview of the project The main goal of the project is to design and manufacture a face mask that has smart features in addition to standard protection against Covid-19. The mask should be equipped with at least two sensors, and two smart features in conjunction with these sensors. Selection of sensors and features, and the method to activate them is left to the student as a design problem. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0778 | Gölge Öğücü | Antenna at 5 GHz | 2020 Fall | Muhammed Serkan Bozgeyik, , , | |||
|
Title: Antenna at 5 GHz Overview of the project What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0777 | Gölge Öğücü | Antenna at 5 GHz | 2020 Fall | Ahmet Semih Akcam, , , | |||
|
Title: Antenna at 5 GHz Overview of the project What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0776 | Gölge Öğücü | Antenna at 2.4 GHz | 2020 Fall | Cagri Tunc, , , | |||
|
Title: Antenna at 2.4 GHz Overview of the project What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0775 | Gölge Öğücü | Antenna at 2.4 GHz | 2020 Fall | Firat Kurt, , , | |||
|
Title: Antenna at 2.4 GHz Overview of the project What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0774 | Mete Vural | Home Automation using C# and Arduino with Security Feature | 2020 Fall | Mehmet Fatih Gaser, , , | |||
|
Title: Home Automation using C# and Arduino with Security Feature Overview of the project What is the design in this project?
The project will be kept by the students to do with as they wish. |
|||||||
| 0773 | Mete Vural | Home Automation using C# and Arduino with Security Feature | 2020 Fall | Huseyin Erkmen, , , | |||
|
Title: Home Automation using C# and Arduino with Security Feature Overview of the project What is the design in this project?
The project will be kept by the students to do with as they wish. |
|||||||
| 0772 | Mete Vural | DC-DC Converter Design for Solar Photovoltaic Applications | 2020 Fall | Huru Gul Erdem, , , | |||
|
Title: DC-DC Converter Design for Solar Photovoltaic Applications Overview of the project What is the design in this project?
The project will be kept by the students to do with as they wish. |
|||||||
| 0771 | Mete Vural | DC-DC Converter Design for Solar Photovoltaic Applications | 2020 Fall | Seyfullah Cinar, , , | |||
|
Title: DC-DC Converter Design for Solar Photovoltaic Applications Overview of the project What is the design in this project?
The project will be kept by the students to do with as they wish. |
|||||||
| 0770 | Mete Vural | Occupancy Monitoring System for Covid-19 | 2020 Fall | Ibrahim Furkan Kayadelen, , , | |||
|
Title: Occupancy Monitoring System for Covid-19 Overview of the project What is the design in this project?
The project will be kept by the students to do with as they wish. |
|||||||
| 0769 | Mete Vural | Occupancy Monitoring System for Covid-19 | 2020 Fall | Muhterem Alper Kaplan, , , | |||
|
Title: Occupancy Monitoring System for Covid-19 Overview of the project What is the design in this project?
The project will be kept by the students to do with as they wish. |
|||||||
| 0768 | Mete Vural | Wireless Battery Charger | 2020 Fall | Ahmet Onur Cakir, , , | |||
|
Title: Wireless Battery Charger Overview of the project What is the design in this project?
The project will be kept by the students to do with as they wish. |
|||||||
| 0767 | Mete Vural | Wireless Battery Charger | 2020 Fall | Osman Nuri Yilmaz, , , | |||
|
Title: Wireless Battery Charger Overview of the project What is the design in this project?
The project will be kept by the students to do with as they wish. |
|||||||
| 0766 | Nuran Doğru | Digital Thermometer | 2020 Fall | Omer Kurt, , , | |||
|
Title: Digital Thermometer Overview of the project A portable digital thermometer will be designed and constructed. The thermometer should be able to display the temperature in four different scales (Fahrenheit, Celsius, Kelvin, and Rankine) and record and store the extreme temperatures reached in its environment. What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0765 | Nuran Doğru | Digital Thermometer | 2020 Fall | Ibragim Zuuridinov, , , | |||
|
Title: Digital Thermometer Overview of the project A portable digital thermometer will be designed and constructed. The thermometer should be able to display the temperature in four different scales (Fahrenheit, Celsius, Kelvin, and Rankine) and record and store the extreme temperatures reached in its environment. What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0764 | Nuran Doğru | Sending audio signals with a laser beam | 2020 Fall | Yasin Can Korkmaz, , , | |||
|
Title: Sending audio signals with a laser beam Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0763 | Nuran Doğru | Sending audio signals with a laser beam | 2020 Fall | Mevlut Kalkan, , , | |||
|
Title: Sending audio signals with a laser beam Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0762 | Nuran Doğru | PC to PC fiber optic communication | 2020 Fall | Bahtiyar Kalayci, , , | |||
|
Title: PC to PC fiber optic communication Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0761 | Nuran Doğru | PC to PC fiber optic communication | 2020 Fall | Umut Sunar, , , | |||
|
Title: PC to PC fiber optic communication Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0760 | Nuran Doğru | PC to PC laser communication | 2020 Fall | Ali Kazim Ural, , , | |||
|
Title: PC to PC laser communication Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0759 | Nuran Doğru | PC to PC laser communication | 2020 Fall | Muhammet Cahit Albay, , , | |||
|
Title: PC to PC laser communication Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0758 | Gölge Öğücü | Antenna for 5G system | 2020 Fall | Halil Cuma, , , | |||
|
Title: Antenna for 5G system Overview of the project What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0757 | Gölge Öğücü | Antenna for 5G system | 2020 Fall | Baris Emre Yalcin, , , | |||
|
Title: Antenna for 5G system Overview of the project What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0756 | Mahmut Aykaç | RF Energy Harvesting-2 | 2020 Fall | Berfin Insan, , , | |||
|
Title: RF Energy Harvesting-2 Overview of the project The student is expected to design and realize an RF Energy Harvesting circuit. The ultimate circuit must receive RF signals and convert them to usable power. Harvested power and voltage level must be displayed on a display. What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0755 | Mahmut Aykaç | RF Energy Harvesting-2 | 2020 Fall | Meryem Bayrak, , , | |||
|
Title: RF Energy Harvesting-2 Overview of the project The student is expected to design and realize an RF Energy Harvesting circuit. The ultimate circuit must receive RF signals and convert them to usable power. Harvested power and voltage level must be displayed on a display. What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0754 | Sema Kayhan | Health Monitoring of Patient using GSM | 2020 Fall | Furkan Dincoguz, , , | |||
|
Title: Health Monitoring of Patient using GSM Overview of the project What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0753 | Sema Kayhan | Health Monitoring of Patient using GSM | 2020 Fall | Burak Iyikesici, , , | |||
|
Title: Health Monitoring of Patient using GSM Overview of the project What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0752 | Sema Kayhan | Automatic Car Parking System | 2020 Fall | Mehmet Alpay Sadol, , , | |||
|
Title: Automatic Car Parking System Overview of the project What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0751 | Sema Kayhan | Automatic Car Parking System | 2020 Fall | Ali Tasdogan, , , | |||
|
Title: Automatic Car Parking System Overview of the project What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0750 | Gölge Öğücü | A robot going towards a sound source | 2020 Fall | Emre Arsanaci, , , | |||
|
Title: A robot going towards a sound source Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0749 | Gölge Öğücü | A robot going towards a sound source | 2020 Fall | Enes Bedevi, , , | |||
|
Title: A robot going towards a sound source Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0748 | Sema Kayhan | Intelligent Home System-Control | 2020 Fall | Ali Can Demirel, , , | |||
|
Title: Intelligent Home System-Control Overview of the project Tasks: What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0747 | Sema Kayhan | Intelligent Home System-Control | 2020 Fall | Mehmet Sah Sekerci, , , | |||
|
Title: Intelligent Home System-Control Overview of the project Tasks: What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0745 | Seydi Kaçmaz | COVID 19 - Temperature Screening | 2020 Fall | Mehmet Salih Gumus, , , | |||
|
Title: COVID 19 - Temperature Screening Overview of the project Fever is one of the most important symptoms in people with COVID 19 disease. In the presence of fever, the disease spread is considered to be at the highest level. Therefore, thermal cameras are used to detect suspicious persons with fever at the entrance of closed environments. Since thermal images must be continuously monitored in real time, smart systems are needed. In this project, it is aimed to make software that controls the temperature of people from images taken from a real-time thermal camera placed at the entrance and identifies suspicious persons accordingly. What is the design in this project? IMPORTANT NOTE: Since the use of thermal cameras is required, only those living in Gaziantep will be allowed to choose the project. The completed project will be kept by the supervisor for further use. |
|||||||
| 0744 | Seydi Kaçmaz | Noncontact Pulse Oximetry | 2020 Fall | Aysegul Arslan, , , | |||
|
Title: Noncontact Pulse Oximetry Overview of the project In advanced symptoms of Covid 19 disease, the oxygen concentration decreases as the lungs are badly affected. Generally, pulse oximeters are used for this purpose in hospitals. However, these devices are sometimes a problem due to the need for contact with the patient and the difficulty of continuous follow-up. In this project, a system will be designed to measure oxygen saturation without contact continuosly, consisting of a camera, light source and software that can interpret. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0743 | Seydi Kaçmaz | Noncontact Pulse Oximetry | 2020 Fall | Cansel Comertpay, , , | |||
|
Title: Noncontact Pulse Oximetry Overview of the project In advanced symptoms of Covid 19 disease, the oxygen concentration decreases as the lungs are badly affected. Generally, pulse oximeters are used for this purpose in hospitals. However, these devices are sometimes a problem due to the need for contact with the patient and the difficulty of continuous follow-up. In this project, a system will be designed to measure oxygen saturation without contact continuosly, consisting of a camera, light source and software that can interpret. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0742 | Seydi Kaçmaz | COVID 19 - Safe Environment Inspector | 2020 Fall | Ali Deliosman, , , | |||
|
Title: COVID 19 - Safe Environment Inspector Overview of the project Social distance and mask rules have been introduced in various countries in order to prevent the spread of Covid-19 disease. However, it is observed that these rules are frequently violated, especially when there is no control. Therefore, wearing masks and social distance should be constantly controlled with smart systems. In this project, it is aimed to develop software that can automatically detect violations in an environment monitored by a camera. This software must mark the violators on the image and also give the detailed information (date&time, violation type, image pixel location, etc.) of the records of all violations. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0741 | Seydi Kaçmaz | COVID 19 - Safe Environment Inspector | 2020 Fall | Ugur Karagoz, , , | |||
|
Title: COVID 19 - Safe Environment Inspector Overview of the project Social distance and mask rules have been introduced in various countries in order to prevent the spread of Covid-19 disease. However, it is observed that these rules are frequently violated, especially when there is no control. Therefore, wearing masks and social distance should be constantly controlled with smart systems. In this project, it is aimed to develop software that can automatically detect violations in an environment monitored by a camera. This software must mark the violators on the image and also give the detailed information (date&time, violation type, image pixel location, etc.) of the records of all violations. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0740 | Seydi Kaçmaz | Face Recognition with a Mask | 2020 Fall | Omar Alabiad, , , | |||
|
Title: Face Recognition with a Mask Overview of the project Today's facial recognition software studies the features around the eye, nose, mouth, and ears to identify an individual whose picture is already supplied, either by the individual or in a criminal database. However, wearing a mask obstructs this recognition. Since the use of masks has increased with Covid 19 disease, conventional Face ID systems cannot recognize people with a mask. In this project, it is aimed to make software that recognizes a person wearing a face mask. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0739 | Seydi Kaçmaz | Face Recognition with a Mask | 2020 Fall | Merve Demir, , , | |||
|
Title: Face Recognition with a Mask Overview of the project Today's facial recognition software studies the features around the eye, nose, mouth, and ears to identify an individual whose picture is already supplied, either by the individual or in a criminal database. However, wearing a mask obstructs this recognition. Since the use of masks has increased with Covid 19 disease, conventional Face ID systems cannot recognize people with a mask. In this project, it is aimed to make software that recognizes a person wearing a face mask. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0738 | Nurdal Watsuji | Vending finite state machine using Verilog HDL | 2020 Fall | Ramazan Gokturk, , , | |||
|
Title: Vending finite state machine using Verilog HDL Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0737 | Nurdal Watsuji | Vending finite state machine using Verilog HDL | 2020 Fall | Cengizhan Coban, , , | |||
|
Title: Vending finite state machine using Verilog HDL Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0736 | Nurdal Watsuji | Caricaturing a portrait image | 2020 Fall | Burak Kurkun, , , | |||
|
Title: Caricaturing a portrait image Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0735 | Nurdal Watsuji | Caricaturing a portrait image | 2020 Fall | Irem Emin, , , | |||
|
Title: Caricaturing a portrait image Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0734 | Nurdal Watsuji | Eye detection in still images | 2020 Fall | Baver Ergen, , , | |||
|
Title: Eye detection in still images Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0733 | Nurdal Watsuji | Eye detection in still images | 2020 Fall | Burcu Ercisli, , , | |||
|
Title: Eye detection in still images Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0732 | Nurdal Watsuji | Character detection in still images | 2020 Fall | Seda Cingoz, , , | |||
|
Title: Character detection in still images Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0731 | Nurdal Watsuji | Character detection in still images | 2020 Fall | Hayriye Arslan, , , | |||
|
Title: Character detection in still images Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0730 | Mahmut Aykaç | Touch Screen Controlled Smart Home System | 2020 Fall | Ali Ihsan Cengiz, , , | |||
|
Title: Touch Screen Controlled Smart Home System Overview of the project The student is expected to design and realize a touch screen controlled smart home system. In this system, there must be at least three elements in a atypical home to be controlled wirelessly. Once the user hits a button on the touch screen, he must be able to control (ON/OFF) an element of the home wirelessly. What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0729 | Mahmut Aykaç | Touch Screen Controlled Smart Home System | 2020 Fall | Yusuf Orum, , , | |||
|
Title: Touch Screen Controlled Smart Home System Overview of the project The student is expected to design and realize a touch screen controlled smart home system. In this system, there must be at least three elements in a atypical home to be controlled wirelessly. Once the user hits a button on the touch screen, he must be able to control (ON/OFF) an element of the home wirelessly. What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0728 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2020 Fall | Mouhammad Alali, , , | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0727 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2020 Fall | Busra Akbas, , , | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0726 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2020 Fall | Mehmet Ali Ceylan, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) Overview of the project In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0725 | Savaş Uçkun | Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) | 2020 Fall | Gokhan Ilhan, , , | |||
|
Title: Design and construction of a project which uses electromagnetic wave for transformation of data.(Project title will be determined by the designer.) Overview of the project In this project, carrying information/data from one device/part to other by way of EM waves will be used to design and construction of the project. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0724 | Taner İnce | Automatic car wiper | 2020 Fall | Akin Kosker, , , | |||
|
Title: Automatic car wiper Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0723 | Taner İnce | Automatic car wiper | 2020 Fall | Irmak Gokalp, , , | |||
|
Title: Automatic car wiper Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0722 | Taner İnce | Temperature and humidity recorder | 2020 Fall | Hazal Dag, , , | |||
|
Title: Temperature and humidity recorder Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0721 | Taner İnce | Temperature and humidity recorder | 2020 Fall | Sena Soylu, , , | |||
|
Title: Temperature and humidity recorder Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0720 | Taner İnce | Fingerprint based authentication system for door locks | 2020 Fall | Muhammed Selim Talay, , , | |||
|
Title: Fingerprint based authentication system for door locks Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0719 | Taner İnce | Fingerprint based authentication system for door locks | 2020 Fall | Nazife Tug, , , | |||
|
Title: Fingerprint based authentication system for door locks Overview of the project Specific components/tools:
What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0718 | Mahmut Aykaç | Smart Cooling Device for Electronic Circuits | 2020 Fall | Ali Turanbayburt, , , | |||
|
Title: Smart Cooling Device for Electronic Circuits Overview of the project In this project, student is expected to design and realize a smart cooling system for electronic circuits. Final circuit is to trigger a cooling system when the temperature is above a level and fan speed will be set according to the temperature of a sample circuit. Temperature of the sample circuit must also be observed on an LCD. What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0717 | Mahmut Aykaç | Smart Cooling Device for Electronic Circuits | 2020 Fall | Rehce Diken, , , | |||
|
Title: Smart Cooling Device for Electronic Circuits Overview of the project In this project, student is expected to design and realize a smart cooling system for electronic circuits. Final circuit is to trigger a cooling system when the temperature is above a level and fan speed will be set according to the temperature of a sample circuit. Temperature of the sample circuit must also be observed on an LCD. What is the design in this project? Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0716 | Tolgay Kara | Paper airplane with autonomous flight capability | 2020 Fall | Zekiye Orhan, , , | |||
|
Title: Paper airplane with autonomous flight capability Overview of the project The main goal of the project is to design and construct a motorized paper airplane that can fly autonomously. The airplane is supposed to avoid obstacles during flight. Shape and size of the airplane is left to the student as a design problem, as well as the electronics, power and control facilities required to fulfill the autonomous flight mission. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0715 | Tolgay Kara | Paper airplane with autonomous flight capability | 2020 Fall | Erkan Sahin, , , | |||
|
Title: Paper airplane with autonomous flight capability Overview of the project The main goal of the project is to design and construct a motorized paper airplane that can fly autonomously. The airplane is supposed to avoid obstacles during flight. Shape and size of the airplane is left to the student as a design problem, as well as the electronics, power and control facilities required to fulfill the autonomous flight mission. What is the design in this project?
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0714 | Arif Nacaroğlu | Number puzzle | 2020 Fall | Muhammet Emin Kilincoglu, , , | |||
|
Title: Number puzzle Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0713 | Arif Nacaroğlu | Number puzzle | 2020 Fall | Efgan Bozoglu, , , | |||
|
Title: Number puzzle Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0712 | Arif Nacaroğlu | Design and construction of the volume controllable hearing aid device | 2020 Fall | Nazan Ulusoy, , , | |||
|
Title: Design and construction of the volume controllable hearing aid device Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0711 | Arif Nacaroğlu | Design and construction of the volume controllable hearing aid device | 2020 Fall | Rahime Selbi, , , | |||
|
Title: Design and construction of the volume controllable hearing aid device Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0710 | Arif Nacaroğlu | The speech content converter by word replacement | 2020 Fall | Ahmet Bostanciklioglu, , , | |||
|
Title: The speech content converter by word replacement Overview of the project Gaps between the subsequent words will be soft and interuption must be minimized by using the digital filters. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0709 | Arif Nacaroğlu | The speech content converter by word replacement | 2020 Fall | Senem Gokpinar, , , | |||
|
Title: The speech content converter by word replacement Overview of the project Gaps between the subsequent words will be soft and interuption must be minimized by using the digital filters. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0708 | Arif Nacaroğlu | Encryption and decoding of the word text | 2020 Fall | Ahmet Serhat Sadi, , , | |||
|
Title: Encryption and decoding of the word text Overview of the project In the second part of the Project the program will be improved to obtain the original text from coded form with and without the conversion key-table. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0707 | Arif Nacaroğlu | Encryption and decoding of the word text | 2020 Fall | Yusuf Vakkasoglu, , , | |||
|
Title: Encryption and decoding of the word text Overview of the project In the second part of the Project the program will be improved to obtain the original text from coded form with and without the conversion key-table. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0706 | Mahmut Aykaç | Thermometer | 2020 Fall | Yusuf Savin, , , | |||
|
Title: Thermometer Overview of the project The student is expected to design and realize a remote thermoter based on IR temperature sensor and a microcontroller. The realized design must include an LCD displaying the temperature in Celcius and Frahrenheit scale and warn the user by alarm if the measured temperature is above 38 degree Celcius. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0705 | Mahmut Aykaç | Thermometer | 2020 Fall | Huseyin Burak Emre, , , | |||
|
Title: Thermometer Overview of the project The student is expected to design and realize a remote thermoter based on IR temperature sensor and a microcontroller. The realized design must include an LCD displaying the temperature in Celcius and Frahrenheit scale and warn the user by alarm if the measured temperature is above 38 degree Celcius. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0702 | Tolgay Kara | An autonomic robot | 2020 Spring | Mehmet Soyturk, Nuri Yemez, Mehmet Kara, Nihal Turgut | |||
|
Title: An autonomic robot Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0701 | Uğur Cem Hasar | TEKNOFAST SMART TRANSPORTATION COMPETITION - Artificial Garbage Base Transportation System | 2020 Spring | Bayram Aydede, Fatma Yildiz, Fatma Kizilirmak Korkmaz, Badel Cayli | |||
|
Title: TEKNOFAST SMART TRANSPORTATION COMPETITION - Artificial Garbage Base Transportation System Overview of the project An odor sensor will detect the temporal condition of the trash within the garbage can and will then alert the headquarter, if the odor level is above a threshold specified level, for its transportation through IoT (Internet of Things) via local internet supplemented by the municipal of the city Gaziantep. Besides, the transporter will optimize the garbage carriage duty using an artificial intelligence algorithm among many garbage cans that alert the headquarter. What is the design in this project? The completed project will be kept by the students or the supervisor depending on the agreement. |
|||||||
| 0700 | Mete Vural | Permanent Magnet Synchronous Motor | 2020 Spring | Muhammed Aslan, Cengiz Isci, Ali Baran Ozpolat, | |||
|
Title: Permanent Magnet Synchronous Motor Overview of the project The prototype will be designed with mechanical, electrical and magnetic analyses. SolidWorks, Matlab and Ansys Maxwell (2D and 3D) programs will be used in the design. The prototype will be tested in the electromechanical energy conversion laboratory. Specific components/tools:
What is the design in this project? Division of tasks Estimated budget is 350 TL with sponsorship. The project will be kept by the students to do with as they wish. |
|||||||
| 0699 | Musa Bute | TEKNOFEST now @Gaziantep # Model Satellite Competition II | 2020 Spring | Burak Tutucu, Ahmet Ayberk Karahasanoglu, Mahmut Arslan, Veli Aslanoglu | |||
|
Title: TEKNOFEST now @Gaziantep # Model Satellite Competition II Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0698 | Serkan Özbay | Fingerprint voting system | 2020 Spring | Ali Gocmen, Mehmet Kandamar, Berk Deger, | |||
|
Title: Fingerprint voting system Overview of the project The system will be capable of using fingerprint sensors to identify citizens, minimize the voting mistakes. The system will physicaly seal the ballots with servo motors and show the ballot to citizens by transparent panel and provide privacy by mixing the ballots and store them in a case. The system will eliminate mistakes like sealing the ballot in a wrong way. What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0697 | Serkan Özbay | Parser Robotic Arm | 2020 Spring | Sule Soyubelli, Cem Yuceer, Muhammed Yusuf Saglam, | |||
|
Title: Parser Robotic Arm Overview of the project In order for a factory to make mass production, it must be fast and produce products with minimum error. We will take the shape information of the products produced through image processing and determine them incorrectly or without errors. The robotic arm will distinguish the produced materials according to manufacturing errors. For example cracks, pits, lack of parts. The weights of the materials are 500 gr, 1000 gr and 1500 gr and they will be in the form of cubes, rectangular prisms and cylinders. The head of robotic arm will be in the form of a clamp and will be able to lift cube, rectangular prism, cylinder shapes. By image processing, we will compare the shape we introduced before with the shapes on the production line. The next step is; the robotic arm will be select on the production line and sort the products by category. The production line will work with the sensors and stop when the camera sees the product, wait for the robotic arm to receive the product, and when the product is picked up by the robotic arm, the production tape will work again. The robotic arm and mass production tape will be a remote control system in terms of today's technology such as Industry 4.0. Specific components/tools:
What is the design in this project? Division of tasks Estimated budget is 1143 TL. The project will be kept by the students to do with as they wish. |
|||||||
| 0696 | Mahmut Aykaç | The Educational Arduino Set | 2020 Spring | Dalal Saidi, Mohamed Alhazouri, Feyiz Elisa, | |||
|
Title: The Educational Arduino Set Overview of the project The set will consist of a Powerful Windows 10 Mini PC with IPS Display screen having Capacitive Touch Panel as an interface for the user to write the code of the project by a small keyboard. Additionally, it includes all Arduino equipments. The user will be able to write an Arduino program using the Mini PC which uses Windows 10 as an operating system. After being compiled, the written code will be sent to the Arduino microcontroller by a USB cable. The microcontroller card will be embedded inside the set. Variety of sensors will be available for the user to utilize according to the project wanted. To make it easy to use, the structure will be designed similar to a small laptop. Specific components/tools:
What is the design in this project? Division of tasks Estimated budget is 1375 TL. The project will be kept by the students to do with as they wish. |
|||||||
| 0695 | Musa Bute | Rewarding (or Punishing) The Speed Levels In Urban City Centres (TEKNOFEST, SMART TRANSPORTATION COMPETITION) | 2020 Spring | Aydin Boz, Aykut Zafer Ozel, Yusuf Dundar, | |||
|
Title: Rewarding (or Punishing) The Speed Levels In Urban City Centres (TEKNOFEST, SMART TRANSPORTATION COMPETITION) Overview of the project Otherwise, if the car approaches the smart bump in a slow speed level then the bump will be passive so that the car will be awarded by not harming car's tyres. What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0694 | Musa Bute | Non-Invasive (Contactless) Blood Sugar Level Measurement (TEKNOFEST,TECHNOLOGY FOR HUMANITY) | 2020 Spring | Mehmet Dabakoglu, Bedia Kaya, Ahmet Ozbaytemur, Yusuf Bagriyanik | |||
|
Title: Non-Invasive (Contactless) Blood Sugar Level Measurement (TEKNOFEST,TECHNOLOGY FOR HUMANITY) Overview of the project What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0693 | Mahmut Aykaç | RF Energy Harvester | 2020 Spring | Serhat Guler, Serhat Aktas, Mustafa Kirikci, | |||
|
Title: RF Energy Harvester Overview of the project Students are expexted to design and implement an RF (Radio Frequency) harvester circuit. This circuit will receive incoming signals and convert them into the available power. Operating frequency is optional but GSM band (900 MHz)is highly recommended. The power generated by the harvester will continously be displayed on an LCD. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0691 | Uğur Cem Hasar | Soil Property Measurement by a Drone System | 2020 Spring | Dogan Samsa, Enes Malik Agca, Aziz Murat Pektas, Mehmet Aytekin | |||
|
Title: Soil Property Measurement by a Drone System Overview of the project What is the design in this project? Division of tasks: The completed project will be kept by the students or the supervisor depending on the agreement. |
|||||||
| 0690 | Uğur Cem Hasar | Telemetry and Imaging System | 2020 Spring | Ibrahim Ince, Omer Faruk Suslu, Halit Bay, Ali Gozkiran | |||
|
Title: Telemetry and Imaging System Overview of the project In this project, a telemetry and imaging system will be made. Data transfer from a distance of at least 1 km should be provided with the proposed system in open area. GPS, temperature, vehicle direction, vehicle speed, battery voltage, remaining amount of power should be transferred at least once a second and live camera image via a moving vehicle. The received information and hash image should be instantly displayed on the central station. With this project, it is aimed that students can actively use microcontroller and sensors as well as basic programming languages such as python, C++, Java. What is the design in this project? Specific components/tools: The completed project will be kept by the students or the supervisor depending on the agreement. |
|||||||
| 0689 | Sema Kayhan | Object Sorting by Robotic Arm Using Image Processing | 2020 Spring | Ceren Cakir, Sema Nur Demir, Betul Dundar, | |||
|
Title: Object Sorting by Robotic Arm Using Image Processing Overview of the project
What is the design in this project Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0688 | Musa Bute | Suit Up With Virtual Room for Online Shopping | 2020 Spring | Batuhan Ekren, Dilara Kilinc, Furkan Ceker, Deniz Selvitopu | |||
|
Title: Suit Up With Virtual Room for Online Shopping Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0687 | Uğur Cem Hasar | Autonomous Taxi Development Project | 2020 Spring | Yunus Emre Gokcek, Merve Nur Demir, Mucahit Fatih Erkmen, | |||
|
Title: Autonomous Taxi Development Project Overview of the project Simultaneous processing of information such as GPS, Direction, Speed, Lidar, Radar, Camera, Battery Tracking System, Temperature, Humidity expected in the autonomous vehicle in the simulation environment.Starting the task autonomously according to the traffic signs of the vehicle, taking passengers, downloading passengers, etc. are expected to do the tasks. The project must be run in at least two simulation environments. Simulation Programs to be Used: Gazebo, Unity, Unreal Engine, LGSVL / Simulator, Matlab etc. all simulation environments. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0686 | Musa Bute | TEKNOFEST now @Gaziantep # Model Satellite Competition I | 2020 Spring | Nurgul Ibili, Suvba Kablander, Emine Busra Acici, Muharrem Tuttokmagi | |||
|
Title: TEKNOFEST now @Gaziantep # Model Satellite Competition I Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0685 | Tolgay Kara | Cartesian robot with replaceable sensor probes and 3D position control | 2020 Spring | Cem Gokalp, Mahmoud Aljabal Alkurdy, Yaman Afoura, Kubilay Aytac Deniz | |||
|
Title: Cartesian robot with replaceable sensor probes and 3D position control Overview of the project Cartesian robot with a rectangular frame will be constructed. Temperature, flow and humidity sensors will be used as replaceable parts. Accurate positioning of the probes is required. A sequence of cartesian coordinates in 3D will be the set value for position control. Sensor data will be transmitted to the supervisory control unit (e.g. computer) wirelessly. Position control command will be generated (entered) at the supervisory control unit. The robot is expected to fulfill the task of collecting measurements from multiple positions in 3D. What is the design in this project?
Division of Tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0683 | Sema Kayhan | Smart Greenhouse | 2020 Spring | Emir Elhafiz, Anas Osman, Ismail Haj Osman, | |||
|
Title: Smart Greenhouse Overview of the project Using sensors which continuously send data about humidity and temperature to the electronic microcontroller (PIC), the system adjusts both conditions by turning on/off the conditioning system. Watering system is based on a soil moisture sensor which sends information to the platform which give orders to the compressor which waters the plants. Also, a water tank is involved in the system with a level sensor to fill it in accordingly. One of the most significant features of this project is the feedback operation. By processing the data received from all the sensors involved in each section the system will choose the best course of action maintaining the suitable conditions in the greenhouse. All those circuits will be made on a pcb board and it can be used in any greenhouse (one of the advantages of the project), also connected with a Wi-Fi and controlled remotely with a phone application (apk). Specific components/tools:
What is the design in this project? Division of tasks Estimated budget is 700 TL. The project will be kept by the students to do with as they wish. |
|||||||
| 0682 | Uğur Cem Hasar | Wireless Rear-View Camera System | 2019 Fall | Oguzhan Dogan, Ramazan Altan Turksever, Ali Tomak, | |||
|
Title: Wireless Rear-View Camera System Overview of the project What is the design in this project?
Division of Tasks
Requirements
The completed project will be kept by the supervisor for further use. |
|||||||
| 0681 | Uğur Cem Hasar | Design a Vivaldi Antenna for Broadband Measurements | 2019 Fall | Kubra Cakir, Emine Elif Pekduru, Erman Sert, | |||
|
Title: Design a Vivaldi Antenna for Broadband Measurements Overview of the project What is the design in this project?
Division of Tasks
Specific components/tools:
Note: Students who will work in this project are not expected to have an intermediate level of the knowledge of the electromagnetic theory. The completed project will be kept by the supervisor for further use. |
|||||||
| 0680 | Serkan Özbay | Remote Smart Locking System by Speech Recognition | 2019 Fall | Yunus Emre Ceylan, Mustafa Aslan, Cihan Ayhan, Melih Can Tokus | |||
|
Title: Remote Smart Locking System by Speech Recognition Overview of the project In order to fulfill the objective, this system will need microcontroller, microphone, power supply and buzzer. The motor and motor drivers will be also required to control the door. What is the design in this project? The project will be kept by the supervisor for further use. |
|||||||
| 0679 | Serkan Özbay | Remote Smart Locking System by Face Recognition | 2019 Fall | Ali Seza Acar, Seyfettin Yuzugulec, Seyma Tuzun, Mustafa Abali | |||
|
Title: Remote Smart Locking System by Face Recognition Overview of the project When the person comes in front of the door, it will recognize the face and if it is registered then it will unlock the door, if the face is not registered it will raise an alarm and will take a photo. What is the design in this project? The project will be kept by the supervisor for further use. |
|||||||
| 0678 | Nuran Doğru | Autonomous Rover with LIDAR Sensor | 2019 Fall | Ibrahim Bozdal, Metin Acar, Erhan Bulucu, Mucahit Deder | |||
|
Title: Autonomous Rover with LIDAR Sensor Overview of the project When we are modelling this mission we are preparing a course with some obstacles and a sample that will be taken. Vehicle's framework formed by plastic material. It looks like a car has only chasis and it has six wheels. There is rotating LIDAR sensor top of the vehicle. Vehicle dimensions are approximately 30 cm length and 10 cm width. Electronic parts are located at middle of the vehicle. LIDAR sensor measures distance by illuminating laser beam to obstacle and its reflection time. Because of high prices of rotating LIDAR sensors,a mechanical design consists of rotating cable slip ring, motor and gearwheel will be used to rotate the sensor. A python script with some libraries that we haven't decided yet works on Rasperry Pi creates 2D map of environment. After that script calculates which motor will rotates how much this information is sended to MCU and MCU controls motors. Wtih this way vehicle reaches to the sample and takes it after that vehicle brings it back to the base area on the course. Also created map can be used by other vehicles. What is the design in this project? Specific components/tools:
Estimated budget is 1065 TL. The project will be kept by the students to do with as they wish. |
|||||||
| 0677 | Taner İnce | Robot-taxi | 2019 Fall | Tugce Bayri, Shamsudeen Muhammad Rabiu, Biram Bawo, | |||
|
Title: Robot-taxi Overview of the project Ultrasonic sensors will be attached at various locations on the car to determine objects in front of the car, making the taxi an extremely safe ride for passengers. The taxi will also be able to map the coordinates of its passengers, which will be communicated via Wi-Fi, pick them up and take them to their destination. In the case there is no passenger, the car just patrols the track. Specific components/tools:
What is the design in this project? Division of tasks Estimated budget is 400 TL. The project will be kept by the students to do with as they wish. |
|||||||
| 0676 | Tolgay Kara | Plate and fan control system | 2019 Fall | Ahmet Furkan Kavakli, Anil Seyit Kaya, Ruya Coskun, Rahmi Mert Tosun | |||
|
Title: Plate and fan control system Overview of the project An experimental laboratory control system setup with a fan and a plate will be designed and contructed. The fan will be used as the actuator of the feedback control system, and the plate's angular position will be the controlled variable. PID control will be designed using experimental methods of Ziegler and Nichols. Closed-loop PID control tests will be implemented, results will be discussed. What is the design in this project?
Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0675 | Tolgay Kara | Wearable guide for the visually impaired | 2019 Fall | Emine Kaya, Eda Seyma Guler, Tural Abdullayev, | |||
|
Title: Wearable guide for the visually impaired Overview of the project A wearable device for the visually impaired will be designed and constructed. The device should be equipped with a camera and a distance sensor in order to protect the user from obstacles and approaching objects. Additionally a sound sensor will be used to warn the user when a loud horn sound is heard. What is the design in this project?
Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0674 | Mahmut Aykaç | Following Distance Detector | 2019 Fall | Ibrahim Sunger, Kadir Aykut, Deniz Karakas, | |||
|
Title: Following Distance Detector Overview of the project The students are expected to design a system to detect the following distance between two moving cars (in a video) on a flowing traffic. System will decide if following car is violating the traffic rules What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0673 | Mahmut Aykaç | Smart Glove for Sign Translation | 2019 Fall | Merve Nur Koska, Selen Nur Ayhan, Fatma Zehra Kardas, | |||
|
Title: Smart Glove for Sign Translation Overview of the project The students are expected to design and realize a system that converts the sign language characters into voice commands and also displays the converted characters through wireless communication on a display or on the cell phone via an application What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0672 | Ergun Erçelebi | Development of Brushless DC Motor Driver | 2019 Fall | Omer Sari, Huseyin Can, Melike Doner, | |||
|
Title: Development of Brushless DC Motor Driver Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0671 | Sema Kayhan | Guiding System for Blind People | 2019 Fall | Can Demirhan, Mustafa Furkan Kalkan, Baris Kulluk, | |||
|
Title: Guiding System for Blind People Overview of the project The electronic travel aid can be provided by designing an assistive belt consists of some guiding parts: dealing with the obstacles from different aspects and guiding according to them, localization system for navigation, and emergency SMS in case of getting lost or needing help. All the given feedbacks should be hearable or tactile to achieve the user requirements according to the nature of the blind's senses. What is the design in this project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0670 | Nuran Doğru | Heart Attact Detection System | 2019 Fall | Sururi Can Kus, Fehmi Gokce, Ali Hayirdiler, | |||
|
Title: Heart Attact Detection System Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0669 | Taner İnce | Visual Object Recognition for People having Visual Impairment | 2019 Fall | Arda Unal, Halil Ibrahim Simsek, Huseyin Kilic, Metehan Kozan | |||
|
Title: Visual Object Recognition for People having Visual Impairment Overview of the project What is the design in this project? Tools:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0668 | Musa Bute | DESIGN A WEATHER STATION FOR UNIVERSITY CAMPUSES | 2019 Fall | Ali Doganay, Imam Eyyup Elci, Burak Gokkaya, Muhammed Mayan | |||
|
Title: DESIGN A WEATHER STATION FOR UNIVERSITY CAMPUSES Overview of the project What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0667 | Musa Bute | DESIGN A TAXIMETER FOR DRONE TAXI SERVICES | 2019 Fall | Refahaddin Erbek, Volkan Doner, Mehmet Kerem Gungor, | |||
|
Title: DESIGN A TAXIMETER FOR DRONE TAXI SERVICES Overview of the project Specific components/tools:
What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0666 | Mete Vural | Thyristor-controlled rectifier fed from three-phase source | 2019 Fall | Mustafa Oztunc, Burak Ozer, Hanife Caliskan, | |||
|
Title: Thyristor-controlled rectifier fed from three-phase source Overview of the project Rectifiers are frequently used in electronic systems and industrial applications to convert AC power into DC power. Using diode in rectifier is a simple and cheap solution, however the output voltage cannot be controlled if input voltage is fixed. A better solution is to use thyristor instead of diode so that the output voltage can be controlled even if the input voltage is fixed. In this project the students will design a thyristor-controlled rectifier fed from three-phase source having the following attributes, but not limited to:
What is the design in this project? The components that will be used in this project are:
Division of tasks:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0665 | Ergun Erçelebi | Development of Scientific Calculator | 2020 Spring | Ihsan Tumay, Mehmet Erkmen, Asel Ozyurek, | |||
|
Title: Development of Scientific Calculator Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0664 | Ergun Erçelebi | Development of Digital multimeter using microcontroller | 2019 Fall | Muslum Samsum, Ali Eroglu, Abdullah Gunduz, Ismail Reyhani | |||
|
Title: Development of Digital multimeter using microcontroller Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0663 | Ergun Erçelebi | Converting manual wheelchair to electric powered trike | 2020 Spring | Tugba Kucukturkmen, Sumeyye Emre, Omer Ozdemir, | |||
|
Title: Converting manual wheelchair to electric powered trike Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0662 | Ergun Erçelebi | Development of autonomous car | 2019 Fall | Halil Ibrahim Soker, Serdar Sevimli, Umit Kurtoglu, | |||
|
Title: Development of autonomous car Overview of the project The Project will mainly be composed of such components as sensors, actuators, and autonomous vehicle software. Sensors can be GPS/Inertial Measurement Unit (IMUs), camera, LiDar, and radar. Actuators are the components of a machine responsible for controlling and moving the system. The details of the project will be given in face to face meetings with the supervisor. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0661 | Ergun Erçelebi | DEVELOPMENT OF AUTONOMOUS QUADCOPTER | 2019 Fall | Alperen Utma, Furkan Uluocak, Osman Ozev, | |||
|
Title: DEVELOPMENT OF AUTONOMOUS QUADCOPTER Overview of the project Specific components/tools:
What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0660 | Nurdal Watsuji | Autonomous self parking car | 2019 Fall | Atakan Bahadir, Ibrahim Tas, Ugur Gunes, | |||
|
Title: Autonomous self parking car Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0659 | Seydi Kaçmaz | 4WD Omnidirectional Wheeled Autonomous Car controlled by remote GPS data | 2019 Fall | Emre Bayraktar, Mehmet Akdis, Yusuf Circir, | |||
|
Title: 4WD Omnidirectional Wheeled Autonomous Car controlled by remote GPS data Overview of the project This project aims to the design and implementation of 4WD omnidirectional wheeled autonomous car that can access the given GPS position as quickly as possible. It should be capable of moving in an arbitrary direction continuously without changing the direction of the wheels on the way to the destination. In addition, the vehicle should detect obstacles and create new routes accordingly. The developed prototype will be consisted of a microcontroller, a GPS module, a RC module, DC motors with encoders and a RC remote. What is the design in this project? IMPORTANT NOTE: Good programming knowledge is rrequired. The completed project will be kept by the supervisor for further use. |
|||||||
| 0658 | Seydi Kaçmaz | Portable Night Vision Camera | 2020 Spring | Fatma Kubra Ozdemir, Uday Ciplak, Nurettin Emre Alkan, | |||
|
Title: Portable Night Vision Camera Overview of the project This project aims to the design and implementation of a portable night vision camera for capture images and video in dark environments. The developed device will be consisted of the Raspberry Pi Zero (Mini-computer), Raspberry Pi Pi NoIR Camera V2 (An Infrared Camera), and Pimoroni HyperPixel 4.0 (4-inch LCD Touchscreen). The developed prototype set is capable of:
What is the design in this project? IMPORTANT NOTE: Good programming knowledge is required, especially Python. The completed project will be kept by the supervisor for further use. |
|||||||
| 0657 | Uğur Cem Hasar | Traffic Sign Detection System | 2020 Spring | Emrullah Demir, Huseyin Gunes, Sidika Merve Yaroglu, | |||
|
Title: Traffic Sign Detection System Overview of the project What is the design in this project?
Specific components/tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0655 | Arif Nacaroğlu | Goal Keeper | 2019 Fall | Selin Kayhan, Ali Tas, Burak Yildirim, | |||
|
Title: Goal Keeper Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0654 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2019 Spring | Muslum Kaya, Mehmet Kilic, Okan Parlak, Osman Koksal | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the students. The suggestion must be original and a novel application of RFID in daily life. The specifications of the project will be discussed with the advisor and will be decided before project starts. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0653 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2019 Spring | Yunus Emre Arslan, Hakan Erkengel, Hilal Yildiz, | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the students. The suggestion must be original and a novel application of RFID in daily life. The specifications of the project will be discussed with the advisor and will be decided before project starts. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0652 | Tolgay Kara | Development of Balancing System with Arduino | 2019 Spring | Hasan Karaoglan, Ali Hazar, Emsal Korkmaz , | |||
|
Title: Development of Balancing System with Arduino Overview of the project To keep the truck balanced, the motors must counteract when the truck unstable. This action requires feedback and correcting elements. The feedback element is the MPU6050 gyroscope + accelerometer, which gives both acceleration and rotation in axes. The Arduino uses this too know the current orientation of the robot.ô The correcting element i the motor and wheel combination. This Project aims to redress the balance for a trailer truck's bed when the trailer truck is near imminence of crash. The developed prototype set is capable of:
What is the design in this project? Division of tasks Tools Estimated budget is 400-500 TL. The project will be kept by the students to do with as they wish. |
|||||||
| 0651 | Taner İnce | TV remote controlled garbage cleaning robot | 2019 Spring | Muhammed Ali Kanadli, Ibrahim Halil Boran, Asman Ibraimov, | |||
|
Title: TV remote controlled garbage cleaning robot Overview of the project What is the design in this project? Tools:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0650 | Mahmut Aykaç | Organize Collecting Bags at Airports | 2019 Spring | Amro Mansour, Ahmed Muhammed Serif, Mohamad Moaz Mosto , | |||
|
Title: Organize Collecting Bags at Airports Overview of the project Objectives
|
|||||||
| 0649 | Tolgay Kara | Autonomous Rescue Robot | 2019 Spring | Namik Kemal Gungor, Ensar Mujdeci, Ibrahim Batuhan Yurekli, Batuhan Muslu | |||
|
Title: Autonomous Rescue Robot Overview of the project In this project an autonomous rescue robot with certain features will be developed. The robot should be able to,
What is the design in this project?
Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0648 | Mahmut Aykaç | A Portable Retro Game Console Based on Microcontroller | 2019 Fall | Derya Merve Yildiz, Mustafa Aksoy, Seda Beyaz, | |||
|
Title: A Portable Retro Game Console Based on Microcontroller Overview of the project Students are expected to design and realize a portable retro game console. The console has a TFT LCD display with a touch screen as user interface. The console must have at least two different playable games that can be switched through touch screen and must be battery-powered. What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0647 | Ergun Erçelebi | DEVELOPMENT OF ELECTRONIC CONTINUATION CHART BASED ON FACE RECOGNITION | 2019 Spring | Emrah Uzdilli, Furkan Kadir Kaygusuz, Salman Burak Yesilbag, | |||
|
Title: DEVELOPMENT OF ELECTRONIC CONTINUATION CHART BASED ON FACE RECOGNITION Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0646 | Ergun Erçelebi | DEVELOPMENT OF EMBEDDED SYSTEM FOR SMART HOME | 2019 Spring | Halil Devecioglu, Muhammet Ali Akar, Yusuf Erol, | |||
|
Title: DEVELOPMENT OF EMBEDDED SYSTEM FOR SMART HOME Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0645 | Ergun Erçelebi | DEVELOPMENT OF H-BRIDGE INVERTER FOR CONTROLLING SPEED OF SINGLE PHASE INDUCTION MOTORS | 2019 Fall | Mervan Babat, Halil Ibrahim Ileri, Mehmet Salih Acar, | |||
|
Title: DEVELOPMENT OF H-BRIDGE INVERTER FOR CONTROLLING SPEED OF SINGLE PHASE INDUCTION MOTORS Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0644 | Mete Vural | Single-Phase Smart Energy Meter | 2019 Spring | Nurbanu Sevindi, Soysal Muhammet Samsum, Emre Isildak, Mehmet Arda Sahin | |||
|
Title: Single-Phase Smart Energy Meter Overview of the project The determination and transfer of electrical energy consumption data are important in evolving smart power grid applications. In this project, the students will design a single-phase energy meter using Arduino that has the following features:
The other details of the work are:
What is the design in this project? The components that will be used in this project are:
Division of tasks:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0643 | Mahmut Aykaç | Microcontroller-based Music Player | 2019 Spring | Ahmet Alkan GokpáÝnar, Resul AydáÝn, Nazire Eylem Yucel, | |||
|
Title: Microcontroller-based Music Player Overview of the project The students are expected to design and realize a microcontroller-based music player (Music format may be MP3, MPEG or any desired one). The music player must have a user interface, which includes volume up/down, switch songs (at least 20 songs in SD card), bass and treble controls and artist info such as photo, on a TFT LCD display with touch screen. All these controls must be reached through touch screen. Furthermore, music player must be battery powered and portable. What is the design in this project? Specific components/tools:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0642 | Seydi Kaçmaz | Automated Chess Piece Mover | 2019 Spring | Tolga Balatlioglu, Raafat Aziza, Moustafa Idris, | |||
|
Title: Automated Chess Piece Mover Overview of the project This project aims to the design and implementation of an automated chess piece mover for chess game according to given movement codes. The automated chess piece mover consists of the x-y actuator and chess piece holder that can hold and release. The developed prototype set is capable of: (i) detecting the position and type of the chess pieces, (ii) providing automated chess pieces movement by using real-time or predetermined PGN format (ii) displaying the real situation of the chess game in computer screen by connecting to any of a wide variety of PC chess software*.
What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0641 | Seydi Kaçmaz | Electronic Chessboard Set | 2020 Spring | Umut Polat, Muhammed Said Tunc, Daghan Dalli, | |||
|
Title: Electronic Chessboard Set Overview of the project This project aims to the design and implementation of an electronic chess set for chess tournaments or educational purposes. The electronic chessboard set consists of the electronic chessboard, pieces and the chess clock. The developed prototype set is capable of: (i) detecting the position and type of the chess pieces, (ii) showing the valid destinations for the current chess piece, (iii) playing chess against human or robotic system without human assistance (iv) providing chess pieces movement code generation in PGN format and (v) displaying the real situation of the chess game in computer screen by connecting to any of a wide variety of PC chess software*.
What is the design in this project? The completed project will be kept by the supervisor for further use. |
|||||||
| 0640 | Nurdal Watsuji | WSN-IoT Network For Monitoring Soil Properties | 2018 Fall | Basel Faraj, Dicle Durak, Burak Karakoyunlu , | |||
|
Title: WSN-IoT Network For Monitoring Soil Properties Overview of the project What is the design in this project? Division of tasks Tools Estimated budget is 500 TL. The project will be kept by the students to do with as they wish. |
|||||||
| 0639 | Nuran Doğru | CNC PCB PLOTTER | 2018 Fall | Mustafa Ozkaya, Ali Subasi, Ahmet Afsin, Mustafa Kaya | |||
|
Title: CNC PCB PLOTTER Overview of the project What is the design in this project? The project will be kept by the students to do with as they wish. |
|||||||
| 0638 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2018 Fall | Beyza Ozturk, Yunus Ors, Hamza Sevim, | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the students. The suggestion must be original and a novel application of RFID in daily life. The specifications of the project will be discussed with the advisor and will be decided before project starts. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0637 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2018 Fall | Haci Devrim Tokkatli, Gizem Nur Buzkan, Mert Metin, | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the students. The suggestion must be original and a novel application of RFID in daily life. The specifications of the project will be discussed with the advisor and will be decided before project starts. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0636 | Gölge Öğücü | Safe Squating | 2019 Fall | Emre Cagri Sabanci, Sinan Kepik Dal, Eyup Or, | |||
|
Title: Safe Squating Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0635 | Gölge Öğücü | Robotic Waiter | 2018 Fall | Taha a Kilinc, Enes Doganoglu, Oguzhan Nedim Kaya, | |||
|
Title: Robotic Waiter Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0634 | Gölge Öğücü | Whiteboard Erasing Robot | 2018 Fall | Hasan Dagdelen, Ayse Cakir, Yekbun Gun, | |||
|
Title: Whiteboard Erasing Robot Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0633 | Mete Vural | Five-level single-phase cascaded H-bridge inverter design | 2018 Fall | Muhammed Mucahit Boz, Mert Kalinli, Abdulkadir Cellik, | |||
|
Title: Five-level single-phase cascaded H-bridge inverter design Overview of the project The inverter is a power electronic based circuit which is used to obtain an AC controllable power from a DC power source. In this project, the students will design a three-level single-phase cascaded H-bridge inverter for a 50 W photovoltaic system. The inverter will have the following features:
What is the design in this project? Division of tasks:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0632 | Mete Vural | Three-level single-phase flying capacitors inverter design | 2018 Fall | Cem Boynuegri, Furkan Birkan, Cuma Can Ihtiyat, | |||
|
Title: Three-level single-phase flying capacitors inverter design Overview of the project The inverter is a power electronic based circuit which is used to obtain an AC controllable power from a DC power source. In this project, the students will design a three-level single-phase flying capacitors inverter for a 50 W photovoltaic system. The inverter will have the following features:
What is the design in this project? Division of tasks:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0631 | Savaş Uçkun | Design and Construction by Using RFID.(Project name will be determined by the designers) | 2018 Fall | Busra Celik, Cansu Soysuren, Sinem Nursel Cologlu, | |||
|
Title: Design and Construction by Using RFID.(Project name will be determined by the designers) Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the students. The suggestion must be original and a novel application of RFID in daily life. The specifications of the project will be discussed with the advisor and will be decided before project starts. What is the design in this project? The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0630 | Serkan Özbay | Implementation of Secure Data Communication (encryption/decryption) | 2018 Fall | Enes Gocer, Tugrul Eryilmaz, Gulcan Tikiz, | |||
|
Title: Implementation of Secure Data Communication (encryption/decryption) Overview of the project The project will include embedded systems and they will communicate via secure communication scheme. The systems can be chosen by students and data type could be image, video, or any type. What is the design in this project? The project will be kept by the students to do with as they wish.. |
|||||||
| 0629 | Mete Vural | Three-level single-phase neutral point clamped inverter design for a 50W | 2018 Fall | Yavuz Selim Doguer, Omer Polat, Burhan KanadáÝkáÝráÝk, | |||
|
Title: Three-level single-phase neutral point clamped inverter design for a 50W Overview of the project The inverter is a power electronic based circuit which is used to obtain an AC controllable power from a DC power source. In this project, the students will design a three-level single-phase neutral point clamped inverter for a photovoltaic system. The inverter will have the following features:
What is the design in this project? Division of tasks:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0628 | Serkan Özbay | Self-Driving Car with Neural Network | 2018 Fall | Selim Akbudak, Fikret Yildirim, Zarif Ahamed, Elif Sogutcu | |||
|
Title: Self-Driving Car with Neural Network Overview of the project What is the design in this project?
Division of Tasks
Estimated budget is 906 TL. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0627 | Ergun Erçelebi | Development of AC Motor Driver Circuit | 2018 Fall | Gamze Dogan, Mustafa Ceviz, Soner Yilan, | |||
|
Title: Development of AC Motor Driver Circuit Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0626 | Ergun Erçelebi | Development of Autonomous Quadcopter | 2018 Fall | Dilan Mut, Erkan Dinler, Mustafa Tasdemir, Mustafa Mercan | |||
|
Title: Development of Autonomous Quadcopter Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0625 | Ergun Erçelebi | Development of home security system based on face recognition | 2018 Fall | Mehmet Ali Sahin, Feridun Emre, Caner Maden, | |||
|
Title: Development of home security system based on face recognition Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0624 | Ergun Erçelebi | Development of Driverless Car | 2018 Fall | Mahmet Ali Colak, Tolga Bulut, Ali Bilici, | |||
|
Title: Development of Driverless Car Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0623 | Ergun Erçelebi | Implementation of an Automated Irrigation System powered by solar energy | 2018 Fall | Onur Coban, Devrim Cetinkaya, Ersel Arslan, | |||
|
Title: Implementation of an Automated Irrigation System powered by solar energy Overview of the project In the Project, students will develop an automated irrigation system based on sensors which are interfaced to the microcontroller unit. The sensors used in this paper will be temperature and humidity sensor and soil moisture. These sensors a will be interfaced to the microcontroller unit and the whole unit will be placed under the root zone of the plant. The main motive of using microcontroller will be to send an SMS to the mobile phone of an owner who will be in the remote location. The sending of SMS will be done by using SIM module which will be also interfaced to the microcontroller unit. The system will be supplied by photovoltaic solar energy. The irrigation system will be tested under different temperatures and humidity levels of different plants under normal and wet conditions. Project details will then be given to the students. What is the design in this project? Specific components/tools The completed project will be donated to the department for display or lab. |
|||||||
| 0622 | Taner İnce | Garbage cleaning robot | 2018 Fall | Ilkay Alibekiroglu, Semsettin Ocak, Abdullah Karaoglan, | |||
|
Title: Garbage cleaning robot Overview of the project What is the design in this project? Tools:
The completed project will be donated to the department for display or lab. |
|||||||
| 0621 | Taner İnce | Voice controlled object collecting robotic vehicle | 2018 Fall | Ahmet Said Dedeoglu, Furkan Karaoglu, Furkan Melih Efe, | |||
|
Title: Voice controlled object collecting robotic vehicle Overview of the project What is the design in this project? Tools:
The completed project will be donated to the department for display or lab. |
|||||||
| 0620 | Arif Nacaroğlu | Shape Hunter | 2018 Fall | Koray Tas, Utku Cekmegul, Emre Aksakal, | |||
|
Title: Shape Hunter Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0619 | Arif Nacaroğlu | Music Notes Shifter | 2019 Fall | Mehmet Dag, Mehmet Kilic, Eyup Yalavuz, Mustafa Sinan Surucu | |||
|
Title: Music Notes Shifter Overview of the project What is the design in this project? The completed project will be kept by the students to do with as they wish. |
|||||||
| 0618 | Nuran Doğru | Four Axis Controllable Electromagnetic Accelerator With Radar System | 2018 Fall | Melih Cakirtas, Huseyin Serhat Ozturk, Seyda Akdogan, | |||
|
Title: Four Axis Controllable Electromagnetic Accelerator With Radar System Overview of the project What is the design in this project?
Division of Tasks
Estimated budget is 428 TL. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0617 | Serkan Özbay | Design and Construction of Secure Automated Storage System | 2018 Fall | Suleyman Furkan Ayhan, Mehmet Akif Ozkaya, Huseyin Yilmaz, | |||
|
Title: Design and Construction of Secure Automated Storage System Overview of the project To access items, users will first identify themselves through fingerprint, RFID card, or username and password. When the correct identification is met, the drawer containing the item will pop open, keeping all other items secured and restricted in other drawers. The user will then close the drawer so that it will be locked. What is the design in this project? The project will be kept by the supervisor for further use. |
|||||||
| 0616 | Uğur Cem Hasar | Design and Construction of a Magnetic Levitation Train | 2018 Fall | Yakup Adiyan, Burak Yarisanozer, Erkan Baykal, Ahmet Topbasli | |||
|
Title: Design and Construction of a Magnetic Levitation Train Overview of the project
Division of Tasks
Requirements:
|
|||||||
| 0615 | Arif Nacaroğlu | Design and Different Implementations of 3D printers | 2018 Fall | Yusuf Demir, Kubilay Kerti, Mustafa Unal, Zeynep Sulhan | |||
|
Title: Design and Different Implementations of 3D printers Overview of the project What is the design in this project?
Division of Tasks
Estimated budget is 1118 TL. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0614 | Tolgay Kara | A small and lighweight fixed-wing UAV with autonomous VTOL flight | 2018 Fall | Berk Topcuoglu, Mehmet Burak Tursun, Isa Nezih Sayilirbas, | |||
|
Title: A small and lighweight fixed-wing UAV with autonomous VTOL flight Overview of the project What is the design in this project?
The completed project will be kept by the supervisor for further use. |
|||||||
| 0613 | Tolgay Kara | Position control of a 2 DOF gantry crane | 2018 Fall | Burhan Baksi, Gulseren Genc, Bengu Keskin, | |||
|
Title: Position control of a 2 DOF gantry crane Overview of the project What is the design in this project?
Division of Tasks:
The completed project will be donated to the department for display or lab. |
|||||||
| 0612 | Tolgay Kara | Agricultural robot for harvesting red vegetables | 2018 Fall | Mehmet Aslan, Mirza Mehmet Yucel, Saban Kocak, Tugay Kati | |||
|
Title: Agricultural robot for harvesting red vegetables Overview of the project What is the design in this project?
Division of Tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0611 | Nurdal Watsuji | Street Light that Glows on Detecting Vehicle | 2018 Fall | Ibrahim Demir, Mahir Mustafa Ato, Ceylan Yildiz, | |||
|
Title: Street Light that Glows on Detecting Vehicle Overview of the project What is the design in this project?
Division of tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0610 | Nurdal Watsuji | Portable oscilloscope based on Arduino - A | 2018 Spring | Kemal Celebi, , , | |||
|
Title: Portable oscilloscope based on Arduino - A Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0609 | Ergun Erçelebi | Development of Metal Detect Robot | 2018 Spring | Koray Arikan, Gul Beste Han Al, , | |||
|
Title: Development of Metal Detect Robot Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0608 | Ergun Erçelebi | Development of Buck and Boost Converter with microcontroller | 2018 Spring | Ali Erden, , , | |||
|
Title: Development of Buck and Boost Converter with microcontroller Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0607 | Gölge Öğücü | IoT Home Automation | 2018 Spring | Emirhan Coban, Tolga Deniz, , | |||
|
Title: IoT Home Automation Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0606 | Savaş Uçkun | Design and Construction by Using RFID - B | 2018 Spring | Burhan Ates, Tufan Bulut, , | |||
|
Title: Design and Construction by Using RFID - B Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the student(s). The specifications of the project will be discussed with the advisor and will be decided before project starts. The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0605 | Gölge Öğücü | Indoors Navigation For Visually Impaired People | 2018 Spring | Abdulmalik A. Madigawa, Sami Alhelali, , | |||
|
Title: Indoors Navigation For Visually Impaired People Overview of the project Visually Impaired people face difficulties in transporting from one place to another independently. Most of these difficulties can be eased by the use of smartphones already available and used by most people, including visually impaired people. Indoor navigation in hospitals, airports, shopping centres, etc... will be eased This scalable in terms of the ability for using it in touristic places, or to help the visually impaired people while using the already existing outdoors navigation technologies. Approach:
Tools: Smartphone. Estimated price : None, smartphones are already available for most people. Tasks: Most of the tasks will be done as teamwork. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0604 | Arif Nacaroğlu | Fake money detector | 2018 Spring | Volkan Yilmaz, Muhammet Sait Erdogan, , | |||
|
Title: Fake money detector Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0603 | Nurdal Watsuji | Portable oscilloscope based on Arduino - B | 2018 Spring | Ceren Mete, , , | |||
|
Title: Portable oscilloscope based on Arduino - B Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0601 | Uğur Cem Hasar | Pick and Place with a 3-Axis Robot | 2018 Spring | Rabia Gunay, Zeynep Kurban, , | |||
|
Title: Pick and Place with a 3-Axis Robot Overview of the project
Division of Tasks
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0600 | Uğur Cem Hasar | Electronic Differential for Electric Cars | 2018 Fall | Murat Yildiz, Erman Odem, Oguz Arslan, Adnan Zulkadir | |||
|
Title: Electronic Differential for Electric Cars Overview of the project
Division of Tasks
Requirements
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0599 | Uğur Cem Hasar | Smart Phone Controlled Scouting Vehicle | 2018 Spring | Silan Yuzgec, Khin Maung Thein, , | |||
|
Title: Smart Phone Controlled Scouting Vehicle Overview of the project The vehicle will make surveillance of any disaster areas where human beings cannot go. When we see an injured person or an object we are searching for from camera, we can know the exact location of it from map on the smart phone screen by GPS. Function: In this project we are going to use a smart phone application software to control the vehicle which is provided by a night vision camera, Wi-Fi Shield and GPS. We will use Wi-Fi network as connection between the phone and the vehicle. The application will show the camera view, map and the control pads. Tools:
Estimated price : 700 TL Tasks: Programming and Simulation - Khin Maung Thein Circuit assembly and Wiring - Silan Yuzgec The completed project will be kept by the students to do with as they wish. |
|||||||
| 0598 | Savaş Uçkun | Design and Construction by Using RFID - A | 2018 Spring | Talha Tuzcu, , , | |||
|
Title: Design and Construction by Using RFID - A Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the student(s). The specifications of the project will be discussed with the advisor and will be decided before project starts. The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0597 | Mete Vural | Two-level Three-phase PWM Inverter Design | 2018 Spring | Lubade Muserref Temel, , , | |||
|
Title: Two-level Three-phase PWM Inverter Design Overview of the project DC to AC power conversion is required in industry, renewable energy applications, and etc. An inverter is a power electronics device that converts DC power into AC power. Two-level inverters produce two voltage levels at the output. They are cheap and easy to control when compared to multilevel topologies. In this project, a two-level three-phase pulse width modulated (PWM) inverter will be designed and practically implemented. The project will be carried out by 1 or 2 students. The attributes of this inverter are summarized as follows:
The steps of the study are summarized below:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0596 | Tolgay Kara | Energy harvesting by sun tracking solar panel | 2018 Spring | Serdar Demirci, Nuri Erdogdu, , | |||
|
Title: Energy harvesting by sun tracking solar panel Overview of the project Division of Tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0595 | Tolgay Kara | Automatic humidity-temperature control in a greenhouse | 2018 Spring | Hakki Degirmenci, Hasan Ali Cetinel, Muhammet Harun Baskaya, | |||
|
Title: Automatic humidity-temperature control in a greenhouse Overview of the project Division of Tasks:
The completed project will be donated to the department for display or lab. |
|||||||
| 0594 | Mete Vural | Boost DC/DC Converter Design | 2018 Spring | Emin Sen, Orhan Sirma, , | |||
|
Title: Boost DC/DC Converter Design Overview of the project Boost DC/DC converters are used in renewable energy applications and more. A boost converter takes a DC voltage as an input and produces a higher DC voltage at its output. In this project, a boost DC/DC converter will be practically implemented. The project will be carried out by 1 or 2 students. The attributes of this converter are summarized as follows:
The steps of the study are summarized below:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0593 | Sema Kayhan | Real-Time Detection and Tracking of Moving Targets with Color Components - 3 | 2017 Fall | Firat Yildirim, , , | |||
|
Title: Real-Time Detection and Tracking of Moving Targets with Color Components - 3 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0592 | Serkan Özbay | Design and construction of automatic orange juice extractor machine - 2 | 2017 Fall | Mehmet Fatih Kan, Anil Kirikkaya, Gokberk Otlu, | |||
|
Title: Design and construction of automatic orange juice extractor machine - 2 Overview of the project In this project, an automatic juice extractor machine used to extract liquid (juice) from orange will be designed. The machine will be controlled by a microcontrolller. The project will have software and hardware designs as well as the mechanical construction. The project will be kept by the students to do with as they wish. |
|||||||
| 0591 | Serkan Özbay | Design and construction of automatic orange juice extractor machine - 1 | 2017 Fall | Ahmet Tunc, Berkay Yalcin, Fatih Yilmazer, | |||
|
Title: Design and construction of automatic orange juice extractor machine - 1 Overview of the project In this project, an automatic juice extractor machine used to extract liquid (juice) from orange will be designed. The machine will be controlled by a microcontrolller. The project will have software and hardware designs as well as the mechanical construction. The project will be kept by the students to do with as they wish. |
|||||||
| 0590 | Sema Kayhan | Remote Control Car with Camera - 2 | 2017 Fall | Berke Salim Oldac, Baris Celik, , | |||
|
Title: Remote Control Car with Camera - 2 Overview of the project Specific components/tools:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0589 | Sema Kayhan | Remote Control Car with Camera - 1 | 2017 Fall | Sule Boz, Merve Kilincoglu, , | |||
|
Title: Remote Control Car with Camera - 1 Overview of the project Specific components/tools:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0588 | Sema Kayhan | Real-Time Detection and Tracking of Moving Targets with Color Components - 2 | 2017 Fall | Burak Akhanca, , , | |||
|
Title: Real-Time Detection and Tracking of Moving Targets with Color Components - 2 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0587 | Sema Kayhan | Real-Time Detection and Tracking of Moving Targets with Color Components - 1 | 2017 Fall | Fatma Sude Balcik, , , | |||
|
Title: Real-Time Detection and Tracking of Moving Targets with Color Components - 1 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0586 | Savaş Uçkun | VISUAL IMPAIRMENT AID FOR BLIND WITH NAVIGATION SYSTEM | 2017 Fall | Pyayt Phyo Aung, Baris Can Kablan, Can Boran Puskulluoglu, | |||
|
Title: VISUAL IMPAIRMENT AID FOR BLIND WITH NAVIGATION SYSTEM Overview of the project This device will give them a direction to go while they are walking. 3 infrared sensor for each part of shoes(in total 6 infrared sensor) will be used to measure the distance between users and obstacles around and give them a direction on which way the user should walk. The principle is so simple that it looks like a radar. Our sensor send some signals to the obstacles and upcoming signals will be sent to arduino by programming and transferred via bluetooth to android telephone.The user will be able to hear the information about the road by using earphones through telephone as we called visual impairment aid shoes. Estimated Price: 82 TL Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0585 | Mete Vural | Design of a 1.5 kV Cockroft-Walton Generator - 3 | 2017 Fall | Berna Guven, , , | |||
|
Title: Design of a 1.5 kV Cockroft-Walton Generator - 3 Overview of the project Cockcroft-Walton generator was designed by Cockcroft and Walton to generate very high DC voltages in the order of tens of thousands or even millions of volts. It is actually a modified version of the voltage doubler circuit developed by Greinacher. This generator consists of cascading combination of capacitors and diodes (rectifier) to generate a high DC voltage from a low voltage AC input. Although this generator was initially designed for particle accelerators, it is used in many area requiring high DC voltages, such as laser systems, LCD backlighting, power supplies, X-ray systems, travelling wave tubes, ion pumps, electrostatic systems, air ionizers, copy machines, oscilloscopes, and many other applications. The design stage of Cockroft-Walton generator requires selection of component ratings to cope with high voltage as well as to minimize output ripples. In this project, the student(s) will design and implement a Cockroft-Walton generator that can generate 1.5 kV DC at the output with maximum 5% of ripple. At first Matlab simulations will be performed to find the suitable rating of the components and then later experimental prototype will be prepared. The input of the generator will be fed from the secondary of a single-phase step-down transformer. The stage number, transformer rating and all other required parameters will be designed. Eventually, experimental tests will be performed both on no-load and under loading conditions. Ardunio or PIC based measurement system will also be designed to measure certain voltage/current values in the generator. student 1:
Specific components/tools:
|
|||||||
| 0584 | Serkan Özbay | Solar powered full-automated plant watering system | 2017 Fall | Ayoob Rafea Waleed, Saddirbek Saliev, , | |||
|
Title: Solar powered full-automated plant watering system Overview of the project A problem that everyone may face is how to care about their beloved plants and flowers, so as a solution to this problem a full automated plant watering system can be used that is powered by solar energy (renewable energy) and controlled by the smartphone. This project purpose is to build a completed system that can water a plant by keeping the moisture level of the plant soil in a certain healthy level and the system will be full automated means it doesn't need any human touch, so it is enough to have internet connection to water the plants using a smart application, the system will also take water by itself from the water source when the water in the system's container is finished. The most important property is that it will be solar powered and this is a big deal, so no need to be afraid if the electricity is gone for any reason. Structure of the system: The system will be made of plastic structure that will hold the hose that waters the plant , two step motors will be connected and a rail mechanism will be made so that water can move forward and backward in order to water all the soil parts. the water will be pumped with a small water pump to push the water upward, the water storage will be a small plastic container, this container will be connected to the water source and the water level sensor will be placed inside the container so it will be automatically filled when it is empty, from the water source , there will be a smart system to indicate the best suitable conditions for the plants , the whole system will be connected to a brain that is Arduino, it will control the whole system also there will be a LCD screen to show the smart system readings. An application will be made to allow the user to control the system using the mobile phone. To provide electricity for the whole system there will be an eco-friendly renewable energy that is composed of (solar panels, a charge controller, a battery and a power inverter). How this system works: Well since the system will be fully automated no need to touch any of the hardware parts to start watering , it is enough to open the app and press start the system will start watering the plant till it reaches the required conditions (using the smart system) after that point is reached, watering will stop, since each plant requires a specific soil condition to grow in, the system that includes different kinds of sensors will be set according to the suitable conditions of each plant .as a result this project will allow the user to control the watering system just by a click . Tools:
Estimated Price: 395 TL Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0583 | Mete Vural | Design of a 1 kV Cockroft-Walton Generator - 2 | 2017 Fall | Hasan Basri Alemdar, Sefa Aslan, , | |||
|
Title: Design of a 1 kV Cockroft-Walton Generator - 2 Overview of the project Cockcroft-Walton generator was designed by Cockcroft and Walton to generate very high DC voltages in the order of tens of thousands or even millions of volts. It is actually a modified version of the voltage doubler circuit developed by Greinacher. This generator consists of cascading combination of capacitors and diodes (rectifier) to generate a high DC voltage from a low voltage AC input. Although this generator was initially designed for particle accelerators, it is used in many area requiring high DC voltages, such as laser systems, LCD backlighting, power supplies, X-ray systems, travelling wave tubes, ion pumps, electrostatic systems, air ionizers, copy machines, oscilloscopes, and many other applications. The design stage of Cockroft-Walton generator requires selection of component ratings to cope with high voltage as well as to minimize output ripples. In this project, the student(s) will design and implement a Cockroft-Walton generator that can generate 1 kV DC at the output with maximum 5% of ripple. At first Matlab simulations will be performed to find the suitable rating of the components and then later experimental prototype will be prepared. The input of the generator will be fed from the secondary of a single-phase step-down transformer. The stage number, transformer rating and all other required parameters will be designed. Eventually, experimental tests will be performed both on no-load and under loading conditions. Ardunio or PIC based measurement system will also be designed to measure certain voltage/current values in the generator. student 1:
Specific components/tools:
|
|||||||
| 0582 | Mete Vural | Design of a 1 kV Cockroft-Walton Generator - 1 | 2017 Fall | Gamze Okay, Tugce Cimendag, , | |||
|
Title: Design of a 1 kV Cockroft-Walton Generator - 1 Overview of the project Cockcroft-Walton generator was designed by Cockcroft and Walton to generate very high DC voltages in the order of tens of thousands or even millions of volts. It is actually a modified version of the voltage doubler circuit developed by Greinacher. This generator consists of cascading combination of capacitors and diodes (rectifier) to generate a high DC voltage from a low voltage AC input. Although this generator was initially designed for particle accelerators, it is used in many area requiring high DC voltages, such as laser systems, LCD backlighting, power supplies, X-ray systems, travelling wave tubes, ion pumps, electrostatic systems, air ionizers, copy machines, oscilloscopes, and many other applications. The design stage of Cockroft-Walton generator requires selection of component ratings to cope with high voltage as well as to minimize output ripples. In this project, the student(s) will design and implement a Cockroft-Walton generator that can generate 1 kV DC at the output with maximum 5% of ripple. At first Matlab simulations will be performed to find the suitable rating of the components and then later experimental prototype will be prepared. The input of the generator will be fed from the secondary of a single-phase step-down transformer. The stage number, transformer rating and all other required parameters will be designed. Eventually, experimental tests will be performed both on no-load and under loading conditions. Ardunio or PIC based measurement system will also be designed to measure certain voltage/current values in the generator. student 1:
Specific components/tools:
|
|||||||
| 0581 | Taner İnce | Autonomous robotic vehicle - 2 | 2017 Fall | Alper Dogan, Mehmet Balci, , | |||
|
Title: Autonomous robotic vehicle - 2 Overview of the project Tools:
The completed project will be donated to the department for display or lab. |
|||||||
| 0580 | Taner İnce | Autonomous robotic vehicle - 1 | 2017 Fall | Ebubekir Koca, Fatih Okan Marangoz, , | |||
|
Title: Autonomous robotic vehicle - 1 Overview of the project Tools:
The completed project will be donated to the department for display or lab. |
|||||||
| 0579 | Taner İnce | Design of a Vending Machine - 2 | 2017 Fall | Emre Simsek, Mehmet Perisan, Ibrahim Yaramisli, | |||
|
Title: Design of a Vending Machine - 2 Overview of the project Division of Tasks: Tools:
The completed project will be donated to the department for display or lab. |
|||||||
| 0578 | Taner İnce | Design of a Vending Machine - 1 | 2017 Fall | Vedat Sarac, Ali Fuat Kulle, Ozkan Akdeniz, | |||
|
Title: Design of a Vending Machine - 1 Overview of the project Division of Tasks: Tools:
The completed project will be donated to the department for display or lab. |
|||||||
| 0577 | Tolgay Kara | Robotic Shopping Cart | 2017 Fall | Heba Zakri, Wafaa Sukkar, Shahd Arab, | |||
|
Title: Robotic Shopping Cart Overview of the project The purpose of this project is to implement an automatic shopping cart that provides great convenience and efficiency to customers, especially older people, which eliminates human labor to push heavy loaded carts and help customers easily locate the desired products. Our goal includes tracking the customer, avoiding collisions with obstacles. To achieve these goals, we will design each module based on our choice of microcontroller, Arduino, since it has a user friendly working platform and adequate processing speed that satisfies the need of our project. Function: Our project is able to move automatically under the drive of two DC motors, whose voltage input is controlled by Arduino to adjust moving speed. Three ultrasonic sensors are embedded in front, left and right of the cart, detecting which Path is Accessible and alarming the customer when obstacles found in a specific range. The communication between the cart and customer (tracking system) is achieved by several ways such as RFID tag chip, a camera or laser range finder. The cart receives customer's shopping list through the user interface(optional), which consists of a keypad, a LCD and a processor, then generates the shortest path covering all products selected. Our main microcontroller, Arduino, works as the information transfer and processing center. It is connected to most subcomponents and is programmed with the logic that responses to all possible situations. Optional Functions: If we had extra time we may add a system that allows the customer to add the list of the products he/she wants to buy and the LCD will tell him/her the location of each product. Tools:
Estimated Price: 520 TL + 100 TL Tasks: Software:
Hardware:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0576 | Ergun Erçelebi | Development of biomedical device for ELECTRICAL STIMULATION FOR THE TREATMENT OF PAIN AND MUSCLE REHABILITATION - 2 | 2017 Fall | Esma Kayar, Sehriban Oruc, , | |||
|
Title: Development of biomedical device for ELECTRICAL STIMULATION FOR THE TREATMENT OF PAIN AND MUSCLE REHABILITATION - 2 Overview of the project In this project, the students will design a portable device generating pulsed electromagnetic field. in fact, such a device is available in hospitals. but for therapy, patients must come to the hospital. With this device, patients will be able to do their own treatment at home without going to the hospital. Thus, saving time when the patient spends to go to the hospital and the working load of the medical staff. The students who are willing to take the project are expected to be involved in software, embedded systems, electromagnetic field theory, and 3D design. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0575 | Ergun Erçelebi | Development of biomedical device for ELECTRICAL STIMULATION FOR THE TREATMENT OF PAIN AND MUSCLE REHABILITATION - 1 | 2017 Fall | Berna Ozarslan, Zeynep Yasar, , | |||
|
Title: Development of biomedical device for ELECTRICAL STIMULATION FOR THE TREATMENT OF PAIN AND MUSCLE REHABILITATION - 1 Overview of the project In this project, the students will design a portable device generating pulsed electromagnetic field. in fact, such a device is available in hospitals. but for therapy, patients must come to the hospital. With this device, patients will be able to do their own treatment at home without going to the hospital. Thus, saving time when the patient spends to go to the hospital and the working load of the medical staff. The students who are willing to take the project are expected to be involved in software, embedded systems, electromagnetic field theory, and 3D design. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0574 | Ergun Erçelebi | Remote power monitoring system - 1 | 2017 Fall | Eyyup Eriman, Burak Yilmaz, , | |||
|
Title: Remote power monitoring system - 1 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0573 | Ergun Erçelebi | Remote power monitoring system - 2 | 2017 Fall | Mucahid Atceken, Mazhar Deniz, , | |||
|
Title: Remote power monitoring system - 2 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0572 | Ergun Erçelebi | Energy Meter Reading over Internet - 2 | 2017 Fall | Sule Demir, Ceren Takmaz, , | |||
|
Title: Energy Meter Reading over Internet - 2 Overview of the project he reading of the energy meter will also sent to a GSM modem being fed from the microcontroller via level shifter IC and RS232 link. The sim used in the modem being internet enabled transmits the data directly to a dedicated web page for display anywhere in the world in multi level graphical format. The project requires hardware and software designs. The students who are willing to take the project are expected to be involved in software and embedded systems. |
|||||||
| 0571 | Ergun Erçelebi | Energy Meter Reading over Internet - 1 | 2017 Fall | Mervan Tan, Cemre Ozturk, , | |||
|
Title: Energy Meter Reading over Internet - 1 Overview of the project he reading of the energy meter will also sent to a GSM modem being fed from the microcontroller via level shifter IC and RS232 link. The sim used in the modem being internet enabled transmits the data directly to a dedicated web page for display anywhere in the world in multi level graphical format. The project requires hardware and software designs. The students who are willing to take the project are expected to be involved in software and embedded systems. |
|||||||
| 0570 | Ergun Erçelebi | REMOTELY CONTROLLED AUTOMATIC IRRIGATION SYSTEM ON SENSING SOIL MOISTURE CONTENT - 2 | 2017 Fall | Yunus Emre Aslan, Onur Askar, , | |||
|
Title: REMOTELY CONTROLLED AUTOMATIC IRRIGATION SYSTEM ON SENSING SOIL MOISTURE CONTENT - 2 Overview of the project HARDWARE REQUIREMENTS: Microcontroller, Op amp, LCD, Relay, Water Pump, Voltage Regulator, Diodes, Capacitors, Resistors, LED, Crystal, Transistor, GSM modules. Software requirments: IAR workbench or Keil platform. Languages: C/C++ or assembly. |
|||||||
| 0569 | Ergun Erçelebi | REMOTELY CONTROLLED AUTOMATIC IRRIGATION SYSTEM ON SENSING SOIL MOISTURE CONTENT - 1 | 2017 Fall | Isa Tuten, Fatih Mehmet Ozsunar, , | |||
|
Title: REMOTELY CONTROLLED AUTOMATIC IRRIGATION SYSTEM ON SENSING SOIL MOISTURE CONTENT - 1 Overview of the project HARDWARE REQUIREMENTS: Microcontroller, Op amp, LCD, Relay, Water Pump, Voltage Regulator, Diodes, Capacitors, Resistors, LED, Crystal, Transistor, GSM modules. Software requirments: IAR workbench or Keil platform. Languages: C/C++ or assembly. |
|||||||
| 0568 | Ergun Erçelebi | Self-Switching Power Supply - 2 | 2017 Fall | Necati Sahin, , , | |||
|
Title: Self-Switching Power Supply - 2 Overview of the project
HARDWARE REQUIREMENTS:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0567 | Ergun Erçelebi | Self-Switching Power Supply - 1 | 2017 Fall | Mehmet Ali Oguz, , , | |||
|
Title: Self-Switching Power Supply - 1 Overview of the project
HARDWARE REQUIREMENTS:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0566 | Arif Nacaroğlu | Lost Item Finder - 2 | 2017 Fall | Levent Ali Bulut, Anil Duserbayilmaz, , | |||
|
Title: Lost Item Finder - 2 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0565 | Arif Nacaroğlu | Lost Item Finder - 1 | 2017 Fall | Ozge Askan, Sinem Taskiran, , | |||
|
Title: Lost Item Finder - 1 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0564 | Uğur Cem Hasar | Wireless Phone Charging System - Part II - 2 | 2017 Fall | Emre Can Ozcelik, Mehmet Emin Hoyraz, , | |||
|
Title: Wireless Phone Charging System - Part II - 2 Overview of the project
Division of Tasks
|
|||||||
| 0563 | Uğur Cem Hasar | Wireless Phone Charging System - Part II - 1 | 2017 Fall | Ertan Gulhan, Serdar Tanriverdi, , | |||
|
Title: Wireless Phone Charging System - Part II - 1 Overview of the project
Division of Tasks
|
|||||||
| 0562 | Tolgay Kara | Voice-sensitive legged rescue robot - 2 | 2017 Fall | Ozgur Yalcin, Burhan Uguz, , | |||
|
Title: Voice-sensitive legged rescue robot - 2 Overview of the project Division of Tasks:
The completed project will be donated to the department for display or lab. |
|||||||
| 0561 | Tolgay Kara | Voice-sensitive legged rescue robot - 1 | 2017 Fall | Suleyman Polat, Vedat Tas, , | |||
|
Title: Voice-sensitive legged rescue robot - 1 Overview of the project Division of Tasks:
The completed project will be donated to the department for display or lab. |
|||||||
| 0560 | Tolgay Kara | Real-time robotic hand control using simple hand gestures - 2 | 2017 Fall | Fatih Aydin, Ridvan Uregen, Zeki Ucpinar, | |||
|
Title: Real-time robotic hand control using simple hand gestures - 2 Overview of the project Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0559 | Tolgay Kara | Real-time robotic hand control using simple hand gestures - 1 | 2017 Fall | Besir Kilic, Ferhat Isiker, , | |||
|
Title: Real-time robotic hand control using simple hand gestures - 1 Overview of the project Division of Tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0558 | Arif Nacaroğlu | Electromagnetic Bullet Accelerator - 2 | 2017 Fall | á¯brahim Topalbekiroglu, Orhan Oguz, , | |||
|
Title: Electromagnetic Bullet Accelerator - 2 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0557 | Arif Nacaroğlu | Electromagnetic Bullet Accelerator - 1 | 2017 Fall | Mucahit Izginli, Sefa Oral, , | |||
|
Title: Electromagnetic Bullet Accelerator - 1 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0556 | Arif Nacaroğlu | Sleep Apnea detector - 2 | 2017 Fall | Sonay Yakar, Kubra Temlik, , | |||
|
Title: Sleep Apnea detector - 2 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0555 | Arif Nacaroğlu | Sleep Apnea detector - 1 | 2017 Fall | Taha Yasin Kasa, Onur Midyatli, , | |||
|
Title: Sleep Apnea detector - 1 Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0554 | Savaş Uçkun | Design and Construction by Using RFID - 2 | 2017 Fall | Hasan Onur Atac, , , | |||
|
Title: Design and Construction by Using RFID - 2 Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the student(s). The specifications of the project will be discussed with the advisor and will be decided before project starts. The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0553 | Uğur Cem Hasar | Design of a new type electromagnetic absorber - Metamaterial absorber - 2 | 2017 Fall | Yunus Emre Esen, Mustafa Buyukkomurcu, , | |||
|
Title: Design of a new type electromagnetic absorber - Metamaterial absorber - 2 Overview of the project Metamaterials (MMs) are engineered materials with unit cells designed in periodic and appropriate manner so that they produce extraordinary electromagnetic properties which could not be attained by ordinary materials. MM absorbers are a new type electromagnetic absorbers designed by MM structures which could absorb electromagnetic signals. Project goal is to design, simulate, fabricate, and implement a suitable MM absorber according to some criteria. Students could learn designing this new type of MM absorber, have a chance to incorporate electromagnetic theory with simulations, and fabricate the MM absorber he/she designed, and finally measure electromagnetic response of the designed MM absorber via a real portable vector network analyzer.
Division of Tasks
The project will be kept by the supervisor for further use. |
|||||||
| 0552 | Mete Vural | Design of a DC-DC Buck Converter - 2 | 2017 Fall | Aynur Tuba Cakmak, Fatma Nur Celik, Muhammed Faruk Isiker, | |||
|
Title: Design of a DC-DC Buck Converter - 2 Overview of the project It is usually required to step-down a DC voltage to a lower value in many applications. In this project, a DC-DC buck converter (step-down converter) will be designed. Ardunio or any type of microcontroller can be used in the project. The PWM ouput of the microcontroller will be used to drive the MOSFET semiconductor. It is expected that the output of the converter can be controlled in the range of 0-5 V from a fixed 5V DC supply by varying the duty cycle of PWM pulses. The following components can be used for a preliminary design that can be altered/modified by the team:
The project consists of three stages: Stage-A (Simulation of the DC-DC buck converter): In this stage, the simulation model of the DC-DC buck converter will be built in Matlab. The simulation results will give an idea to choose or verify component type/rating for hardware design. In the simulation, first, the duty cycle will be changed in the range of 0-100% to vary the output voltage of the converter (load voltage). This stage will be a preliminary work for Stage-B. Secondly, a closed-loop control (P-control) will be added to the simulation model to control the output voltage (load voltage) in closed-loop conditions. This stage will be a preliminary work for Stage-C. This means that a reference voltage in the range of 0-5V is given and the output voltage of the converter will be observed together with the dynamic performance of the closed-loop control. Stage-B (Open-loop control of the DC-DC buck converter): Depending on the results obtained from stage-A, the hardware of the DC-DC buck converter will be implemented in this stage. To decrease cost, load current in the range of 0-1A can be considered. After completion of the hardware, open-loop control will be done as described in stage-A. This means that the duty cycle will be changed manually (in the microcontroller code) in the range of 0-100% to vary the load voltage in the range (0-5V). The load voltage will be read from LED display. Many case studies will be performed to verify the design. Stage-C (Closed-loop control of the DC-DC buck converter): Closed-loop control will be designed and added to the hardware design in this stage. In the closed-loop control, the reference value of the output voltage of the converter will be manually entered into the microcontroller code. Then the measured output voltage will be compared (after passing through the low-pass RC filter) with this reference to modify the duty cycle of the MOSFET. The reference and the measured values of the output voltage of the DC-DC converter will be both read from LED display. Many case studies will be performed to verify the design. Organization of the work: Stage-A: Student #1 Stage-B: Student #2 Stage-C: Student #3
The completed project will be kept by the students to do as they wish. |
|||||||
| 0551 | Tolgay Kara | Experimental PID design and tuning for a liquid level control problem - 2 | 2017 Fall | Ali Nail Arcdic, Mehmet Cengiz, , | |||
|
Title: Experimental PID design and tuning for a liquid level control problem - 2 Overview of the project Division of Tasks:
Mathematical modeling, control design and tests are common tasks. The completed project will be kept by the supervisor for further use. |
|||||||
| 0550 | Arif Nacaroğlu | Stick balancer | 2017 Spring | Hamit Simsek, Abdulsamed Akbas, , | |||
|
Title: Stick balancer Overview of the project Division of Tasks:
Tools:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0549 | Arif Nacaroğlu | Unshootable Woman | 2017 Spring | Abdullah Hamawiya, Gercek Cetinkaya, , | |||
|
Title: Unshootable Woman Overview of the project Division of Tasks:
Tools:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0548 | Taner İnce | Obstacle avoiding robotic vehicle | 2017 Spring | Canan Yamakoglu, Tutku Uzun, , | |||
|
Title: Obstacle avoiding robotic vehicle Overview of the project Division of Tasks: Tools:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0547 | Uğur Cem Hasar | Design of a new type electromagnetic absorber - Metamaterial absorber - 1 | 2017 Fall | Suat Binici, Burak Korkmaz, , | |||
|
Title: Design of a new type electromagnetic absorber - Metamaterial absorber - 1 Overview of the project Metamaterials (MMs) are engineered materials with unit cells designed in periodic and appropriate manner so that they produce extraordinary electromagnetic properties which could not be attained by ordinary materials. MM absorbers are a new type electromagnetic absorbers designed by MM structures which could absorb electromagnetic signals. Project goal is to design, simulate, fabricate, and implement a suitable MM absorber according to some criteria. Students could learn designing this new type of MM absorber, have a chance to incorporate electromagnetic theory with simulations, and fabricate the MM absorber he/she designed, and finally measure electromagnetic response of the designed MM absorber via a real portable vector network analyzer.
Division of Tasks
The project will be kept by the supervisor for further use. |
|||||||
| 0546 | Uğur Cem Hasar | Wireless Phone Charging System | 2017 Spring | Mustafa Yuksek, Yusuf Korkmaz, , | |||
|
Title: Wireless Phone Charging System Overview of the project
Division of Tasks
The project will be kept by the supervisor for further use. |
|||||||
| 0545 | Nuran Doğru | 3D Foot Laser Scanner | 2017 Spring | Jakhongir Mamadov, Kamil Mustafa Ozturk, Bilal Sanverdi, | |||
|
Title: 3D Foot Laser Scanner Overview of the project The project will be kept by the students to do with as they wish. |
|||||||
| 0544 | Mete Vural | Design of a DC-DC Buck Converter - 1 | 2017 Fall | Vakkas Yildirim, Adem Dogan, Adem Yalcin, | |||
|
Title: Design of a DC-DC Buck Converter - 1 Overview of the project It is usually required to step-down a DC voltage to a lower value in many applications. In this project, a DC-DC buck converter (step-down converter) will be designed. Ardunio or any type of microcontroller can be used in the project. The PWM ouput of the microcontroller will be used to drive the MOSFET semiconductor. It is expected that the output of the converter can be controlled in the range of 0-5 V from a fixed 5V DC supply by varying the duty cycle of PWM pulses. The following components can be used for a preliminary design that can be altered/modified by the team:
The project consists of three stages: Stage-A (Simulation of the DC-DC buck converter): In this stage, the simulation model of the DC-DC buck converter will be built in Matlab. The simulation results will give an idea to choose or verify component type/rating for hardware design. In the simulation, first, the duty cycle will be changed in the range of 0-100% to vary the output voltage of the converter (load voltage). This stage will be a preliminary work for Stage-B. Secondly, a closed-loop control (P-control) will be added to the simulation model to control the output voltage (load voltage) in closed-loop conditions. This stage will be a preliminary work for Stage-C. This means that a reference voltage in the range of 0-5V is given and the output voltage of the converter will be observed together with the dynamic performance of the closed-loop control. Stage-B (Open-loop control of the DC-DC buck converter): Depending on the results obtained from stage-A, the hardware of the DC-DC buck converter will be implemented in this stage. To decrease cost, load current in the range of 0-1A can be considered. After completion of the hardware, open-loop control will be done as described in stage-A. This means that the duty cycle will be changed manually (in the microcontroller code) in the range of 0-100% to vary the load voltage in the range (0-5V). The load voltage will be read from LED display. Many case studies will be performed to verify the design. Stage-C (Closed-loop control of the DC-DC buck converter): Closed-loop control will be designed and added to the hardware design in this stage. In the closed-loop control, the reference value of the output voltage of the converter will be manually entered into the microcontroller code. Then the measured output voltage will be compared (after passing through the low-pass RC filter) with this reference to modify the duty cycle of the MOSFET. The reference and the measured values of the output voltage of the DC-DC converter will be both read from LED display. Many case studies will be performed to verify the design. Organization of the work: Stage-A: Student #1 Stage-B: Student #2 Stage-C: Student #3
The completed project will be kept by the students to do as they wish. |
|||||||
| 0543 | Serkan Özbay | Mobile phone signal jammer | 2017 Spring | Sezai Erdal, , , | |||
|
Title: Mobile phone signal jammer Overview of the project The purpose of the project is to design and construct signal disrupting device to jam a cell phone signal in a designated area. The project will be kept by the students to do with as they wish. |
|||||||
| 0542 | Serkan Özbay | Rapid Eye Movement (REM) Sleep Detection and Alarm Clock Design | 2017 Spring | Mustafa Okul, Eyup Dag, Emre Cokay, | |||
|
Title: Rapid Eye Movement (REM) Sleep Detection and Alarm Clock Design Overview of the project The purpose of the project is to track user's sleep patterns and then to design a system that wakes the user up on the right time (during light sleep). Normal alarm clocks wake the users up at a fixed time, mostly in their deep sleep. In this system design, the alarm will activate during the ideal stage of sleep allowing the user to awaken refreshed. The project will be kept by the students to do with as they wish. |
|||||||
| 0541 | Savaş Uçkun | Design and Construction by Using RFID - 1 | 2017 Fall | Cem Kiray, , , | |||
|
Title: Design and Construction by Using RFID - 1 Overview of the project In this project the RFID and applications will be searched and a design and construction project will be sugested by the student(s). The specifications of the project will be discussed with the advisor and will be decided before project starts. The completed project will be kept by the students to do with as they wish or donated to the department for display or lab. |
|||||||
| 0538 | Ergun Erçelebi | Improvement on Development of Electronic Card for Home Automation | 2017 Spring | Hakki Akyuz, Berkay Erten, , | |||
|
Title: Improvement on Development of Electronic Card for Home Automation Overview of the project The completed project will be kept kept by the students to do with as they wish. The completed project will be donated to the department for display or lab. |
|||||||
| 0537 | Ergun Erçelebi | Development of multifunctional wearable clock | 2017 Spring | Okkes Alacam, Ali Can Kel, , | |||
|
Title: Development of multifunctional wearable clock Overview of the project The completed project will be kept kept by the students to do with as they wish. The completed project will be donated to the department for display or lab. |
|||||||
| 0536 | Ergun Erçelebi | Development of Kid in Car Reminder | 2017 Spring | Selami Sahin, Ahmet Tas, , | |||
|
Title: Development of Kid in Car Reminder Overview of the project The completed project will be kept kept by the students to do with as they wish. The completed project will be donated to the department for display or lab. |
|||||||
| 0535 | Ergun Erçelebi | Development of Desktop information system | 2017 Spring | Seher ManavcáÝ, , , | |||
|
Title: Development of Desktop information system Overview of the project The completed project will be kept kept by the students to do with as they wish. The completed project will be donated to the department for display or lab. |
|||||||
| 0534 | Ergun Erçelebi | Improvoment on development of breast milk pump | 2017 Spring | Cigdem ImáÝs, Zehra Yelen, , | |||
|
Title: Improvoment on development of breast milk pump Overview of the project The completed project will be kept kept by the students to do with as they wish. The completed project will be donated to the department for display or lab. |
|||||||
| 0533 | Ergun Erçelebi | Improvement On Development of Blood Pressure Meter | 2017 Spring | Joseph Gicumbi, Jouman Hajjar, , | |||
|
Title: Improvement On Development of Blood Pressure Meter Overview of the project The completed project will be kept kept by the students to do with as they wish. The completed project will be donated to the department for display or lab. |
|||||||
| 0532 | Ergun Erçelebi | Improvement on Development of Electronic Card for Power Management | 2017 Spring | Ibrahim Kizilcinar, Edip Mert Canbolat, , | |||
|
Title: Improvement on Development of Electronic Card for Power Management Overview of the project The completed project will be kept kept by the students to do with as they wish. |
|||||||
| 0531 | Gölge Öğücü | Solar Home Infrastructure | 2017 Spring | Okan Dinc, Ahmet Erdogan Bugdayci, , | |||
|
Title: Solar Home Infrastructure Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0530 | Gölge Öğücü | Finger Mouse | 2017 Spring | Ibrahim Ucel, Hamza Demirci, Ibrahim Okur, | |||
|
Title: Finger Mouse Overview of the project
Division of tasks: The project has two tasks to be completed:
The completed project will be donated to the department for display or lab. |
|||||||
| 0529 | Nurdal Watsuji | Pulse Meter with Voice Warning System | 2017 Spring | Cemalettin Oztoprak, , , | |||
|
Title: Pulse Meter with Voice Warning System Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0528 | Tolgay Kara | Color sensitive autonomous mobile robot | 2017 Spring | Anil Atilgan, Yasin Kara, , | |||
|
Title: Color sensitive autonomous mobile robot Overview of the project Division of Tasks:
Robot design, control and tests are common tasks. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0527 | Tolgay Kara | Cascade control of a double tank liquid level process | 2017 Spring | Aslihan Kucukkilinc, Nazan Ozturk, Nursen á¯sik, | |||
|
Title: Cascade control of a double tank liquid level process Overview of the project Division of Tasks:
Mathematical modeling, control design and tests are common tasks. The completed project will be kept by the supervisor for further use. |
|||||||
| 0526 | Tolgay Kara | Experimental PID design and tuning for a liquid level control problem - 1 | 2017 Fall | Ahmet Hacihasanoglu, Erbil Esen, , | |||
|
Title: Experimental PID design and tuning for a liquid level control problem - 1 Overview of the project Division of Tasks:
Mathematical modeling, control design and tests are common tasks. The completed project will be kept by the supervisor for further use. |
|||||||
| 0525 | Nurdal Watsuji | Traffic signal system of a 4-way junction based on density (II) | 2016 Fall | Mohamed Nezhat Kaddour, Noura Idris, Muntaser Arab, | |||
|
Title: Traffic signal system of a 4-way junction based on density (II) Overview of the project Tools: IR sensors and microcontroller. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0524 | Gölge Öğücü | An autonomic robot [XII] | 2016 Fall | Mahmut Kaan Kucukoglu, Mesut Gumus, , | |||
|
Title: An autonomic robot [XII] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0523 | Gölge Öğücü | An autonomic robot [XI] | 2016 Fall | Nurdagul Basak, Ahmet Karagoz, Burcu Bakim, | |||
|
Title: An autonomic robot [XI] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0522 | Gölge Öğücü | An autonomic robot [X] | 2016 Fall | Meryem Camuz, Zekeriya Sarikol, Mehmet Meki Cabuk, | |||
|
Title: An autonomic robot [X] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0521 | Gölge Öğücü | An autonomic robot [IX] | 2016 Fall | Onur Yildiz, Mehmet Efe Karabulut, Oguz Kaan Karadag, | |||
|
Title: An autonomic robot [IX] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0520 | Savaş Uçkun | An autonomic robot [VIII] | 2016 Fall | Sadik Delioglu, Suleyman Ali Aydin, Komi Spero Hegbe, | |||
|
Title: An autonomic robot [VIII] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0519 | Savaş Uçkun | An autonomic robot [VII] | 2016 Fall | Semsettin Karakus, Omer Aslan, Yusuf Kilinc, | |||
|
Title: An autonomic robot [VII] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0518 | Savaş Uçkun | An autonomic robot [VI] | 2016 Fall | Zaw Htet Aung, Rahsan Goksu, Veysel Celikturk, | |||
|
Title: An autonomic robot [VI] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0517 | Savaş Uçkun | An autonomic robot [V] | 2016 Fall | Yusuf Aras, Alican Cetin, Ahmet Serkan Pelit, | |||
|
Title: An autonomic robot [V] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0516 | Arif Nacaroğlu | An autonomic robot [IV] | 2016 Fall | Huseyin Ozay, Nesrin Tekin, Hasan Huseyin Sahin, | |||
|
Title: An autonomic robot [IV] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0515 | Arif Nacaroğlu | An autonomic robot [III] | 2016 Fall | Ali Fuat Atay, Mehmet Bostanci, Kerim Akgun, | |||
|
Title: An autonomic robot [III] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0514 | Arif Nacaroğlu | An autonomic robot [II] | 2016 Fall | Goktug Zulkadir, Burak Yarar, Mehmet Dogan, | |||
|
Title: An autonomic robot [II] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0513 | Arif Nacaroğlu | An autonomic robot [I] | 2016 Fall | Yousf Alkhudairy, Abdulrahman Alshaikhli, Mehmet Baydar, | |||
|
Title: An autonomic robot [I] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0512 | Nuran Doğru | Remote Controlled Robotic Arm | 2016 Fall | Volkan Guler, Hasan Eroglu, Huseyin Bayca, | |||
|
Title: Remote Controlled Robotic Arm Overview of the project 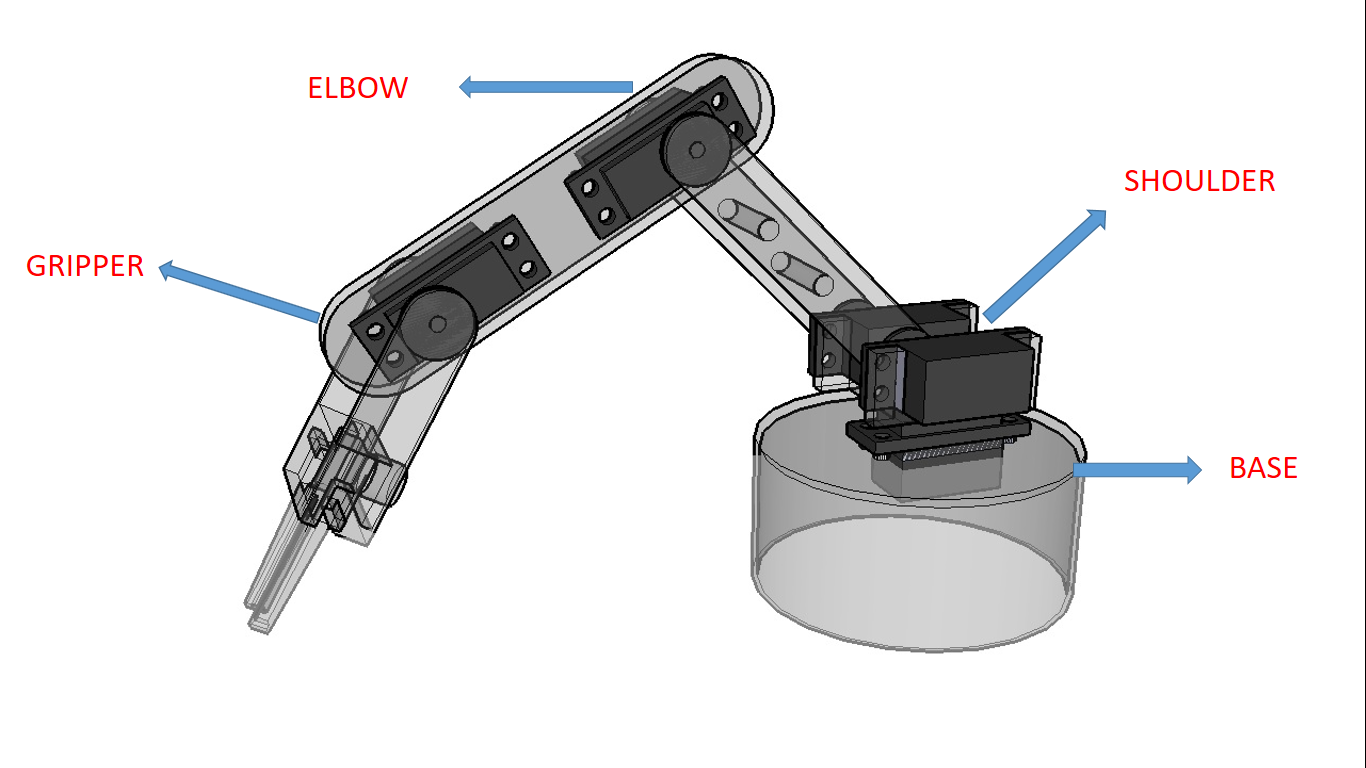 Specific components/Tools:
Estimated Budget: 300-350 TL |
|||||||
| 0511 | Uğur Cem Hasar | Design and control of a Hovercraft with a Remote Controller and a Camera | 2016 Fall | M. Ali Karasurmeli, Elif Kavus, , | |||
|
Title: Design and control of a Hovercraft with a Remote Controller and a Camera Overview of the project 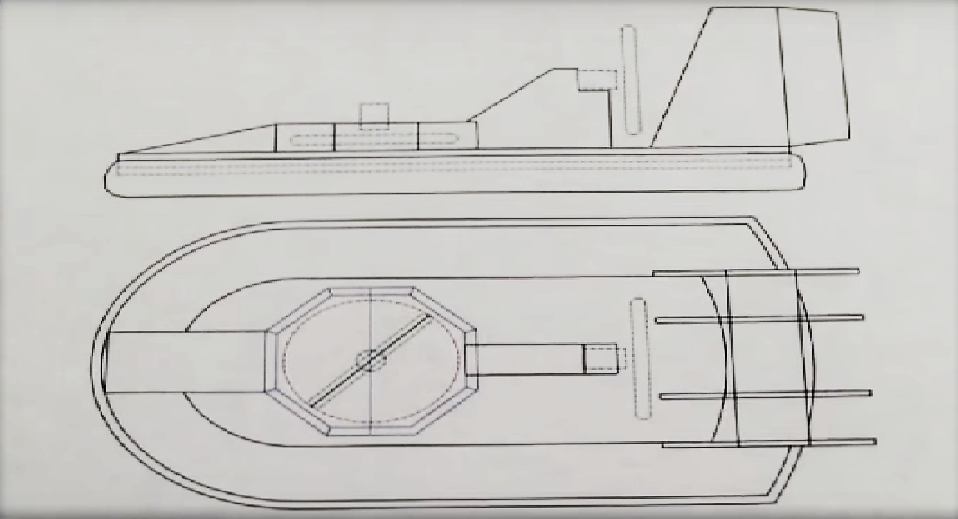
Division of Tasks
Specific components/Tools
Estimated Budget: 850 TL |
|||||||
| 0510 | Uğur Cem Hasar | Automatic Parking Robot | 2016 Fall | Coskun Deli, Yaprak Kapucu, , | |||
|
Title: Automatic Parking Robot Overview of the project
Division of Tasks
Specific components/Tools
Estimated Budget: 350-450 TL |
|||||||
| 0509 | Nurdal Watsuji | Traffic signal system of a 4-way junction based on density (I) | 2016 Fall | Abdullah Alan, Muzaffer Sur, Nadir Akbulut, | |||
|
Title: Traffic signal system of a 4-way junction based on density (I) Overview of the project Tools: IR sensors and microcontroller. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0508 | Mete Vural | Web Based Data Acquisition for Photovoltaic Power System | 2016 Fall | Velican Ulusoy, Ismail HakkáÝ Cengiz, , | |||
|
Title: Web Based Data Acquisition for Photovoltaic Power System Overview of the project Division of tasks:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0507 | Mete Vural | Arduino Based Power Factor Calculator | 2016 Fall | Omer Kircali, Ibrahim Yilmaz, , | |||
|
Title: Arduino Based Power Factor Calculator Overview of the project Division of tasks:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0506 | Sema Kayhan | Recognition of brand and type of vehicle using image processing | 2016 Fall | Elif Erin, , , | |||
|
Title: Recognition of brand and type of vehicle using image processing Overview of the project
Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0505 | Sema Kayhan | Voice Controlled Wheelchair | 2016 Fall | Ayse Nur Killi, Taylan Usuk, , | |||
|
Title: Voice Controlled Wheelchair Overview of the project Divison of Tasks: To be determined in the first meeting.
Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0504 | Serkan Özbay | Solar Tracking System | 2016 Fall | Abdulkadir Onur Cavas, Ismail Akay, , | |||
|
Title: Solar Tracking System Overview of the project Most of the project work is the construction of the mechanical system but it also involves a control system. There are motors, a circuit board, LDR and circuit elements in the mechanical system. Amount of the light received by the circuit(LDR) determines the movement of the system (right, left, up and down).
Specific components/tools
Estimated Budget: 300 TL |
|||||||
| 0503 | Ergun Erçelebi | Remote Irrigation System with GSM and Ethernet | 2016 Fall | Ahmet Lutfi Kilinc, Onder Cicek, Musa Dagdeviren, | |||
|
Title: Remote Irrigation System with GSM and Ethernet Overview of the project
Specific components/tools
|
|||||||
| 0502 | Mete Vural | Remote controlling electrical snowplow car with camera (ROBOPLOW) | 2016 Fall | Yigit Demirci, Melih Kocar, , | |||
|
Title: Remote controlling electrical snowplow car with camera (ROBOPLOW) Overview of the project The car consists of 4 durable wheels (which is suitable for winter conditions), a movable shovel in front of the car, a camera system and leds which can operate at both daytime and night conditions. The following video will help you understand the project: Life is easier with ROBOPLOW.
Division of Tasks
Specific components/Tools
Estimated Budget: 350 TL |
|||||||
| 0500 | Rauf Mirzababayev | Device to measure athmospheric pressure ,humidity and temperature | 2016 Fall | Muslum Yildirim, Selman Seven, , | |||
|
Title: Device to measure athmospheric pressure ,humidity and temperature Overview of the project
After preparing the overall design together, one student will build a system to obtain the analog signal from the sensors, the second student will build a system to process and digitize the signal so that it can be displayed on a screen. Estimated Budget: 230-250 TL |
|||||||
| 0499 | Serkan Özbay | Automated lecture attendance system based on face recognition | 2016 Fall | Abdulbaki Alas, Sercan Algul, , | |||
|
Title: Automated lecture attendance system based on face recognition Overview of the project The completed project will be kept by the students to do as they wish. |
|||||||
| 0498 | Mete Vural | Small Prototype DC Microgrid | 2016 Fall | Kemal Cetinkaya, Emrah Hakverdi, Ozkan Erdem, | |||
|
Title: Small Prototype DC Microgrid Overview of the project
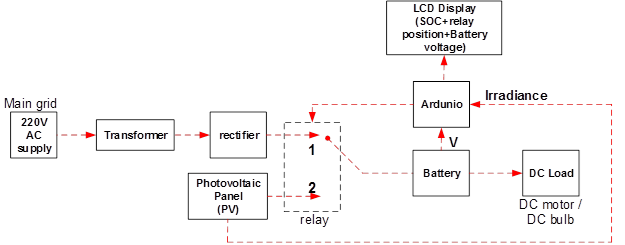 Division of tasks:
The completed project will be kept by the supervisor for further use.. |
|||||||
| 0497 | Serkan Özbay | Lecture attendance system based on fingerprint recognition | 2016 Fall | Recep Kubilay Kuyumcu, Onur Pekmezci, Ozcan Oruc, | |||
|
Title: Lecture attendance system based on fingerprint recognition Overview of the project The completed project will be kept by the students to do as they wish. |
|||||||
| 0496 | Serkan Özbay | Lecture attendance system based on face recognition | 2016 Fall | Pelin Coklar, Cansu Akdogan, , | |||
|
Title: Lecture attendance system based on face recognition Overview of the project The completed project will be kept by the students to do as they wish. |
|||||||
| 0495 | Nurdal Watsuji | Car Parking Project | 2016 Fall | Zehra Camdali, Nuri Kose, Mustafa Taskin Altun, | |||
|
Title: Car Parking Project Overview of the project When there is no empty space then at the outside LED will be red. The sensor will be deactive and will not see even if the vehicle comes close to barrier.So the barrier wonãt open and the vehicle can be leave without losing time.The situation of the park also will be seen at the entrance of the park by the counter.It will show number of empty space. If there is one or more space then at the outside LED will be green this time.Now the sensor will be active and when vehicle come close to the barrier it will open automatically.Since the car enter inside the driver will see the floor parking plan where is/are the empty space on the display.The sensors will detect the vehicle while parking and it will send a signal to floor parking plan to show its place full now and it will indicate by red.Alsa by entering a vehicle from barrier, a signal will send to counter for show the empty place one more decreased.If by this decrease the parking area is totally full then one signal will be send to at the outside LED to be red color.At the same time when a car leaves the parking area then the sensor will detect the car and it will send a signal to the display at the floor parking plan as empty.Maybe the vehicle does not leave the park it may parking another place.In this case it will be seen at the floor parking plan when it parking somewhere.But it will not change the at the outside LED and the counter.It is only shown in LCD display.Because the vehicle does not leave the area. Once the car leaves the parking area it will come close to barrier and at the outbarrier sensor will see this vehicle and the barrier will open automatically.By leaving the area,parking area will has one more empty place then one more car can be enter the parking area.It will be seen at the counter as one more empty place increased.
Specific components/Tools:
Estimated Budget: 300 TL |
|||||||
| 0494 | Ergun Erçelebi | Development of Touch screen based Home Appliance Control System using Wireless Communication (II) | 2016 Fall | Fatih Cicekoglu, Ibrahim Cihat Uyanik, , | |||
|
Title: Development of Touch screen based Home Appliance Control System using Wireless Communication (II) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0493 | Nurdal Watsuji | Four channel colour sorting | 2016 Fall | Elif Picak, Furkan Sari, Ali Sagaltici, | |||
|
Title: Four channel colour sorting Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0492 | Taner İnce | Distance measurement by ultrasonic sensors | 2016 Fall | Mehmet Sahin Aycicek, Mucahit Baytekin, , | |||
|
Title: Distance measurement by ultrasonic sensors Overview of the project Division of Tasks: Consult to your supervisor. Tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0491 | Taner İnce | Car parking system using RFID | 2016 Fall | Omer Tasdemir, Fatih Cakar, Abdullah Sukru Bas, | |||
|
Title: Car parking system using RFID Overview of the project Division of Tasks: Consult to your supervisor. Tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0490 | Taner İnce | Fingerprint authentication system based door lock | 2016 Fall | Akin Gunduz, Nursah Polat, , | |||
|
Title: Fingerprint authentication system based door lock Overview of the project Division of Tasks: Consult to your supervisor. Tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0489 | Taner İnce | Automatic car over speed detection system | 2016 Fall | Mustafa Turkmen, Engin Ozturkcan, Gizem Erguzel, | |||
|
Title: Automatic car over speed detection system Overview of the project Division of Tasks: Consult to your supervisor. Tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0488 | Nuran Doğru | 3D Foot Laser Scanner | 2016 Fall | Yildiray Parla, Ugur Okmen, Melisa Karakus, | |||
|
Title: 3D Foot Laser Scanner Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0487 | Nuran Doğru | Laser Cutter | 2016 Fall | Atalay Tahir Ciger, Fatih Tokgoz, , | |||
|
Title: Laser Cutter Overview of the project WARNING: very DANGEROUS project
Please be careful! The completed project will be kept by the student to do with as they wish. |
|||||||
| 0486 | Tolgay Kara | Automatic Prosthetic Arm | 2016 Fall | Gokhan Arslan, Sinan Cetin, Alp Berkan Akinli, | |||
|
Title: Automatic Prosthetic Arm Overview of the project Division of tasks:
Specific components/Tools:
Estimated Budget: 880 TL |
|||||||
| 0485 | Tolgay Kara | Test stand for attitude control of quadcopters | 2016 Fall | Muhammed Ayrilmak, Taylan Unnu, Ersin Kilic, | |||
|
Title: Test stand for attitude control of quadcopters Overview of the project Division of Tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0484 | Tolgay Kara | Haptic warning system for the deaf | 2016 Fall | Murat Kucuk, Emrah Eryilmaz, , | |||
|
Title: Haptic warning system for the deaf Overview of the project Division of Tasks: Consult your supervisor for the division of tasks. The completed project will be kept by the students to do as they wish. |
|||||||
| 0483 | Rauf Mirzababayev | Device for a pipeline freezing prevention in a winter time of an outdoor water heaters | 2016 Fall | Enes Solak, Omer Yasar Soyturk, , | |||
|
Title: Device for a pipeline freezing prevention in a winter time of an outdoor water heaters Overview of the project The completed project will be kept by the students to do as they wish. |
|||||||
| 0482 | Rauf Mirzababayev | Electronic belly massage device | 2016 Fall | Rojhat Kara, Yakup Aglamis, , | |||
|
Title: Electronic belly massage device Overview of the project The completed project will be kept by the students to do as they wish. |
|||||||
| 0481 | Rauf Mirzababayev | Electronic barometer (Weather prediction) | 2016 Fall | Furkan Demir, Hasan Memis, , | |||
|
Title: Electronic barometer (Weather prediction) Overview of the project The completed project will be kept by the students to do as they wish. |
|||||||
| 0480 | Ergun Erçelebi | Development of Touch screen based Home Appliance Control System using Wireless Communication (I) | 2016 Fall | Ahmad Abdulkarim, , , | |||
|
Title: Development of Touch screen based Home Appliance Control System using Wireless Communication (I) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0479 | Ergun Erçelebi | Development of LED Lighting Driver Circuit | 2016 Fall | Mehmet Korkmaz, Kemal Cagdas Metin, , | |||
|
Title: Development of LED Lighting Driver Circuit Overview of the project
The completed project will be kept by the supervisor for further use. |
|||||||
| 0478 | Ergun Erçelebi | Development of Breast Milk Pump | 2016 Fall | Meltem Ercin, Ozge Cagirtekin, , | |||
|
Title: Development of Breast Milk Pump Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0477 | Ergun Erçelebi | Development of Blood Pressure Meter | 2016 Fall | Ferhat Kılıç, Fırat Işık, , | |||
|
Title: Development of Blood Pressure Meter Overview of the project
The completed project will be kept by the supervisor for further use. |
|||||||
| 0476 | Ergun Erçelebi | Development of Electronic Card for Home Automation | 2016 Fall | Omer Kokten, Tolga Yilmaz, , | |||
|
Title: Development of Electronic Card for Home Automation Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0475 | Ergun Erçelebi | Development of Electronic Card for Power Management | 2016 Fall | Jelil Orazmyradov, Guly Amangulyyev, , | |||
|
Title: Development of Electronic Card for Power Management Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0474 | Uğur Cem Hasar | Animatronic Hand | 2016 Spring | Sukru Unsal Urunver, Zeynep Karakus, , | |||
|
Title: Animatronic Hand Overview of the project Students are expected to complete the project with a working design. Tools:
|
|||||||
| 0473 | Uğur Cem Hasar | Analysis and Design of Multilayer Rugate Filters | 2016 Spring | Nevzat Ayan, , , | |||
|
Title: Analysis and Design of Multilayer Rugate Filters Overview of the project The purpose of the project is to learn basic properties of these filters (i.e., having low level side lobes after apodization) and then write a Matlab program to investigate to analyze the effect of layer thickness or layer refractive index on the electromagnetic properties of these filters.
Tools:
|
|||||||
| 0472 | Uğur Cem Hasar | Fire Extinguisher by Ultra-Sound Waves | 2016 Fall | Ibrahim Sinan Atas, Neytullah Arslan, , | |||
|
Title: Fire Extinguisher by Ultra-Sound Waves Overview of the project Division of Tasks:
|
|||||||
| 0471 | Nurdal Watsuji | Person-following robot | 2016 Spring | Mustafa Avci, Ali Erdogan, Aytac Arslan, | |||
|
Title: Person-following robot Overview of the project The three students will decide on the overall design, and then appropriate division of tasks. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0470 | Ahmet Uçar | Position Control of a Permanent Magnet DC Motor by the frequency response method. | 2016 Fall | Nazim Abdullah Guler, Abdussamet Kiymik, Baris Er, | |||
|
Title: Position Control of a Permanent Magnet DC Motor by the frequency response method. Overview of the project Once the construction phase is completed the parameters of the motor and characteristic of the feedback components shown in Figure 1 will be obtained. The example given in MATLAB/Simulink control toolboxes can be used as a benchmark problem to have more information.
To design the controller, first the desired frequency response behaviour of the closed loop system
needs to be determined. The simplest and suitable controller characteristic will be determined and
its parameters will be designed by using Bode diagram.
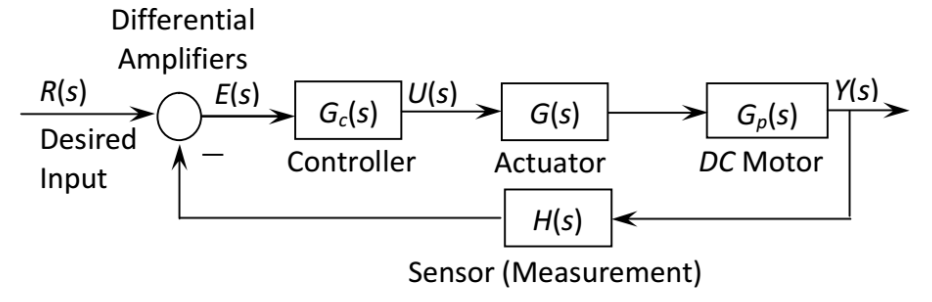 Division of Tasks: Construction section; The set in EEE-352 Automatic Control Systems laboratory known DIGIAC 1750 DC can be used as benchmark example. Then construct each components of the feedback system determined in Figure 1. Design Section;
Apparatus/Tools prerequisite: EEE 352 Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project left to students; either keep it for them or leave it in EEE-352 laboratory to be used by others. |
|||||||
| 0469 | Tolgay Kara | 2-DOF position control of a simplified helicopter model | 2016 Spring | Ozhan Dokumaci, Onurcan Kaymak, Salih Gokkaya, | |||
|
Title: 2-DOF position control of a simplified helicopter model Overview of the project Division of Tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0468 | Ahmet Uçar | Position Control of a Permanent Magnet DC Motor by root locus method | 2016 Fall | Sinem Basar, Tolga Soyak, , | |||
|
Title: Position Control of a Permanent Magnet DC Motor by root locus method Overview of the project The project consists of design and construction. The construction phase has to be sated first and the parameters of the motor and characteristic of the feedback blocks shown in Figure 1 will be measured and obtained. One of important part of the feedback is the potentiometer. It has to measure the position in continuous time. To design the controller, first the desired time response behaviour of the closed loop system will be selected. Then the simplest and suitable controller characteristic will be determined and its parameters will be designed.
Division of Tasks:
MS15 DC motor control module in EEE-352 Automatic Control Systems laboratory can be used as benchmark example. Then construct each components of the feedback system determined in Figure 1. Design section;
Apparatus/Tools prerequisite: EEE 352 Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student.
The completed project left to students; either keep it for them or leave it in EEE-352 laboratory to
be used by others.
|
|||||||
| 0467 | Nuran Doğru | Design and implementation of FPGA based object tracking algorithm | 2016 Spring | Ahmet Enes Gormez, Said Nur Vurgun, Ahmet Unge, | |||
|
Title: Design and implementation of FPGA based object tracking algorithm Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0466 | Savaş Uçkun | Design and construction based on RFID | 2016 Spring | Hasan Taylan Tataroglu, , , | |||
|
Title: Design and construction based on RFID Overview of the project In this project the RFID and applications will be searched and a design and construction project will be suggested by the student. The specifications of the project will be discussed with the advisor and will be decided before project starts. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0465 | Sema Kayhan | Bluetooth Controlled Electronic Home Automation System Using Android | 2016 Spring | Sefer Serhat Yazgan, , , | |||
|
Title: Bluetooth Controlled Electronic Home Automation System Using Android Overview of the project
Specific components/tools
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0464 | Nuran Doğru | 3D Laser Scanner | 2016 Spring | Ugur Ugurlugelen, Tubay Cicekci, Remzi Ozen, | |||
|
Title: 3D Laser Scanner Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0463 | Mete Vural | Bluetooth Controlled Mecanum Wheel Robot | 2016 Spring | Ali Karakus, Ismet Celik, Zeynel Abidin Sabas, | |||
|
Title: Bluetooth Controlled Mecanum Wheel Robot Overview of the project Division of tasks:
Specific components/Tools:
The completed project will be kept by the students to do as they wish. |
|||||||
| 0462 | Tolgay Kara | Implementation of Cascade Control for a Beam and Ball System Using Matlab | 2016 Spring | Gazihan Gulkalem, Mustafa Parcaci, , | |||
|
Title: Implementation of Cascade Control for a Beam and Ball System Using Matlab Overview of the project Division of Tasks:
Common: Control design, control implementation, tests. The completed project will be kept by the supervisor for further use. |
|||||||
| 0461 | Vedat Karslı | Controlling of a self balancing scooter | 2016 Spring | Ibrahim Turgut, Shewit Weldu Tesfay, Manwouna Yaou, | |||
|
Title: Controlling of a self balancing scooter Overview of the project Specific components/tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0460 | Vedat Karslı | Controlling of a self balancing and line following table | 2016 Spring | Anil Efe Efesoy, Mahmut Cevik, Buket Yildirim, | |||
|
Title: Controlling of a self balancing and line following table Overview of the project Specific components/tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0459 | Vedat Karslı | Design and construction of an educational experimental E_Learning setup system remotely controlled and operated at home by a PC (Electrical machines E_Learning course) | 2016 Spring | Sinan Ilhan, Bakmurat Kubanaliev, Aya Joubi, | |||
|
Title: Design and construction of an educational experimental E_Learning setup system remotely controlled and operated at home by a PC (Electrical machines E_Learning course) Overview of the project The completed project will be used in our laboratory. |
|||||||
| 0457 | Vedat Karslı | Control of a Quadcopter | 2016 Spring | Serkan Demir, Resit Kilic, Hakan Inci, | |||
|
Title: Control of a Quadcopter Overview of the project
The completed project will be kept by the supervisor for further use. |
|||||||
| 0456 | Vedat Karslı | Design, construction and control of a single axis (freedom) base of robot system | 2016 Spring | Ibrahim Gov, Aydin Demirel, , | |||
|
Title: Design, construction and control of a single axis (freedom) base of robot system Overview of the project Hint: An industrial robot will be considered and tried to copy base and first moving part. Specific components/tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0454 | Sema Kayhan | Remote controlling of a robot by using the gyroscope of the mobile phone | 2016 Spring | Cemal Keskin, Mehmet Ali Cap, , | |||
|
Title: Remote controlling of a robot by using the gyroscope of the mobile phone Overview of the project
Specific components/tools
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0453 | Savaş Uçkun | Design and construction based on RFID II | 2015 Fall | İsmail Polat, , , | |||
|
Title: Design and construction based on RFID II Overview of the project In this project the RFID and applications will be searched and a design and construction project will be suggested by the student. The specifications of the project will be discussed with the advisor and will be decided before project starts. |
|||||||
| 0452 | Savaş Uçkun | Design and construction based on RFID I | 2015 Fall | Süleyman Kaya, , , | |||
|
Title: Design and construction based on RFID I Overview of the project In this project the RFID and applications will be searched and a design and construction project will be suggested by the student. The specifications of the project will be discussed with the advisor and will be decided before project starts. |
|||||||
| 0451 | Vedat Karslı | Repairing and control of a prototype 3D PCB production machine II | 2015 Fall | Burak Çalışkan, Mustafa Çabuk, , | |||
|
Title: Repairing and control of a prototype 3D PCB production machine II Overview of the project The completed project will be used in our laboratory. |
|||||||
| 0450 | Tolgay Kara | An autonomic robot [IV] | 2015 Fall | Serap Sağır, Melih Çelik, , | |||
|
Title: An autonomic robot [IV] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0449 | Vedat Karslı | Improvement of a Quadcopter | 2015 Fall | Mehmet Göğebakan, Musab Aktaş, , | |||
|
Title: Improvement of a Quadcopter Overview of the project
THE FOLLOWING ARE OPTIONAL
Division of tasks The completed project will be kept by the supervisor for further use. |
|||||||
| 0448 | Tolgay Kara | An autonomic robot [III] | 2015 Fall | Mehmet Kuyar, Vedat Kocaman, Erol Gündüz, | |||
|
Title: An autonomic robot [III] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0447 | Tolgay Kara | An autonomic robot [II] | 2015 Fall | Serkan Akkılıç, Taha Konuk, Murat Çelik, | |||
|
Title: An autonomic robot [II] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0446 | Tolgay Kara | An autonomic robot [I] | 2015 Fall | Muhammed Mustafa Yıldız, Şekip Dalgaç, Nurullah Çağlar, | |||
|
Title: An autonomic robot [I] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0445 | Nurdal Watsuji | Car park aid | 2015 Fall | Ömer Faruk Mücahit Kaymaz, , , | |||
|
Title: Car park aid Overview of the project The project will have three main parts: sensors, displays, and data collection/analysis. The sensors will be used to check for the number of cars inside the car park and whether a specific space is available or not. The information is then sent to a system that displays the data on a large monitor at the entrance of the car park. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0444 | Serkan Özbay | Improvement of eye tracking system | 2015 Fall | Medine Çandır, Özge Gök, Hatice Demir, | |||
|
Title: Improvement of eye tracking system Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0443 | Serkan Özbay | Improvement of Wireless power transfer system | 2015 Fall | Merve Sever, Merve Demirel, , | |||
|
Title: Improvement of Wireless power transfer system Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0442 | Ergun Erçelebi | Improvement of mobile phone controlled robot design | 2015 Fall | Nihal Çalışkan, Gizem Özgüzel, , | |||
|
Title: Improvement of mobile phone controlled robot design Overview of the project Division of tasks:
The completed project will be kept by the student(s) to do with as they wish. |
|||||||
| 0441 | Taner İnce | Remote control of Robot with Android Phone | 2015 Fall | Dilvin Özgüneyli, Kübra Öztunç, , | |||
|
Title: Remote control of Robot with Android Phone Overview of the project
Division of Tasks:
Tools:
|
|||||||
| 0440 | Nurdal Watsuji | Variable Speed Multi Program Sumo Robot | 2015 Fall | Uğur Can Adaş, Hasan Aktaş, , | |||
|
Title: Variable Speed Multi Program Sumo Robot Overview of the project
Division of Tasks:
Tools:
|
|||||||
| 0439 | Sema Kayhan | Pulse Meter Design | 2015 Fall | İsmail Köroğlu, Uğur Oku, , | |||
|
Title: Pulse Meter Design Overview of the project Division of Tasks: To be determined in the first meeting.
Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0438 | Ergun Erçelebi | XY-Plotter Design | 2015 Fall | Şevki Yılmaz, Mehmet Okan Karakuzular, , | |||
|
Title: XY-Plotter Design Overview of the project Division of Tasks: To be determined in the first meeting. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0437 | Arif Nacaroğlu | Gap Jumping Robot | 2015 Fall | Yusuf Karakoç, Gamze Adıgüzel, , | |||
|
Title: Gap Jumping Robot Overview of the project Division of Tasks:
Tools:
Estimated Cost: Around 300 TL |
|||||||
| 0436 | Nurdal Watsuji | Floor Parking Project | 2015 Fall | Sercan Bozkurt, , , | |||
|
Title: Floor Parking Project Overview of the project Tools:
Estimated Cost: Approximately 300 TL |
|||||||
| 0435 | Rauf Mirzababayev | Design and Construction of A Balancing Robot | 2015 Fall | Utku Çınar, Vahide Aykaç, , | |||
|
Title: Design and Construction of A Balancing Robot Overview of the project Hardware Structure (Draft)  
Division of Tasks:
Tools: DC Motor, Atmel Microcontroller, Motor Driver, Accelerometer and Gyroscope Sensor Estimated Cost: 450 TL |
|||||||
| 0434 | Tolgay Kara | Design and Construction of an Automatic Target Shooting Tank | 2015 Fall | Leyla Özdemir, Hazan Özbek, , | |||
|
Title: Design and Construction of an Automatic Target Shooting Tank Overview of the project Tools: mechanical part(frame), pallet, shaft, barrel, servo motors, camera system, laser system, microcontroller (arduino) Division of Tasks:
Estimated Cost: 1000 TL. |
|||||||
| 0433 | Vedat Karslı | Power Generator Shoes | 2015 Fall | Mehmet Burak Türkcan, Ömer Faruk Elçim, Taner Cem Gülşen, | |||
|
Title: Power Generator Shoes Overview of the project   Division of Tasks:
Estimated Cost:
|
|||||||
| 0432 | Serkan Özbay | Improvement of Microcontroller and DTMF based automated soil irrigation system | 2015 Fall | Süleyman Burak Çoban, Tuğba Boydağ, , | |||
|
Title: Improvement of Microcontroller and DTMF based automated soil irrigation system Overview of the project Division of Tasks: To be determined in the first meeting. |
|||||||
| 0431 | Arif Nacaroğlu | Heat Tracking PC Based Mobile Robot | 2015 Fall | Casım Argündoğan, Musa İrgi, , | |||
|
Title: Heat Tracking PC Based Mobile Robot Overview of the project
Division of Tasks:
Tools:
|
|||||||
| 0430 | Rauf Mirzababayev | Flight Control of Small Electric Aircraft | 2015 Fall | Neslihan Tuttokmağı, Sefa Nur Yatalakoğlu, , | |||
|
Title: Flight Control of Small Electric Aircraft Overview of the project
Division of Tasks:
Tools:
|
|||||||
| 0429 | Vedat Karslı | Greenhouse Robot Project | 2015 Fall | Abdülkadir Öyke, Sabri Alperen, Ramazan Salık, | |||
|
Title: Greenhouse Robot Project Overview of the project
Division of Tasks:
Tools: Visual C#. Estimated Budget:
|
|||||||
| 0428 | Rauf Mirzababayev | PH Meter with Temperature Sensor | 2015 Fall | Mesut Akbaş, Nadire Eda Adanır, , | |||
|
Title: PH Meter with Temperature Sensor Overview of the project Division of Tasks: We prefer to work together on every part of the project. We estimate to meet two or three times in a week, and study for the project. Tools:
Estimated Budget:
|
|||||||
| 0427 | Nurdal Watsuji | Mobile Alarm Clock | 2015 Fall | Recep Ayhan, Mehmet Ali Caymaz, , | |||
|
Title: Mobile Alarm Clock Overview of the project Division of Tasks: To be decided at the first meeting. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0426 | Ergun Erçelebi | Design and Implementation of Quadcopter II | 2015 Fall | Ali Volkan Gökbulut, Muhammed Bulut, , | |||
|
Title: Design and Implementation of Quadcopter II Overview of the project Division of Tasks: To be determined in the first meeting. The completed project will be kept by the supervisor for further use. |
|||||||
| 0425 | Tolgay Kara | PLC based liquid level control and mixing | 2015 Fall | Ümit Demir, Bozan Ecer, Abdülmelik Taşkın, | |||
|
Title: PLC based liquid level control and mixing Overview of the project
Division of Tasks:
Ümit Demir: Bozan Ecer, Abdülmelik Taşkın: Tools:
Estimated Budget: Probably less than 1000 TL |
|||||||
| 0424 | Vedat Karslı | Control of single axis electromagnetic levitation system using microcontroller/FPGA | 2015 Fall | Hasan Baltacı, Gökhan Demir, , | |||
|
Title: Control of single axis electromagnetic levitation system using microcontroller/FPGA Overview of the project Division of the Tasks: To be determined in the first meeting. Specific components/tools: Some of the required components will be provided by supervisor. The completed project will be kept by the supervisor for further use. |
|||||||
| 0423 | Tolgay Kara | Design and Implementation of a 2DOF Helicopter Motion Control Experiment | 2015 Fall | Kerem Güzel, Oğuzhan Koca, Buğra Berik, | |||
|
Title: Design and Implementation of a 2DOF Helicopter Motion Control Experiment Overview of the project
Division of tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0422 | Sema Kayhan | Voice Controlled Car | 2015 Fall | Mücahit Karaman, Cihangir Kaya, , | |||
|
Title: Voice Controlled Car Overview of the project Division of Tasks: To be determined in the first meeting.
Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0421 | Mete Vural | PIC Based Single Phase H-bridge Inverter with Two Different Modulation Schemes | 2015 Fall | Fatma Merve Ayaz, , , | |||
|
Title: PIC Based Single Phase H-bridge Inverter with Two Different Modulation Schemes Overview of the project Specific components/Tools: Given in the overview. The completed project will be kept by the supervisor for further use. |
|||||||
| 0420 | Ergun Erçelebi | Development of Voice Over IP (VoIP) for Voice Communication Over Internet | 2015 Fall | Khaled Asaad, , , | |||
|
Title: Development of Voice Over IP (VoIP) for Voice Communication Over Internet Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0419 | Ergun Erçelebi | Prototype Design of Coffee Maker Machine | 2015 Fall | Hasan Özsoy, Mehmet Emin Kuş, , | |||
|
Title: Prototype Design of Coffee Maker Machine Overview of the project Division of Tasks: To be determined in the first meeting. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0417 | Ergun Erçelebi | Implementation of Turbo channel coder in FPGA | 2016 Spring | Resat Surucu, Sefa Sanbay, , | |||
|
Title: Implementation of Turbo channel coder in FPGA Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0416 | Ergun Erçelebi | Design and Implementation of Quadcopter I | 2015 Fall | Cihan Demir, Mehmet Ergül, , | |||
|
Title: Design and Implementation of Quadcopter I Overview of the project Division of Tasks: To be determined in the first meeting. The completed project will be kept by the supervisor for further use. |
|||||||
| 0415 | Ergun Erçelebi | 3D Printer Design | 2015 Fall | Hakan Çetinkaya, Ali Güneş, Kemal Tur, | |||
|
Title: 3D Printer Design Overview of the project Division of Tasks: To be determined in the first meeting. The completed project will be kept by the supervisor for further use. |
|||||||
| 0413 | Sema Kayhan | Automatic Car Parking System | 2015 Fall | Mehmet Topak, , , | |||
|
Title: Automatic Car Parking System Overview of the project
Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0412 | Sema Kayhan | Design and Control a Conveyor Band to Count and Separate Parts on it | 2015 Fall | Fatih Bozdağ, , , | |||
|
Title: Design and Control a Conveyor Band to Count and Separate Parts on it Overview of the project
Specific components/tools The completed project will be kept by the students to do with as they wish. |
|||||||
| 0411 | Taner İnce | Sudoku Solver using Signal Processing | 2015 Fall | Sümeyye Andaç Güler, Neziha Demir, , | |||
|
Title: Sudoku Solver using Signal Processing Overview of the project Division of Tasks:
Specific components/Tools: MATLAB The completed project will be kept by the students to do with as they wish. |
|||||||
| 0410 | Taner İnce | Automatic Turkish Coffee Maker | 2015 Fall | İsa Orbay, Semih Gencer, , | |||
|
Title: Automatic Turkish Coffee Maker Overview of the project Division of Tasks: Both students will work on the same task. Specific components/Tools:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0409 | Mete Vural | Internet-controlled 100W single-phase inverter for renewable energy applications | 2015 Fall | Hüseyin Soysal, Hakan Sürer, , | |||
|
Title: Internet-controlled 100W single-phase inverter for renewable energy applications Overview of the project Division of Tasks:
Specific components/tools: Arduino based solution is expected. The completed project will be kept by the supervisor for further use. |
|||||||
| 0408 | Ergun Erçelebi | Design and implementation of prototype sizing machine | 2015 Fall | Mustafa Can Ekinci, , , | |||
|
Title: Design and implementation of prototype sizing machine Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0407 | Tolgay Kara | Beam and Ball control using Matlab | 2015 Fall | Aykut Tamer, Burak Selin Kaynak, Fatih Özkan Alkurt, | |||
|
Title: Beam and Ball control using Matlab Overview of the project
Division of tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0406 | Mete Vural | Single-phase Smart Meter | 2015 Fall | Sedat Şahin, Uğur Özdemir, , | |||
|
Title: Single-phase Smart Meter Overview of the project Division of Tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0405 | Mete Vural | Internet based current measurement for smart grid environment | 2015 Fall | Bilal Özçaycılar, Devran Yakar, , | |||
|
Title: Internet based current measurement for smart grid environment Overview of the project Division of Tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0404 | Tolgay Kara | Simple plotter | 2015 Spring | İsmail Koşan, Ahmet Türk, Aziz Tukik, | |||
|
Title: Simple plotter Overview of the project
Division of tasks: [link to example construction] |
|||||||
| 0403 | Mete Vural | Wireless Temperature Transfer (II) | 2015 Spring | Ahmet Acar, , , | |||
|
Title: Wireless Temperature Transfer (II) Overview of the project Tools: PIC or Arduino, Bluetooth or RF module. The completed project will be kept by the supervisor for further use. |
|||||||
| 0402 | Vedat Karslı | Design and construction of a remote control unit by a mobile phone or GSM module for a telemetry system | 2015 Spring | Murat Çakır, Gökhan Özkan, , | |||
|
Title: Design and construction of a remote control unit by a mobile phone or GSM module for a telemetry system Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0401 | Vedat Karslı | Design and construction of a prototype 3D printing machine (II) | 2015 Spring | Önder Orbeyi, Sadık Aktulum, Hamza Emir, | |||
|
Title: Design and construction of a prototype 3D printing machine (II) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0399 | Vedat Karslı | Sample and store at least 4 channel analog signals on a micro SD card and display them on a graphic LCD in real time. | 2015 Spring | Kemal Refik Ertabak, Oğuzhan Yıldız, , | |||
|
Title: Sample and store at least 4 channel analog signals on a micro SD card and display them on a graphic LCD in real time. Overview of the project Some parts will be provided by supervisor himself. The completed project will be kept by the supervisor for further use. |
|||||||
| 0398 | Ergun Erçelebi | Design and Implementation of Advanced Encryption Standard on an FPGA | 2015 Spring | Sedat Özdemir, Eray Köse, , | |||
|
Title: Design and Implementation of Advanced Encryption Standard on an FPGA Overview of the project In this project, students will design encryptor and decryptor parts on FPGA which has AES algorithm based on the Rijndael cipher with a block size of 128 bits and 256 bit key length. Also, they will design an interface program to send and retrieve the data from FPGA to computer. Users should be able to send plaintext to the FPGA through an interface program on computer, FPGA module will encrypt the text, and then send it back to the interface on the computer or vice versa. FPGA modules will be provided to students by supervisor. Therefore, no other equipment is needed for this project. Prerequisite: You have to be qualified on Programming and Digital Design courses.
|
|||||||
| 0397 | Tolgay Kara | Medication Finder | 2015 Spring | Ömer Arslan, , , | |||
|
Title: Medication Finder Overview of the project The design makes use of 2D Cartesian system (2D handling system) where we have a system that can move in two axes. A basket will be designed and mounted on this system. The shelves have some slope because medications drop into the basket easily from sloped shelves. There is a ramp to come up the side of the sliding table of medications. We carry out the overall control of our system with a user interface program that is installed on the computer. We select medications by this program and we click the button (Collect). Selected medications are collected and dropped into the basket. Medications slip until the end of the ramp next to pharmacy's counter. Project will be supported by Microgrant. Equipment and estimated costs:
|
|||||||
| 0396 | Rauf Mirzababayev | Fruit Dryer | 2015 Spring | Erhan Uluğ, Deniz Yalçın, , | |||
|
Title: Fruit Dryer Overview of the project Division of Tasks:
Tools:
Estimated Budget: 350 TL
|
|||||||
| 0395 | Taner İnce | Design of a Braille alphabet printer | 2015 Spring | Gülçin Hande Altaş, Yasin Özer Yorulmaz, , | |||
|
Title: Design of a Braille alphabet printer Overview of the project Division of Tasks:
Specific components/Tools: Arduino (An open-source electronics platform), Servo motors The completed project will be kept by the supervisor for further use. |
|||||||
| 0394 | Taner İnce | Development of an android application for image processing | 2015 Spring | Merdan Oǧuzhan Çelik, Mustafa Yasin Erdem, , | |||
|
Title: Development of an android application for image processing Overview of the project Division of Tasks:
Specific components/tools: Android smartphone, OPENCV (free open source computer vision toolbox) The completed project will be kept by the supervisor for further use. |
|||||||
| 0393 | Rauf Mirzababayev | PH Meter | 2015 Spring | Melek Aydoğan, Seher Kılınç, , | |||
|
Title: PH Meter Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0392 | Gölge Öğücü | Secure Wearable ID Watch | 2015 Spring | Bensu Pınar Bozoğlan, Mertcan Tok, Adem Ekinci, | |||
|
Title: Secure Wearable ID Watch Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0391 | Gölge Öğücü | Swivel Makeup Mirror | 2015 Spring | Harun Gürdal, Bünyamin Çalık, , | |||
|
Title: Swivel Makeup Mirror Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0390 | Savaş Uçkun | Design and construction based on RFID | 2015 Spring | Yusuf Bülbül, Ömer Abrancı, , | |||
|
Title: Design and construction based on RFID Overview of the project In this project the RFID and applications will be searched and a design and construction project will be suggested by the student. The specifications of the project will be discussed with the advisor and will be decided before project starts. Prerequisite: the student(s) must have a pass grade for EEE361. |
|||||||
| 0389 | Ergun Erçelebi | Improvement of Microcontroller and DTMF based automated soil irrigation system | 2015 Spring | İbrahim Karademir, , , | |||
|
Title: Improvement of Microcontroller and DTMF based automated soil irrigation system Overview of the project
The student must have knowledge about the relays that supervisor will provide. Using these relays she/he will make a board for submersible motor control and protection. Then for remotely start/stop, she/he will design a circuit including design microcontroller, dual tone multi frequency (DTMF) decoder, electrical and electronic components. The system will be activated remotely through mobile phone. The project outcome will be tested in real-time application. The completed project will be kept by the supervisor for further use. |
|||||||
| 0387 | Ergun Erçelebi | Development of belt lift for the automotive industry | 2015 Spring | Hüseyin Al, Mustafa Toygar, , | |||
|
Title: Development of belt lift for the automotive industry Overview of the project Division of Tasks:
|
|||||||
| 0386 | Ergun Erçelebi | Development of isolated word-speech recognition with DSPIC or PIC32 microcontroller | 2015 Spring | Kübra Kurum, , , | |||
|
Title: Development of isolated word-speech recognition with DSPIC or PIC32 microcontroller Overview of the project Division of Tasks:
Tools:
|
|||||||
| 0385 | Ergun Erçelebi | Development of PIC32 Microcontroller Platform for Game Programming | 2015 Spring | Mehmet Orhan Soyttürk, , , | |||
|
Title: Development of PIC32 Microcontroller Platform for Game Programming Overview of the project Division of Tasks:
Tools:
|
|||||||
| 0384 | Ergun Erçelebi | Monitoring and Control Using PLC and SCADA in Photovoltaic solar system | 2015 Spring | Semih Karabulut, İsmail Gevher, , | |||
|
Title: Monitoring and Control Using PLC and SCADA in Photovoltaic solar system Overview of the project Division of Tasks:
|
|||||||
| 0383 | Nurdal Watsuji | Robotic Hand Quadcopter | 2015 Spring | Gökhan Gülmez, Ebubekir Aykut, , | |||
|
Title: Robotic Hand Quadcopter Overview of the project Division of Tasks:
Gökhan GÜLMEZ: Ebubekir AYKUT: Tools:
Estimated Budget: 520 TL |
|||||||
| 0382 | Uğur Cem Hasar | Animatronic Hand | 2015 Spring | Hilal Kılınç, , , | |||
|
Title: Animatronic Hand Overview of the project Tools:
Estimated Budget: 500 TL |
|||||||
| 0381 | Serkan Özbay | High Precision Voltmeter for Remote Operation | 2015 Spring | Bahar Günal, , , | |||
|
Title: High Precision Voltmeter for Remote Operation Overview of the project Tools: Arduino Uno, LTC2400 (ADC), PCB (controller), RS232 board, RF transmitter and receiver. Estimated Budget: 120 TL |
|||||||
| 0379 | Mete Vural | Wireless Temperature Transfer | 2015 Spring | Cansu Akkuş, , , | |||
|
Title: Wireless Temperature Transfer Overview of the project Tools: PIC or Arduino, Bluetooth or RF module. The completed project will be kept by the supervisor for further use. |
|||||||
| 0378 | Mete Vural | Arduino based digital oscilloscope | 2015 Spring | Ekin Erdoğdu, Rıdvan Alpay Kurbaloğlu, , | |||
|
Title: Arduino based digital oscilloscope Overview of the project Tools: arduino microcontroller, required if any The completed project will be kept by the supervisor for further use. |
|||||||
| 0377 | Sema Kayhan | A voice calculator | 2014 Fall | Mahmut úiloğlan, Erman Kolsuz, , | |||
|
Title: A voice calculator Overview of the project Division of tasks: one student for design, the other student for software. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0376 | G—lge øğ■c■ | Unmanned mobile target GPS pointer system | 2014 Fall | Selman Arslan, Sadık Omak (Antep), ømer øncel, İsa S■rer | |||
|
Title: Unmanned mobile target GPS pointer system Overview of the project The vehicle can be remotely controlled by the user. User control panel will have a monitoring system, which takes vision from the wireless camera mounted on top of the vehicle turret. This provides the user correct targeting and pointing position, and also the user can get vision of the forward direction of the vehicle. The system requires limited intelligence for user and other background units (Artillery or long range defence system). The system turret can rotate 150 degrees about vertical axis and 350 degrees about the horizontal axis. Vehicle movement is provided by continuous track. Tracked vehicle is expected to overcome certain types of obstacles (like small rocks or bumps). The system turret fires GPS module bullets. When a bullet hits the target, outer shell breaks and inner shell sticks to the target. It starts transmitting GPS coordinate data to background units. Division of tasks:
|
|||||||
| 0375 | Ergun ErÓelebi | A mobile phone-controlled robot design II | 2014 Fall | Muhammed Bayram, Mehmet øzyılmaz, , | |||
|
Title: A mobile phone-controlled robot design II Overview of the project Division of tasks:
The completed project will be kept by the student(s) to do with as they wish. |
|||||||
| 0374 | Uğur Cem Hasar | Automatic car braking system | 2014 Fall | Erkan Erdem (Manisa), , , | |||
|
Title: Automatic car braking system Overview of the project The system will have a switch to activate or deactivate it. When it is deactivated the car should operate as normal. When it is activated a green LED should indicate so. A any time the system is intervening (braking) a red LED show indicate so. The total cost (excluding the remote-control car) will not exceed 100 TL. The completed project will be a gift to Erkan's nephew after careful consideration of it's safety :-) |
|||||||
| 0373 | Rauf Mirzababayev | Device for the atmospheric pressure and humidity measurements I | 2014 Fall | Ahmed Aydın, Duishon Satbaldyev, , | |||
|
Title: Device for the atmospheric pressure and humidity measurements I Overview of the project
Division of tasks: |
|||||||
| 0372 | Serkan øzbay | Portable solar-powered charging station for electric devices II | 2014 Fall | Mustafa Aksu, Ahmet Zişan Koca, T■mer Savat, | |||
|
Title: Portable solar-powered charging station for electric devices II Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0371 | Ahmet UÓar | Automation of greenhouse over the Internet | 2014 Fall | Ali Taşkin, G—khan Velet, Yakup Yener, | |||
|
Title: Automation of greenhouse over the Internet Overview of the project The project will be controlled automatically (and manually over the Internet). For example; when the temperature rises, a fan will run for circulation of air. When the soil humidity is low, the irrigation system will run automatically. When the weather is rainy, the roof of greenhouse will open for benefit of plants. There will be a fan and light in the greenhouse. We can control the fan and light over internet. There will be a smoke gas sensor and PIR motion sensor in the greenhouse for security. If any signal is detected from these sensors, we will see an alarm on screen. All of these systems will be over internet. We will see instantaneous values of humidity, temperature of air and humidity of soil. We can manually override the system over the Internet.
Division of tasks: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0370 | Uğur Cem Hasar | Object collection and sorting by an autonomous robot | 2014 Fall | Şeyma Pınar Alapinar (Adana), H■samettin úoban, Ezgi Karakaya, Veysel Yıldırım | |||
|
Title: Object collection and sorting by an autonomous robot Overview of the project
Division of tasks: The group will provide soon more details about this project, especially division of tasks. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0369 | Rauf Mirzababayev | Electronic scale | 2014 Fall | Emek Hazal Bingol, Hasan karadağ, , | |||
|
Title: Electronic scale Overview of the project
Division of tasks: |
|||||||
| 0368 | Rauf Mirzababayev | Device for the atmospheric pressure and humidity measurements II | 2014 Fall | Ali Alpar Annag■r, İlker Okuducu, , | |||
|
Title: Device for the atmospheric pressure and humidity measurements II Overview of the project
Division of tasks: |
|||||||
| 0367 | G—lge øğ■c■ | Robotic painter | 2014 Fall | Fırat Banisi, G■ven úeberli, Ozan G—kdere, | |||
|
Title: Robotic painter Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0366 | Serkan øzbay | Smart automobile units control system | 2014 Fall | Muhammet Cihangiroğlu (Antep), , , | |||
|
Title: Smart automobile units control system Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0365 | Serkan øzbay | Portable solar-powered charging station for electric devices I | 2014 Fall | Ulaş Dikme, Yusuf Bilge Saldamlı, Alperen Soyalp, | |||
|
Title: Portable solar-powered charging station for electric devices I Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0364 | Serkan øzbay | Wireless power transfer system | 2014 Fall | Suna Deniz, Atiye Zeynep Diken, , | |||
|
Title: Wireless power transfer system Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0363 | Arif Nacaroğlu | Underwater robot | 2014 Fall | Ahmet Karakurt, Oğuzhan Karakuş, , | |||
|
Title: Underwater robot Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0362 | Arif Nacaroğlu | Rope-jumping robot | 2014 Fall | Ergin Acar Akg■l, Mehmet Muşta, , | |||
|
Title: Rope-jumping robot Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0361 | Vedat Karslı | Insect killer_1 | 2014 Fall | G—khan Parlak, , , | |||
|
Title: Insect killer_1 Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0360 | Vedat Karslı | Home Automation Over Internet [v2] | 2014 Fall | Zerrin G■lderen, G—khan Terzi, Feride Yıldız (Antep), | |||
|
Title: Home Automation Over Internet [v2] Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0359 | Vedat Karslı | Design, construction and Control of a Ginger | 2015 Spring | Bahadır Halil, İbrahim Kocaöz, Celal Solak, | |||
|
Title: Design, construction and Control of a Ginger Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0358 | Vedat Karslı | Design and construction of a prototype 3D PCB production machine | 2015 Spring | Alican Öztürk, Tuğcan Dündar, Mustafa Eren Sevimli, | |||
|
Title: Design and construction of a prototype 3D PCB production machine Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0357 | Vedat Karslı | Repairing and control of a prototype 3D PCB production machine I | 2015 Fall | Burak Erdurak, , , | |||
|
Title: Repairing and control of a prototype 3D PCB production machine I Overview of the project The completed project will be used in our laboratory. |
|||||||
| 0356 | Vedat Karslı | Design and construction of a prototype 3D printing machine | 2015 Spring | Samed Tuğluoğlu, Onur Dokumacı, Bahattin Baki Çoşkun, | |||
|
Title: Design and construction of a prototype 3D printing machine Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0355 | Ergun ErÓelebi | Implementation and design of an L-band up and down converter | 2014 Fall | Emin Akkurt (Ankara), Eray Erbay, , | |||
|
Title: Implementation and design of an L-band up and down converter Overview of the project In this project students will design and implement L-band transmitter and receiver. Frequency range for L-band transmitter is between 950 and 1525 MHz while the frequency range for the receiver is between 950 and 1750MHz. A typical L-band transceiver is composed of phase lock loop (PLL), mixer, voltage controlled oscillator and filter. After completion of the design, students will be expected to test operability of the system using a sine wave. Specific components/tools: phase lock loop (PLL), mixer, VCO, filter. The completed project will be kept by the student(s) to do with as they wish. |
|||||||
| 0354 | Ergun ErÓelebi | A mobile phone controlled robot design I | 2014 Fall | Murat Cebeci, Velit úaltekin (Antep), , | |||
|
Title: A mobile phone controlled robot design I Overview of the project Division of tasks:
The completed project will be kept by the student(s) to do with as they wish. |
|||||||
| 0353 | Ergun ErÓelebi | Microcontroller and DTMF based automated soil irrigation system | 2014 Fall | G—khan Yaylak, Ender Yiyit, , | |||
|
Title: Microcontroller and DTMF based automated soil irrigation system Overview of the project In this project student will develop an automatic irrigation system. The project will include simply the automation of a water sprinkler. The project will include mainly three parts:
Specific components/tools: Dual-tone multi-frequency, microcontroller, timer relay, overcurrent relay, water level relay will be provided by supervisor. Division of tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0352 | Ergun ErÓelebi | Design and implementation of grounding resistance measurement and monitoring system | 2014 Fall | Alican Doğruel, Can KoÓ, , | |||
|
Title: Design and implementation of grounding resistance measurement and monitoring system Overview of the project The completed project will be kept by the student(s) to do with as they wish. |
|||||||
| 0351 | Ergun ErÓelebi | Simulation of vector controlled Brushless DC Motors | 2014 Fall | Bet■l Elhan, , , | |||
|
Title: Simulation of vector controlled Brushless DC Motors Overview of the project The completed project will be kept by the student(s) to do with as they wish. |
|||||||
| 0350 | Ergun ErÓelebi | Implementation and design of delta-sigma Modulator | 2014 Fall | Nihat Altun (istanbul), , , | |||
|
Title: Implementation and design of delta-sigma Modulator Overview of the project Specific components/tools: difference amplifier (delta), integrator (sigma), comparator, 1-bit DAC. The completed project will be kept by the student(s) to do with as they wish. |
|||||||
| 0349 | Mete Vural | Ardunio based GPS controlled car (II) | 2014 Fall | Aylin Gesoğlu, Gizem Yalman, , | |||
|
Title: Ardunio based GPS controlled car (II) Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0348 | Mete Vural | Wireless wind speed measurement (I) | 2014 Fall | İbrahim úelik, Yağmur İlhan (Antep), , | |||
|
Title: Wireless wind speed measurement (I) Overview of the project Components: PIC, ardunio or a similar embedded controller. The completed project will be kept by the student to do with as they wish. |
|||||||
| 0347 | Nurdal Watsuji | Person-following robot (II) | 2014 Fall | Muhsine Efe, K■bra G—ksu, Osman İlhan, | |||
|
Title: Person-following robot (II) Overview of the project The three students will decide on the overall design, and then appropriate division of tasks.
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0346 | Nurdal Watsuji | Person-following robot (I) | 2014 Fall | İsmail Serkan Bulut, Fatih Korkmaz, Mahmut ølÓ■l■, | |||
|
Title: Person-following robot (I) Overview of the project The three students will decide on the overall design, and then appropriate division of tasks. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0345 | Tolgay Kara | Autonomous field resource and rescue system | 2014 Summer | Semir Aydin (istanbul), Merve Benli (istanbul), , | |||
|
Title: Autonomous field resource and rescue system Overview of the project
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0344 | Vedat Karslı | Preparation of at least two experimental setups for ALTERA FPGA DE2-115 development board | 2014 Fall | Aysel Bekler, G—khan Bilik, , | |||
|
Title: Preparation of at least two experimental setups for ALTERA FPGA DE2-115 development board Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0343 | Vedat Karslı | Design and construction of a remote control unit by a mobile phone or GSM module for a telemetry system | 2014 Fall | Murat Cakır, Cumali GenÓer, , | |||
|
Title: Design and construction of a remote control unit by a mobile phone or GSM module for a telemetry system Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0342 | Vedat Karslı | Preparation of at least two experimental setups for MSP430 16 bit MCU | 2014 Fall | Ahmet Canbolat, Alican Yaldız (Antep), , | |||
|
Title: Preparation of at least two experimental setups for MSP430 16 bit MCU Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0339 | Vedat Karslı | Preparation of at least two experimental setups for STM32F0 32bit ARM cortex MCU (I) | 2014 Fall | Mehmet Uğur Kebir, Tuğrul KekeÓ, , | |||
|
Title: Preparation of at least two experimental setups for STM32F0 32bit ARM cortex MCU (I) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0338 | Vedat Karslı | Design and construction of a secure RF remote control unit for a telemetry system | 2014 Fall | Bahadır G—kÓe, Okan øzbaş, , | |||
|
Title: Design and construction of a secure RF remote control unit for a telemetry system Overview of the project Several information such as voltage, current, temperature etc. will be sent from a moving car and will be received from a center securely. The distance must be at least 1 km. Sender and receiver parts will be equipped with at least four row display and keypad. The signals must not be mixed in any way. Required parts will be provided by students. The completed project will be kept by the supervisor for further use. |
|||||||
| 0337 | Sema Kayhan | Automated ventilation and safety for a smokers room | 2014 Summer | Sedat Kanatlı (istanbul), Recep Pehlivan, , | |||
|
Title: Automated ventilation and safety for a smokers room
Overview of the project
Division of tasks: Budget: Arduino mega :2x30 tl The completed project will be kept by the student to do with as they wish. |
|||||||
| 0336 | Tolgay Kara | Experimental PID design for position control of a PMDC motor | 2014 Fall | Abdurrahim Muratoğlu (istanbul), Murat Taş, , | |||
|
Title: Experimental PID design for position control of a PMDC motor Overview of the project Division of tasks:
The completed project will be donated to the department for display or lab. |
|||||||
| 0335 | Tolgay Kara | Experimental PID design for speed control of a PMDC motor | 2014 Summer | Hacı Altay (istanbul), İkbal Nurullah Dal (adana), , | |||
|
Title: Experimental PID design for speed control of a PMDC motor Overview of the project Division of tasks:
The completed project will be donated to the department for display or lab. |
|||||||
| 0334 | Mete Vural | Single-phase digital wattmeter | 2014 Fall | Mevl■t Demirci, Halime Şahin, , | |||
|
Title: Single-phase digital wattmeter Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0333 | Mete Vural | Ardunio based GPS controlled car (I) | 2014 Fall | Yeşim Kaplan, Ceren Tuğba Karakaya, , | |||
|
Title: Ardunio based GPS controlled car (I) Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0331 | Mete Vural | Wireless wind speed measurement (II) | 2014 Fall | Ahmet Şengez, Tolgacan Y■cel, , | |||
|
Title: Wireless wind speed measurement (II) Overview of the project Components: PIC, ardunio or a similar embedded controller. The completed project will be kept by the student to do with as they wish. |
|||||||
| 0330 | Arif Nacaroğlu | Hand held device for remote height estimation | 2014 Spring | Sedat Onatlı, Akbar Shadakov, , | |||
|
Title: Hand held device for remote height estimation Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0328 | Serkan øzbay | Design of a vending machine prototype | 2014 Spring | Buğra Aslan, İpek Yurdakul, , | |||
|
Title: Design of a vending machine prototype Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0326 | Tolgay Kara | Sentry Gun Project Defined Object Detection | 2014 Spring | Mehmet Emin Deniz, Mehmet Ali Durğay, Onur Ulusoy, Şeyma Yaman | |||
|
Title: Sentry Gun Project Defined Object Detection Overview of the project Division of tasks:
Apparatus: Solderless breadboard, Arduino Uno R3, Laser pointer, Airsoft gun, Webcam, Battery, Wood/Metal, Mosfet, LED, resistors etc, Cable,screws, nuts etc. Estimate cost: 400 TL
|
|||||||
| 0325 | Rauf Mirzababayev | Automatic gain for an audio system | 2014 Spring | Osman Bostancı, Mehmet T■rkmen, , | |||
|
Title: Automatic gain for an audio system Overview of the project The project consists of a sound detector, signal conditioning circuit and an amplifier. The signal from the detector will be digitised, controlled and finally sent to an amplifier to get the desired sound level. |
|||||||
| 0324 | Serkan øzbay | Automatic rain sensing wiper for automobiles | 2014 Spring | Fatih Kececioğlu, Arif Yildiz, , | |||
|
Title: Automatic rain sensing wiper for automobiles Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0323 | Arif Nacaroğlu | Line-following, gap-jumping robot | 2014 Spring | Ersun Altan, Musab Bayat, , | |||
|
Title: Line-following, gap-jumping robot Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0322 | Vedat Karslı | Home automation over PAN | 2014 Spring | Hakkı Işık, İlkercan İncili, , | |||
|
Title: Home automation over PAN Overview of the project Some of the required components will be provided by the supervisor. The completed project will be kept by the supervisor for further use. |
|||||||
| 0321 | Vedat Karslı | A prototype levitation control system using dsPIC30F4011/dsPIC30F2011 (II) | 2014 Spring | Şehmus BaşÓı, Beraat İpek, Ahmet Layık, | |||
|
Title: A prototype levitation control system using dsPIC30F4011/dsPIC30F2011 (II) Overview of the project Some of the required components will be provided by supervisor. The completed project will be kept by the supervisor for further use. |
|||||||
| 0320 | Vedat Karslı | Prototype levitation control system using dsPIC30F 4011/2011 (I) | 2014 Spring | S■leyman úetinkaya, Anıl ú—zvelioğlu, , | |||
|
Title: Prototype levitation control system using dsPIC30F 4011/2011 (I) Overview of the project Some of the required components will be provided by supervisor.
Division of tasks The completed project will be kept by the supervisor for further use. |
|||||||
| 0319 | Vedat Karslı | Design and construction of an RF remote control unit (sender and receiver) for a Quadcopter (II) | 2014 Fall | İhsan Demir, İlyas Kaya, , | |||
|
Title: Design and construction of an RF remote control unit (sender and receiver) for a Quadcopter (II) Overview of the project RF control unit must be designed and operated up to 30m distance. The completed project will be kept by the supervisor for further use. |
|||||||
| 0318 | Vedat Karslı | Design and construction of speed controller of a Quad-copter (I) | 2014 Fall | B■şranur Polat, Dilara Saygı (Antep), , | |||
|
Title: Design and construction of speed controller of a Quad-copter (I) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0317 | Vedat Karslı | Three dimensional controlling of a graphic shape drawn on the monitor of a PC with a data taken from a microcontroller through USB and/or RS232 port | 2015 Spring | Oğuz Kaan Erikan, İbrahim Gülçek, , | |||
|
Title: Three dimensional controlling of a graphic shape drawn on the monitor of a PC with a data taken from a microcontroller through USB and/or RS232 port Overview of the project Some of the required components will be provided by supervisor. The completed project will be kept by the supervisor for further use. |
|||||||
| 0316 | Tolgay Kara | Autonomous blimp with altitude control | 2014 Spring | Yaşar Karacan, Émit TunÓ, , | |||
|
Title: Autonomous blimp with altitude control Overview of the project Optionally, in addition to keeping its altitude constant, it is also expected (if possible) that the airship avoids contact with walls and obstacles. Division of tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0315 | Savaş Uçkun | Design and construction based on RFID | 2014 Fall | Batuhan Demiralp, Kaan Sarıveli, , | |||
|
Title: Design and construction based on RFID Overview of the project In this project the RFID and applications will be searched and a design and construction project will be suggested by the student. The specifications of the project will be discussed with the advisor and will be decided before project starts. Prerequisite: the student(s) must have a pass grade for EEE361. |
|||||||
| 0314 | Erg■n ErÓelebi | DC/AC single-phase voltage source inverter design | 2014 Spring | Ezgi Evlice, Elzem Misirli, , | |||
|
Title: DC/AC single-phase voltage source inverter design Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0313 | Erg■n ErÓelebi | Improvement of an automatic car parking system | 2014 Spring | Mehmet Can Alkan, Stefan Ayg■l, , | |||
|
Title: Improvement of an automatic car parking system Overview of the project Specific components/tools: PLC or microcontroller, basic electrical and electronics components. The completed project will be kept by the supervisor for further use. |
|||||||
| 0311 | Nuran Doğru | DC Power Supply (fly back topology) | 2013 Fall | Orhan Alasoy, Ey■p Kaya, , | |||
|
Title: DC Power Supply (fly back topology) Overview of the project Input Voltage : 220 V a.c. Output Voltaje : 5 V d.c. \ 2 Amps Output power : 10 Watts The completed project will be kept by the student to do with as they wish. |
|||||||
| 0310 | Andrew Beddall | Smart crib rocker | 2013 Fall | Lokman Ektiren, Veysi G—khan, , | |||
|
Title: Smart crib rocker
Overview of the project
Design overview
Apparatus/Tools
Cost
Division of tasks The completed project will be kept by the student to do with as they wish. |
|||||||
| 0309 | Savaş UÓk■n | FM jammer and transmitter | 2013 Fall | Arda Eftekin, , , | |||
|
Title: FM jammer and transmitter Overview of the project
Apparatus:
MP3 player, antenna, basic electronic components. Estimated cost: 50 TL. The completed project will be kept by the student to do with as they wish. |
|||||||
| 0308 | Andrew Beddall | Following Robots | 2013 Fall | İlyas Karasati, Mehmet Mihdi, , | |||
|
Title: Following Robots Overview of the project
Construction overview
Design overview
Apparatus/Tools
Task-Sharing
The completed project will be kept by the student to do with as they wish. |
|||||||
| 0306 | Nuran Doğru | PC to PC fiber optic communication | 2014 Spring | Canan Kızılateş, Nilay øzgirgin, , | |||
|
Title: PC to PC fiber optic communication Overview of the project One student will design and construct the hardware (transmitter and receiver) while the other will develop the software to test the hardware. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0305 | Serkan øzbay | Metal detector II | 2013 Fall | Adil Uğur Pehlivan, A. Samet Toprak, , | |||
|
Title: Metal detector II Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0304 | Sema Kayhan | FPGA-Based EKG development | 2013 Fall | Emre Yazkan, , , | |||
|
Title: FPGA-Based EKG development Overview of the project
Specific components/tools: |
|||||||
| 0303 | Uğur Cem Hasar | Box filler | 2013 Fall | Kadirhan Dinler, , , | |||
|
Title: Box filler Overview of the project Apparatus/tools Pulleys, motors, sensors, plc(from the EEE lab), band material, cubes, boxes. Estimated budget: 100 TL The completed project will be kept by the student to do with as they wish. |
|||||||
| 0302 | G—lge øğ■c■ | Sorting boxes according to their height | 2013 Fall | Mustafa Tasci, Harun Tastan, , | |||
|
Title: Sorting boxes according to their height Overview of the project
Specific components Estimated budget: 200 TL - 300TL The completed project will be kept by the student to do with as they wish. |
|||||||
| 0301 | Tolgay Kara | Wireless glove-controlled robotic arm | 2013 Fall | İsmail Uğur D■ndar, Yavuz Éz■lmez, , | |||
|
Title: Wireless glove-controlled robotic arm Overview of the project
Division of Tasks Costs: ... The completed project will be kept by the department |
|||||||
| 0300 | Nurdal Watsuji | Car park aid II | 2013 Fall | Osman Demir, Derviş Yiğit, , | |||
|
Title: Car park aid II Overview of the project The project will have three main parts: sensors, displays, and data collection/analysis. The sensors will be used to check for the number of cars inside the car park and whether a specific space is available or not. The information is then sent to a system that displays the data on a large monitor at the entrance of the car park. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0299 | Arif Nacaroğlu | Smart traffic lights | 2013 Fall | Ali Taşdemir, Murat Timurtaş, , | |||
|
Title: Smart traffic lights Overview of the project
Goals
Division of tasks The completed project will be kept by the student to do with as they wish. |
|||||||
| 0298 | Andrew Beddall | Automatic watering system | 2013 Fall | Mehmet Aktağ, Ertuğrul Kurubal, , | |||
|
Title: Automatic watering system Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0297 | Serkan Özbay | Metal detector | 2015 Fall | Burak Yıldırım, , , | |||
|
Title: Metal detector Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0296 | Celal Koraşlı | Extracting heat from underground power transmission cables | 2013 Fall | Nurullah úetin, Necati Kutlucan, , | |||
|
Title: Extracting heat from underground power transmission cables Overview of the project In this project, a simple heat extraction system is to be designed to achieve two aims:
|
|||||||
| 0295 | Vedat Karslı | Design and construction for a Quadcopter (II) | 2013 Fall | Yusuf K—sesoy, Sefa Şimşek, Yavuz Temur, Zafer Yılmaz | |||
|
Title: Design and construction for a Quadcopter (II) Overview of the project
THE FOLLOWING ARE OPTIONAL
Division of tasks The completed project will be kept by the supervisor for further use. |
|||||||
| 0294 | Rauf Mirzababayev | Human heat as a light source (II). | 2013 Summer early | Abdulkadir Akdağ, Tahsin úalkendir, , | |||
|
Title: Human heat as a light source (II). Overview of the project |
|||||||
| 0293 | Nurdal Watsuji | Car park aid | 2014 Spring | Servet Bilaloğlu, Hakan D—nmez, , | |||
|
Title: Car park aid Overview of the project The project will have three main parts: sensors, displays, and data collection/analysis. The sensors will be used to check for the number of cars inside the car park and whether a specific space is available or not. The information is then sent to a system that displays the data on a large monitor at the entrance of the car park. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0292 | Erg■n ErÓelebi | Three-floor elevator | 2013 Fall | Harun Tonbuloğlu, Ramazan Toprak, , | |||
|
Title: Three-floor elevator Overview of the project
Planning and Division of tasks Student 1: Fixed mechanical sections, electronic circuitsWorking principle After security precaution is taken with controlling overload and heat of machine room, by reading ON/OFF datas in the switches of the elevator gate and limiter at each floor, it will control whether the elevator is ready to run or not. If it is ready to run, in the direction of the signals coming from calling button, after the lighting of the cabin and the busy indicator, with directing to DC motor, the elevator will arrive the intended floor.
Specific components The completed project will be kept by the student to do with as they wish. |
|||||||
| 0291 | Andrew Beddall | Body temperature regulation for small animals | 2013 Fall | K■bra Bırcan, Esma Doğru, , | |||
|
Title: Body temperature regulation for small animals Overview of the project
Specific components
Division of tasks The completed project will be kept by the student to do with as they wish. |
|||||||
| 0290 | Rauf Mirzababayev | Fire-powered cellular phone charger | 2013 Fall | Cansu Talaş, , , | |||
|
Title: Fire-powered cellular phone charger Overview of the project
Specific components/design
The completed project will be kept by the student to do with as they wish. |
|||||||
| 0289 | Erg■n ErÓelebi | Student lecture attendance system | 2013 Fall | Alican S—nmez, , , | |||
|
Title: Student lecture attendance system Overview of the project
Specific components/tools: The completed project will be kept by the supervisor for further use. |
|||||||
| 0288 | Erg■n ErÓelebi | Preparing digital signal processing laboratory experiments on a DSP starter kit | 2014 Spring | Sadık Afşar, , , | |||
|
Title: Preparing digital signal processing laboratory experiments on a DSP starter kit Overview of the project
The completed project will be kept by the supervisor for further use. |
|||||||
| 0287 | Erg■n ErÓelebi | 3D video data generation | 2013 Fall | Mustafa Kara, , , | |||
|
Title: 3D video data generation Overview of the project
Specific components/tools: The completed project will be kept by the supervisor for further use. |
|||||||
| 0286 | Erg■n ErÓelebi | Wireless power transfer | 2013 Fall | Murat Suslu, , , | |||
|
Title: Wireless power transfer Overview of the project
Specific components/tools: The completed project will be kept by the supervisor for further use. |
|||||||
| 0285 | Erg■n ErÓelebi | Spectrum analyzer using dsPIC | 2014 Spring | Mehmet Sevim, , , | |||
|
Title: Spectrum analyzer using dsPIC Overview of the project
Specific components/tools: The completed project will be kept by the supervisor for further use. |
|||||||
| 0284 | Erg■n ErÓelebi | Robotic arm design | 2013 Fall | Said úiftci, , , | |||
|
Title: Robotic arm design Overview of the project
Specific components/tools: The completed project will be kept by the supervisor for further use. |
|||||||
| 0283 | Erg■n ErÓelebi | PIC based Temperature and humidity Monitoring on GSM | 2013 Fall | Elzem Misirli, , , | |||
|
Title: PIC based Temperature and humidity Monitoring on GSM Overview of the project
Specific components/tools: The completed project will be kept by the supervisor for further use. |
|||||||
| 0282 | Erg■n ErÓelebi | PLC based automated car parking | 2013 Fall | Utku Coşgun, Ezgi G■zelk■Ó■k, Ozan Kaya, | |||
|
Title: PLC based automated car parking Overview of the project
Specific components/tools: The completed project will be kept by the students to do with as they wish. |
|||||||
| 0281 | Celal Koraşlı | Negative ion generator and detector | 2013 Fall | S■leyman Barış Akg■nd■z, Ahmet Eren, , | |||
|
Title: Negative ion generator and detector Overview of the project The system must be sized and shaped to be used in a office room. Also the system automation using controller (PLC or a similar) is the prerequisite for the project. |
|||||||
| 0280 | Rauf Mirzababayev | Human heat as a light source. | 2013 Summer early | Elif KılıÓ, Eray KılıÓ, , | |||
|
Title: Human heat as a light source. Overview of the project |
|||||||
| 0279 | Rauf Mirzababayev | System for the measurement and display of acoustic noise level. | 2013 Fall | Yunus Duygu, Mahmut Ersin ErÓin, , | |||
|
Title: System for the measurement and display of acoustic noise level. Overview of the project |
|||||||
| 0278 | Vedat Karslı | Three dimensional controlling of a graphic figure drawn on the monitor of a PC with a data taken from a microcontroller through USB port. | 2013 Fall | Zuberi Chambali, Hashim Khamis, , | |||
|
Title: Three dimensional controlling of a graphic figure drawn on the monitor of a PC with a data taken from a microcontroller through USB port. Overview of the project The required components will be provided by supervisor. If the project is found to be very successful, a small prize will be given. The completed project will be kept by the supervisor for further use. |
|||||||
| 0277 | Tolgay Kara | False start detection via image processing for sprint races | 2013 Fall | Ali Ozan Akbey, Erhan Tekli, , | |||
|
Title: False start detection via image processing for sprint races Overview of the project Division of tasks:
|
|||||||
| 0276 | Tolgay Kara | Electronic false start detector for sprint races | 2013 Summer | Pınar úiftÓi, Batuhan Şenlen, Ahmet Turnalı, | |||
|
Title: Electronic false start detector for sprint races Overview of the project Division of tasks:
|
|||||||
| 0274 | Ahmet UÓar | Design PID Control for Position Control of AC motor | 2014 Spring | Mehmet Ekinci, InanÓ G—rg■n, H■seyin Mizmizlioğlu, | |||
|
Title: Design PID Control for Position Control of AC motor Overview of the project
Design overview
Apparatus/Tools prerequisite: EEE 352 The completed project will be kept by the supervisor for further use. |
|||||||
| 0273 | Ahmet Uçar | Observer Based State Feedback Position Control of a DC Motor | 2015 Fall | Anıl Erenkara, Arife Çakı, Salih Dağdur, | |||
|
Title: Observer Based State Feedback Position Control of a DC Motor Overview of the project
Construction overview
Design overview
Apparatus/Tools prerequisite: EEE 352 Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0272 | Ahmet Uçar | Complete State Feedback Position Control of a DC Motor by the pole placement method | 2015 Fall | Aykut Orak, Bedrettin Kanpak, Mohamed Zafir Mohamed Zubair, | |||
|
Title: Complete State Feedback Position Control of a DC Motor by the pole placement method Overview of the project
Construction overview
Design overview
Apparatus/Tools prerequisite: EEE 352 Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0271 | Ahmet Uçar | Control of a DC Motor based on Zeigler-Nichols Tuning Methods | 2015 Fall | Hasan Aslan, Barış Aşkın, Okan Büyüktepe, | |||
|
Title: Control of a DC Motor based on Zeigler-Nichols Tuning Methods Overview of the project
Construction overview
Design overview
Apparatus/Tools prerequisite: EEE 352 Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0270 | Ahmet Uçar | Design and Control of Inverted Pendulum on a Cart system | 2014 Fall | Yıldırım Can Akgünel, Gökhan Duru, Aykut Görkem Gelen, | |||
|
Title: Design and Control of Inverted Pendulum on a Cart system Overview of the project
Construction overview
Design overview prerequisite: EEE 352 Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0269 | Ahmet UÓar | Conventional Control of Magnetic Levitation System | 2013 Fall | Abdullahi Adamu, Emine úalman, Ertuğrul Sert, | |||
|
Title: Conventional Control of Magnetic Levitation System Overview of the project
Construction overview
Design overview
Apparatus/Tools prerequisite: EEE 352 The completed project will be kept by the supervisor for further use. |
|||||||
| 0268 | Ahmet Uçar | Design a platform to implement digital control for electromechanical systems. | 2016 Fall | Rabia Kucuk, Esra Gocer, Abide Gokce, | |||
|
Title: Design a platform to implement digital control for electromechanical systems. Overview of the project
Construction overview
Testing overview prerequisite: EEE 352 and EEE 456 Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0267 | Ahmet Uçar | Design a Data Acquisition (DAQ) System to be used with data Acquisition Toolbox and Instrument Control Toolbox of MATLAB/Simulink. | 2015 Fall | Meral Yıldırım, Kübra Yeniçeri, Oğuz Özdemir, | |||
|
Title: Design a Data Acquisition (DAQ) System to be used with data Acquisition Toolbox and Instrument Control Toolbox of MATLAB/Simulink. Overview of the project
Construction overview
Testing overview Financial note: The project budget may exceed 200 TL, in this case the students should consider obtaining additional financial support or take on a third student in the group. Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0266 | Ahmet Uçar | Design a Data Acquisition and Distribution System communicated with MATLAB/Simulink. | 2015 Fall | Neslihan Top, Mert Filiz, , | |||
|
Title: Design a Data Acquisition and Distribution System communicated with MATLAB/Simulink. Overview of the project
Construction overview
Testing overview Financial note: The project budget may exceed 200 TL, in this case the students should consider obtaining additional financial support or take on a third student in the group. Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0265 | Tolgay Kara | Electric circuit model of the human body | 2013 Summer | Mazlum Ferhat İnce, , , | |||
|
Title: Electric circuit model of the human body Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0264 | Vedat Karslı | A laser diode paper cutter controlled by a microcontroller. | 2013 Fall | Emre Eroğlu, Ali Telek, , | |||
|
Title: A laser diode paper cutter controlled by a microcontroller. Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0262 | Vedat Karslı | The use of a GPS module using a microcontroller | 2013 Summer early | Hasan YalÓın, Hazal Yılmaz, , | |||
|
Title: The use of a GPS module using a microcontroller Overview of the project
THE FOLLOWING ARE OPTIONAL The completed project will be kept by the supervisor for further use. |
|||||||
| 0261 | Vedat Karslı | Design and construction for a Quadcopter | 2013 Fall early | Mesut G■rg—z, D—nd■ úatal, Ahmet øks■z, | |||
|
Title: Design and construction for a Quadcopter Overview of the project
THE FOLLOWING ARE OPTIONAL
Division of tasks The completed project will be kept by the supervisor for further use. |
|||||||
| 0260 | Vedat Karslı | The use of gyroscope using a microcontroller | 2013 Fall | Muhittin Cevher, Emre Kesen, Mustafa Yavuz, | |||
|
Title: The use of gyroscope using a microcontroller Overview of the project The gyro information will be displayed on a display unit using a microcontroller. The completed project will be kept by the supervisor for further use. |
|||||||
| 0257 | Serkan øzbay | Design of a vending machine prototype | 2013 Summer early | Burak Oğuz Mızrak, Mehmet Vakıf Soydan, , | |||
|
Title: Design of a vending machine prototype Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0256 | Nuran Doğru | Pulse oximeter and heart rate meter | 2013 Summer early | Yusuf øzkaya, Duygu Şeker, , | |||
|
Title: Pulse oximeter and heart rate meter Overview of the project Principles: Oxygenated hemoglobin absorbs more infrared light and allows more red light to pass through. Deoxygenated hemoglobin absorbs more red light and allows more infrared light to pass through. The ratio of absorption at the two wavelengths can be used to determine the fraction of saturated hemoglobin. The measured signals can be also used to calculate the pulse rate as the expansion and contraction of blood vessels in the finger on each cycle of the heart causes a periodic variation in the measured signal amplitude. The project will be kept by the students to do with as they wish. |
|||||||
| 0255 | Tolgay Kara | A warning system for the deaf | 2013 Summer | Ertuğrul K—lemen, İhsan Şener, , | |||
|
Title: A warning system for the deaf Overview of the project Division of tasks:
|
|||||||
| 0254 | Serkan øzbay | Metal detector | 2013 Summer | Ahmet Serhat KırÓıl, Murat Bozgeyik, , | |||
|
Title: Metal detector Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0252 | Sema Kayhan | FPGA-based image processing | 2013 Summer early | Ufuk Ozer, Aksen Kilinc, , | |||
|
Title: FPGA-based image processing Overview of the project
Specific components/tools: The completed project may be kept by the student. |
|||||||
| 0248 | Vedat Karslı | Secure GSM relay activation | 2013 Summer early | Mustafa Ayhan, Muhammet Cihat Mumcu, , | |||
|
Title: Secure GSM relay activation Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0247 | Vedat Karslı | Data collection from 5 points to a central controller unit and PC display | 2014 Spring | Serkan Derin, Emre EkmekÓi, Anıl Saygılı, | |||
|
Title: Data collection from 5 points to a central controller unit and PC display Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0246 | Vedat Karslı | Design and construction of a bicycle electrical tyre-motor driver | 2013 Fall | H■seyin Polat, Altan Énl■, , | |||
|
Title: Design and construction of a bicycle electrical tyre-motor driver Overview of the project Note: The students should have great interest to power electronics applications. The completed project will be kept by the supervisor for further use. |
|||||||
| 0245 | Nuran Doğru | A UPS system | 2013 Spring | Nurettin Yiğit, Muhammet Furkan K■Ó■k, , | |||
|
Title: A UPS system Overview of the project Tasks will be divided between the two group members as follows:
The project will be kept by the students to do with as they wish. |
|||||||
| 0244 | Sema Kayhan | PLC controlled two axes ceiling crane | 2013 Spring | Mehmet Nur Cantaşdemir, ømer Fikri Duran, Devlet Yaşar, | |||
|
Title: PLC controlled two axes ceiling crane Overview of the project Tasks will be divided between the three group members as follows:
Estimated budget: 180-200 TL |
|||||||
| 0243 | Rauf Mirzababayev | LPG gas GSM alarm | 2013 Spring | Hanife Esra Kasap, Nafiz Oker, , | |||
|
Title: LPG gas GSM alarm Overview of the project
Division of tasks: |
|||||||
| 0242 | Erg■n ErÓelebi | Development of RGB LED PWM driver for high power LEDs (I) | 2013 Spring | ømer G■ner, , , | |||
|
Title: Development of RGB LED PWM driver for high power LEDs (I) Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0241 | Rauf Mirzababayev | Methane gas detector | 2013 Spring | Şahin Şıkoğlu, G—khan úelik, , | |||
|
Title: Methane gas detector Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0240 | Tolgay Kara | Autonomous rescue robot | 2013 Spring | Muhammet Berdici, İsmail Terzi, Mehmet Mete Yılmaz, | |||
|
Title: Autonomous rescue robot Overview of the project The robot should be able to:
Division of tasks:
|
|||||||
| 0239 | Arif Nacaroğlu | An autonomic robot | 2013 Fall | Zeynel Bay, Adnan Demir, Ahmet D■k■nl■, | |||
|
Title: An autonomic robot Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0238 | Tolgay Kara | An autonomic robot [I] | 2013 Spring | M■slime Altun, Ismail úetin, Mustafa KılıÓ, | |||
|
Title: An autonomic robot [I] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0237 | Savaş UÓk■n | Design and construction based on RFID | 2013 Spring | Mahmut úiÓek, , , | |||
|
Title: Design and construction based on RFID Overview of the project In this project the RFID and applications will be searched and a design and construction project will be suggested by the student. The specifications of the project will be discussed with the advisor and will be decided before project starts. |
|||||||
| 0235 | Celal Koraşlı | Extracting heat from underground power transmission cables | 2013 Spring | Hamit Orhan, Vedat Onatlı, , | |||
|
Title: Extracting heat from underground power transmission cables Overview of the project In this project, a simple heat extraction system is to be designed to achieve two aims:
|
|||||||
| 0234 | Andrew Beddall | An autonomic robot [group IV] | 2012 Fall | İbrahim Arslan, Ahmet Gevri, Mehmet Ali G■ll■, | |||
|
Title: An autonomic robot [group IV] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0233 | Taner İnce | Simple plotter (III) | 2012 Fall | Serkan KılıÓ, Şaban Koyuncu, , | |||
|
Title: Simple plotter (III) Overview of the project
Division of tasks: [link to example construction] |
|||||||
| 0232 | Tolgay Kara | Simple plotter (II) | 2012 Fall | Y■ksel Yeşilyurt, ømer G■ner, , | |||
|
Title: Simple plotter (II) Overview of the project
Division of tasks: [link to example construction] |
|||||||
| 0231 | Andrew Beddall | Simple plotter (I) | 2012 Fall | Eyyup B—l■kbaş, A. Hamdi KoÓ, , | |||
|
Title: Simple plotter (I) Overview of the project
Division of tasks: [link to example construction] |
|||||||
| 0230 | Celal Koraşlı | Design and construction of an electromagnetic device to aid bone fracture healing | 2012 Fall | G—khan Yılmaz, Soner Fidan, , | |||
|
Title: Design and construction of an electromagnetic device to aid bone fracture healing Overview of the project |
|||||||
| 0229 | Erg■n ErÓelebi | Implementation of GPS & GSM based Real Time Vehicle Tracking System (II) | 2012 Fall | Eray Bucak, Okan B—ge, , | |||
|
Title: Implementation of GPS & GSM based Real Time Vehicle Tracking System (II) Overview of the project The completed project will be kept by the student. |
|||||||
| 0228 | Savaş UÓk■n | Prepare a program for the design of multisection Chebyshev transformers (II) | 2012 Fall | Veysel G■zel, , , | |||
|
Title: Prepare a program for the design of multisection Chebyshev transformers (II) Overview of the project In this project the properties of Chebyshev polynomials will be searched and a program will be prepared to design a three-section Chebyshev transformer for different specifications. The specifications (load and transmission line impedances, reflection coefficient ext.) will be given by the advisor. Plot of reflection coefficient magnitude versus normalized frequency for exact designs using 1,2,3, and 4 sections should be obtained and discussed. Pre-requisite: EEE361 |
|||||||
| 0227 | Rauf Mirzababayev | Design and construction of a Hydrogen gas detector (I) | 2012 Fall | Yakup B■y■kbayram, G—kcan Duman, , | |||
|
Title: Design and construction of a Hydrogen gas detector (I) Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0226 | Rauf Mirzababayev | Passive alarm device (I) | 2012 Fall | K■rşad G■ler, , , | |||
|
Title: Passive alarm device (I) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0225 | Nuran Doğru | A robot pushing a table tennis ball up a slope (II) | 2012 Fall | Veysi Aydın, Onur Guneş, , | |||
|
Title: A robot pushing a table tennis ball up a slope (II) Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0224 | Nurdal Watsuji | FM radio receiver controlled by a micro-controller (II) | 2012 Fall | Ahmet Binol, Hasan Kalay, , | |||
|
Title: FM radio receiver controlled by a micro-controller (II) Overview of the project
Micro-controller, FM receiver, keypad, LCD, antenna |
|||||||
| 0223 | G—lge øğ■c■ | Attendance via wireless (II) | 2012 Fall | Zehra Yiğit, Belma Fergar, , | |||
|
Title: Attendance via wireless (II) Overview of the project The system will be started by the lecturer. Then the students in the class will "sign" the attendance at their desk. The system at the desk may be a microprocessor circuit. This circuit should allow only one student to enter his/her information. After that this information will be transmitted to a central unit at the lecturer's desk. The system should provide the following:
The completed project will be donated to the department for display or lab. |
|||||||
| 0220 | Sema Kayhan | Implementation of digital watermarking algorithm using FPGA | 2012 Fall | ønder Polat, , , | |||
|
Title: Implementation of digital watermarking algorithm using FPGA Overview of the project
Apparatus/Tools: FPGA board and required software tools. |
|||||||
| 0219 | Andrew Beddall | Remote home monitoring and control over the Internet | 2012 Fall | Birol Ilker Arslan, Ramazan Sevim, Turgut Karadağ, | |||
|
Title: Remote home monitoring and control over the Internet Overview of the project Home conditions including:
Division of the tasks:
Estimated Budget: Up to 300 TL (Depends on whether we construct our DCC or use arduino) The completed project will be kept by the students |
|||||||
| 0218 | Vedat Karslı | Data collection from multiple points to a central controller unit and PC display (I) | 2012 Fall | Ahmet Korkmaz, Sibel Kaya, , | |||
|
Title: Data collection from multiple points to a central controller unit and PC display (I) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0217 | Vedat Karslı | Collecting and storing GPS position information on a PC | 2012 Fall | Aykut Kaşkaya, Asım Can Hosgun, , | |||
|
Title: Collecting and storing GPS position information on a PC Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0216 | Vedat Karslı | Data collection from multiple points to a central controller unit and PC display (II) | 2012 Fall | Ferhat Doğan, Nur úeker, , | |||
|
Title: Data collection from multiple points to a central controller unit and PC display (II) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0215 | Sema Kayhan | A PLC controlled sorting system | 2012 Fall | Selim Emre G■nay, Koray Şaban, , | |||
|
Title: A PLC controlled sorting system Overview of the project Specific components/tools: PLC, camera, DC motor, Matlab The completed project will be kept by the students to do with as they wish.. |
|||||||
| 0214 | Erg■n ErÓelebi | Improvement in supervisory control and data acquisition system for liquid tanks | 2012 Fall | Yunus Doğan, , , | |||
|
Title: Improvement in supervisory control and data acquisition system for liquid tanks Overview of the project The completed project will be kept by the student. |
|||||||
| 0213 | Erg■n ErÓelebi | Converting from text to speech | 2013 Spring | Hasan Elmaoğlu, , , | |||
|
Title: Converting from text to speech Overview of the project The completed project will be kept by the student. |
|||||||
| 0212 | Erg■n ErÓelebi | Control of a railway system | 2012 Fall | Emre øzkorkmaz, Ali Z■lfikaroğlu, , | |||
|
Title: Control of a railway system Overview of the project The completed project will be kept by the student. |
|||||||
| 0211 | Erg■n ErÓelebi | Design and Implementation of PLC controlled pneumatic arm for material handling | 2012 Fall | Yunus úetin, Semih YavuzkılıÓ, Tayfun úelik, | |||
|
Title: Design and Implementation of PLC controlled pneumatic arm for material handling Overview of the project Specific components/tools: PLC, Single-phase induction motor, conveyer belt, 24 V DC Source, IR sensor, ON-OFF buttons. The completed project will be kept by the student. |
|||||||
| 0210 | Erg■n ErÓelebi | Design and Implementation of PLC based automatic bottle filling station | 2013 Spring | S■leyman Aslan, Mustafa øzdemir, , | |||
|
Title: Design and Implementation of PLC based automatic bottle filling station Overview of the project As a result of project, students will have the opportunity to develop themselves in industrial automation. Specific components/tools: PLC, 24V DC Relay, 220V AC Relay, Sensor Solenoid valve, Single-phase induction motor, conveyer belt, 24 V DC Source, ON-OFF buttons. The completed project will be kept by the student. |
|||||||
| 0209 | Erg■n ErÓelebi | Implementation of GPS & GSM based Real Time Vehicle Tracking System (I) | 2012 Fall | İzzettin úifteg—z, Yaşar Ayyıdız, , | |||
|
Title: Implementation of GPS & GSM based Real Time Vehicle Tracking System (I) Overview of the project The completed project will be kept by the student. |
|||||||
| 0208 | Serkan øzbay | Design of an actuator driven by servomotor | 2012 Fall | Menekşe Dursun, øzkan Alkış, , | |||
|
Title: Design of an actuator driven by servomotor Overview of the project This project is intended to develop a servomotor-driven actuator which is to be utilized for dynamic loading tests on geomaterials. It is specifically designed as a part of laboratory testing facilities for soil materials. The actuator is used to model and simulate the harmonic ground motion that occurs during earthquake shaking. The actuator will be computer controlled. The system will have a user interface that makes the automation with a software. Automation includes controlling the servomotor operation (up and down movement) and reading a transducer measurement. Electronic transducer already exists just computer programming is needed for interaction between servomotor operation and measurement process. Tasks: Preliminary research, Servomotor and complementary parts selection, Construction, Interface design, Programming, Construction, Implementation. The completed project will be kept by the supervisor for further use. |
|||||||
| 0207 | Sadettin øzyazıcı | Design of FM remote transmitter and receiver (II) | 2012 Fall | Sedat Demir, Eray Hazer, , | |||
|
Title: Design of FM remote transmitter and receiver (II) Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0206 | Nurdal Watsuji | FM radio receiver controlled by a micro-controller (I) | 2012 Fall | Soner Kısak■rek, Ahmet Giray Yıldırım, , | |||
|
Title: FM radio receiver controlled by a micro-controller (I) Overview of the project
Micro-controller, FM receiver, keypad, LCD, antenna |
|||||||
| 0205 | G—lge øğ■c■ | Attendance via wireless (I) | 2012 Fall | Doğuş Bayır, Abdurrahim Bavli, , | |||
|
Title: Attendance via wireless (I) Overview of the project The system will be started by the lecturer. Then the students in the class will "sign" the attendance at their desk. The system at the desk may be a microprocessor circuit. This circuit should allow only one student to enter his/her information. After that this information will be transmitted to a central unit at the lecturer's desk. The system should provide the following:
The completed project will be donated to the department for display or lab. |
|||||||
| 0204 | Rauf Mirzababayev | Design and construction of a Hydrogen gas detector (II) | 2012 Fall | Muhammet K■rşat Eroğlu, Ozan Gani Tattan, , | |||
|
Title: Design and construction of a Hydrogen gas detector (II) Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0203 | Rauf Mirzababayev | Passive alarm device (II) | 2012 Fall | Mehmet Karadağ, , , | |||
|
Title: Passive alarm device (II) Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0202 | Serkan øzbay | Eye tracking system | 2012 Fall | Adam Iddi M Watima, Zuberi Juma Ramadhan, , | |||
|
Title: Eye tracking system Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0201 | Serkan øzbay | Vacant parking space detection | 2012 Fall | Emre Işık, , , | |||
|
Title: Vacant parking space detection Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0200 | Sema Kayhan | A real-time human tracking and security system in the home environment | 2012 Fall | Cansu Kınalı, Adem İnce, , | |||
|
Title: A real-time human tracking and security system in the home environment Overview of the project Specific components/tools: Camera, servo motor, matlab software. The completed project will be kept by the students to do with as they wish.. |
|||||||
| 0199 | Savaş UÓk■n | VIP Parking Management System using RFID | 2012 Fall | Şafak G■naydın, Ezgi Kırmızı, , | |||
|
Title: VIP Parking Management System using RFID Overview of the project In this project the RFID and applications will be searched and a design and construction project will be suggested by the students. The specifications of the project will be discussed with the advisor and will be decided at the beginning of the project. Choosen topic: VIP Parking Management System using RFID Pre-requisite: EEE361 |
|||||||
| 0198 | Savaş UÓk■n | Prepare a program for the design of multisection Chebyshev transformers (I) | 2012 Fall | İlyas Kara, , , | |||
|
Title: Prepare a program for the design of multisection Chebyshev transformers (I) Overview of the project In this project the properties of Chebyshev polynomials will be searched and a program will be prepared to design a three-section Chebyshev transformer for different specifications. The specifications (load and transmission line impedances, reflection coefficient ext.) will be given by the advisor. Plot of reflection coefficient magnitude versus normalized frequency for exact designs using 1,2,3, and 4 sections should be obtained and discussed. Pre-requisite: EEE361 |
|||||||
| 0196 | Sadettin øzyazıcı | Design and construction of an standalone GPS receiver | 2012 Fall | Nurullah Acıkg—z, , , | |||
|
Title: Design and construction of an standalone GPS receiver Overview of the project The completed project will be kept by the student. |
|||||||
| 0195 | Sadettin øzyazıcı | Design and construction of ultrasonic anemometry | 2012 Fall | ømer Uğun, Resul Pısıl, , | |||
|
Title: Design and construction of ultrasonic anemometry Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0194 | Sadettin øzyazıcı | Design of FM remote transmitter and receiver (I) | 2012 Fall | G—khan øzerli, Ahmet Nalbantoğlu, , | |||
|
Title: Design of FM remote transmitter and receiver (I) Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0192 | Ahmet Uçar | Design and control of a ball on a beam balancer system | 2014 Fall | Ömer Aydin, Kemal Karpınar, Ahmet Kural, Ercan Macit | |||
|
Title: Design and control of a ball on a beam balancer system Overview of the project
Construction overview
Design overview
Apparatus/Tools Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0190 | Ahmet UÓar | Conventional continuous time control of a magnetic levitation system | 2012 Fall | Adamu Abdulllahı, H■seyin KılıÓ, Turgut KoÓ, | |||
|
Title: Conventional continuous time control of a magnetic levitation system Overview of the project
Construction overview
Design overview
Apparatus/Tools The completed project will be kept by the supervisor for further use. |
|||||||
| 0189 | Ahmet UÓar | Speed control of an AC motor | 2014 Spring | Mustafa Kalkan, Harun Y■kcel, , | |||
|
Title: Speed control of an AC motor Overview of the project
Tasks
Apparatus/Tools The completed project will be kept by the supervisor for further use. |
|||||||
| 0188 | Ahmet UÓar | Position control of an AC motor | 2012 Fall | Tamer Karag—z, Enes KoÓ, , | |||
|
Title: Position control of an AC motor Overview of the project
Tasks
Apparatus/Tools The completed project will be kept by the supervisor for further use. |
|||||||
| 0187 | Ahmet Uçar | Observer-based state feedback position control of a DC motor: The observer and controller gains design by the pole placement method | 2016 Fall | Gamze Cirit, Meryem Sila Ozdemir, Sinem Ekin Sahin, | |||
|
Title: Observer-based state feedback position control of a DC motor: The observer and controller gains design by the pole placement method Overview of the project
Construction overview (two students)
Design overview (two students)
Apparatus/Tools Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0186 | Ahmet Uçar | Digital control of a DC motor | 2015 Fall | Yusuf Güngör, Onur Kırat, , | |||
|
Title: Digital control of a DC motor Overview of the project
Construction overview
Design overview
Apparatus/Tools prerequisite: EEE 352 and EEE 456 Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0185 | Ahmet Ucar | Full state feedback position control of a DC motor: the controller gains design by the pole placement method | 2016 Spring | Edibe Eda Bingol, Emine Bilgili, , | |||
|
Title: Full state feedback position control of a DC motor: the controller gains design by the pole placement method Overview of the project
Construction overview
Design overview
Apparatus/Tools Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0184 | Ahmet Uçar | Position control of a DC motor: PID control parameter design based on Zeigler-Nichols tuning rules | 2016 Spring | Ismail Turk, Mustafa Cabuk, , | |||
|
Title: Position control of a DC motor: PID control parameter design based on Zeigler-Nichols tuning rules Overview of the project
Construction overview
Design overview
Apparatus/Tools Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0183 | Ahmet Uçar | Position control of a DC motor: control parameter design by the frequency response method | 2015 Spring | Mustafa Yıldız, Hüseyin Kılıç, , | |||
|
Title: Position control of a DC motor: control parameter design by the frequency response method Overview of the project
Construction overview
Design overview
Apparatus/Tools Collaboration with the supervisor is very important in this project. Students are encouraged to visit the supervisor frequently. The supervisor will require "80% attendance", failure to reach this target by an individual student will result in a grade of N/A for that student. The completed project will be kept by the supervisor for further use. |
|||||||
| 0182 | Ahmet UÓar | Position control of a DC motor: control parameter design by the root locus method | 2013 Spring | Hasan Gezginci, Bilal øztekin, , | |||
|
Title: Position control of a DC motor: control parameter design by the root locus method Overview of the project
Construction overview
Design overview
Apparatus/Tools The completed project will be kept by the supervisor for further use. |
|||||||
| 0181 | Nuran Doğru | A robot pushing a table tennis ball up a slope (I) | 2012 Fall | Mehmet Ali G■ner, Sedat G—ksel, , | |||
|
Title: A robot pushing a table tennis ball up a slope (I) Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0180 | Tolgay Kara | A multi-robot system with wireless communication | 2012 Fall | Batuhan øzetin, Muharrem BaÓ, , | |||
|
Title: A multi-robot system with wireless communication Overview of the project Tasks:
The completed project kept by the supervisor for further use. |
|||||||
| 0179 | Tolgay Kara | Arm-controlled two-link planar manipulator | 2012 Fall | Arif Peker, Sedat Uğuş, , | |||
|
Title: Arm-controlled two-link planar manipulator Overview of the project Tasks:
The completed project kept by the supervisor for further use. |
|||||||
| 0178 | Tolgay Kara | Design of a control unit for unmanned air vehicle (UAV) | 2012 Spring | Mustafa Yağmur, , , | |||
|
Title: Design of a control unit for unmanned air vehicle (UAV) Overview of the project Tasks:
Estimated cost: 400 TL |
|||||||
| 0177 | Savaş UÓk■n | RFID gate entry system | 2012 Spring | Cihan Nişancı, Eda T■rkan, , | |||
|
Title: RFID gate entry system Overview of the project Divisions of Task:
Apparatus: radio frequency interface, transmitter, circuit components and pass cards. Estimated Budget:150-200 TL The completed project will be kept by the students. |
|||||||
| 0176 | Berrin Susluoğlu | Spinning LED display | 2012 Spring | H■seyin Aksu, , , | |||
|
Title: Spinning LED display Overview of the project |
|||||||
| 0175 | Arif Nacaroğlu | Information transmission by laser | 2012 Spring | Figen úoban, , , | |||
|
Title: Information transmission by laser Overview of the project Project Steps:
|
|||||||
| 0174 | Tolgay Kara | Development of a flex sensor glove | 2012 Spring | øzlem Ağg■l, Elif Y—ndem, , | |||
|
Title: Development of a flex sensor glove Overview of the project Cost: not exceeding 100 TL per student. |
|||||||
| 0173 | Nuran Doğru | Line Following Robot | 2012 Spring | Murat Keskin, , , | |||
|
Title: Line Following Robot Overview of the project The completed project will be kept by the student to do with as he/she wishes. |
|||||||
| 0172 | Serkan øzbay | Color sensor | 2012 Spring | øzcan Bulut, Seyithan Babayiğit, , | |||
|
Title: Color sensor Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0171 | Arif Nacaroğlu | Solar heated power generator | 2012 Spring | Orhan Karakoyun, Halil D■ndar, , | |||
|
Title: Solar heated power generator Overview of the project The students will provide no more that 100 TL each towards the cost of the project. The remaining funding will be provided by sponsers. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0170 | Arif Nacaroğlu | 3-D shape identifier | 2012 Spring | Selda Énsever, , , | |||
|
Title: 3-D shape identifier Overview of the project In the system, a MATLAB program will be designed The completed project will be kept by the students to do with as they wish. |
|||||||
| 0169 | Serkan øzbay | Gas detection system | 2012 Spring | Makbule úelebi, , , | |||
|
Title: Gas detection system Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0168 | Sema Kayhan | Design of conveyor system using SCADA | 2012 Spring | Musa Başad Metin, , , | |||
|
Title: Design of conveyor system using SCADA Overview of the project Specific components/tools: A PLC and SCADA program, DC motors, sensors, pump. The completed project will be kept by the students to do with as they wish.. |
|||||||
| 0167 | G—lge øğ■c■ | Wireless optical transceiver | 2012 Spring | ømer Ekici, Aykin Arifoğlu, , | |||
|
Title: Wireless optical transceiver Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0166 | Tolgay Kara | A proximity detector for the blind | 2012 Spring | Abdullah Bilbay, , , | |||
|
Title: A proximity detector for the blind Overview of the project Cost: not exceeding 100 TL The completed project will be kept by the student |
|||||||
| 0165 | G—lge øğ■c■ | Underwater communication by ultrasound | 2012 Spring | Mehmet Can Gezer, İsmail G■n, , | |||
|
Title: Underwater communication by ultrasound Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0164 | Rauf Mirzababayev | Digital voltmeter for analog voltage measurement | 2012 Spring | Serkan Atay, İbrahim Demirkıran, , | |||
|
Title: Digital voltmeter for analog voltage measurement Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0163 | Serkan øzbay | Early fire detection system | 2012 Spring | Nurettin ErÓin, , , | |||
|
Title: Early fire detection system Overview of the project The completed project will be kept by the student to do with as they wish. |
|||||||
| 0162 | Erg■n ErÓelebi | Remote-controlled target strike | 2012 Spring | Yasin İpekoğlu, , , | |||
|
Title: Remote-controlled target strike Overview of the project Sections:
The completed project will be kept by the student |
|||||||
| 0161 | Andrew Beddall | Bicycle speedometer | 2012 Spring | Nasır Y■ksel, İlker Bayrakcı, , | |||
|
Title: Bicycle speedometer Overview of the project Special features include:
The completed project will be kept by the students |
|||||||
| 0160 | Serkan øzbay | Message display system | 2012 Spring | Yasin G—r, Arif Duramaz, , | |||
|
Title: Message display system Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0159 | Nuran Doğru | Patient monitor | 2012 Fall | İlknur Tuzlupınar, Nuri úamlıbel, , | |||
|
Title: Patient monitor Overview of the project The completed project will be kept by the student to do with as he/she wishes. |
|||||||
| 0158 | Sadettin øzyazıcı | Design and construction of ultrasonic anemometry II | 2012 Spring | İbrahim Isık, Ertuğrul øzkan, , | |||
|
Title: Design and construction of ultrasonic anemometry II Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0157 | Sadettin øzyazıcı | A microcontroller based CO2 meter II | 2012 Spring | Sami Arslan, Mustafa Suat Aydın, , | |||
|
Title: A microcontroller based CO2 meter II Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0156 | Serkan øzbay | Handicapped person\caretaker communication system | 2012 Spring | Mesut T■rk, , , | |||
|
Title: Handicapped person\caretaker communication system Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0155 | Sema Kayhan | Design of Home Security System (HSS) | 2012 Spring | Mesut Şahan, Seyhan Ayata, , | |||
|
Title: Design of Home Security System (HSS) Overview of the project |
|||||||
| 0154 | Sema Kayhan | A PLC-controlled ball in a labyrinth | 2012 Spring | İbrahim Hakkı Kayserilioğlu, Murat Oğuzhan Durucan, , | |||
|
Title: A PLC-controlled ball in a labyrinth Overview of the project
Division of tasks: The completed project will be kept by the students to do with as they wish.. |
|||||||
| 0153 | Rauf Mirzababayev | pH meter | 2012 Spring | İdris G■ler, Nurullah Albayrak, , | |||
|
Title: pH meter Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0152 | Rauf Mirzababayev | Electronic thermometer | 2012 Spring | Faruk Avcu, Murat úelikkaleli, , | |||
|
Title: Electronic thermometer Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0151 | Rauf Mirzababayev | pH meter | 2012 Spring | Muhammed K■Ó■k, H■seyin Fatih S—ğ■t, , | |||
|
Title: pH meter Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0150 | Rauf Mirzababayev | Solar heater | 2012 Spring | Can KaÓan, Sedat Kazaylek, , | |||
|
Title: Solar heater Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0149 | Nurdal Watsuji | Shoe pace monitor | 2012 Spring | Emre Hadımoğulları, Serdar Yılıdrım, , | |||
|
Title: Shoe pace monitor Overview of the project [Note: the distance of each step will be larger for jogging than walking, so the system needs to know which mode it is in - this can be a switch on the monitor or maybe auto sensed by looking at the amplitude of the accelerometer signal] Division of tasks:
The completed project will be kept by the students |
|||||||
| 0148 | Erg■n ErÓelebi | Design and construction of a stair-climbing robot | 2012 Spring | Ferhat øzkınacı, Burak İlhan, , | |||
|
Title: Design and construction of a stair-climbing robot Overview of the project The completed project will be kept by the students. |
|||||||
| 0147 | Erg■n ErÓelebi | PIC based solar tracking system using stepper motors | 2012 Spring | ømer Mete Atalay, H■seyin Korkmaz, , | |||
|
Title: PIC based solar tracking system using stepper motors Overview of the project
Specific components/tools: The completed project will be kept by the supervisor for further use. |
|||||||
| 0146 | Erg■n ErÓelebi | Development of RGB LED PWM driver for high power LEDs (II) | 2013 Spring | Mert Cemal úağlar, , , | |||
|
Title: Development of RGB LED PWM driver for high power LEDs (II) Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0145 | Erg■n ErÓelebi | Improvement of a machine for inspection of textile defects | 2012 Spring | Yusuf B■y■kdere, Ali G■Ó, , | |||
|
Title: Improvement of a machine for inspection of textile defects Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0144 | Erg■n ErÓelebi | Supervisory control and data acquisition system for liquid tanks | 2012 Spring | Mustafa Bazdoğan, Ahmet Mert Sevgili, , | |||
|
Title: Supervisory control and data acquisition system for liquid tanks Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0143 | Savaş UÓk■n | Design and test a three-Section half-wave bandpass filter | 2012 Spring | Ahmet Hamdi Başg—zl■, , , | |||
|
Title: Design and test a three-Section half-wave bandpass filter Overview of the project Design a filter with a center frequency of 10 GHz, a bandwidth of 1 GHz and have a passband tolerance k2 = 0.1 which gives a maximum VSWR equal to 1.863. The correctness of design must be tested, the method of testing should be decided by the student. The study should also be presented in paper format. The completed project will be kept by the student. |
|||||||
| 0142 | Savaş UÓk■n | Design and test a two-section half-wave filter | 2012 Spring | Abdurrahman G—nenÓ, , , | |||
|
Title: Design and test a two-section half-wave filter Overview of the project A two-section half-wave filter with a 5 percent bandwidth and a passband tolerance k2 = 0.2. The frequency of operation is 5 GHz. The filter uses 50-Ω transmission lines. Specify the three required gap capacitances. Draw power transmission coefficient. The correctness of design must be tested, the method of testing should be decided by the student. The study should also be presented in paper format. The completed project will be kept by the student. |
|||||||
| 0141 | Nuran Doğru | Digital Thermometer | 2012 Spring | Ahmet øzkan, Murat BayÓelebi, , | |||
|
Title: Digital Thermometer Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0140 | Andrew Beddall | Random number circuit | 2012 Spring | Muhammed Emin Piran, Merve Demirici, , | |||
|
Title: Random number circuit Overview of the project |
|||||||
| 0139 | Sadettin øzyazıcı | A microcontroller based CO2 meter | 2012 Spring | Cihan L■tfı Akmil, Salih Lafcı, , | |||
|
Title: A microcontroller based CO2 meter Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0138 | Sadettin øzyazıcı | Design and construction of ultrasonic anemometry | 2012 Spring | Emir Karaaslan, Mehmet Serkan UzunÓam, , | |||
|
Title: Design and construction of ultrasonic anemometry Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0136 | Tolgay Kara | A wearable multisensor device for vital signals | 2012 Fall | İbrahim úelebi, Kazım Demir, Tahsin øzden, | |||
|
Title: A wearable multisensor device for vital signals Overview of the project Divison of tasks: 1. Sensor selection, design and construction The completed project will be kept by the superivisor for further use. |
|||||||
| 0135 | Nuran Doğru | Liquid level control system for an array of tanks | 2011 Fall | Ekrem Seyfullah Ağcabay, Taner Aribaş, , | |||
|
Title: Liquid level control system for an array of tanks Overview of the project The tasks are divided as follows:
Estimated project cost: 150 TL The completed project will be kept by the students to do with as they wish. |
|||||||
| 0134 | Taner İnce | An autonomic robot [group III] | 2012 Fall | Bayram Karahan, Orhan G■nd■z, Ercan Virdil, | |||
|
Title: An autonomic robot [group III] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0133 | Tolgay Kara | An autonomic robot [group II] | 2012 Fall | Şevket Şimşek, Alişan KekeÓ, Serdar Yeşil, | |||
|
Title: An autonomic robot [group II] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0132 | Andrew Beddall | An autonomic robot [group I] | 2012 Fall | S■leyman Demir, Gizem Karahan, , | |||
|
Title: An autonomic robot [group I] Overview of the project
Specific conditions:
This is a GPC proposed project to be performed by more than one group. |
|||||||
| 0131 | Tolgay Kara | Bomb disposal robot | 2011 Fall | Ali SelÓuk, Haydar G■reli, , | |||
|
Title: Bomb disposal robot Overview of the project The electronic card and motor driver card will be designed, the motor driver card. An RF unit will be bought. A minimum 12V 8Amp battery will be required to supply the machine for microcontroller. A power 5V power regulator will be designed. Finally a remote controller control card will be designed having many buttons and a joystick to control the robot and arm. If enough time is available a PC will be integrated into the control.
Division of tasks
Financial support: The completed project will be kept by the student/funding body.. |
|||||||
| 0130 | Rauf Mirzababayev | Distance measurements using the ultrasound waves | 2011 Fall | Hakan Derecik, , , | |||
|
Title: Distance measurements using the ultrasound waves Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0129 | Sema Kayhan | PLC training kit | 2011 Fall | Mahmut Tatar, , , | |||
|
Title: PLC training kit Overview of the project A student PLC training kit will be designed and constructed for use in the undergraduate laboratory. In this project electronic devices for input and output will be placed on a board such that the outputs will be clearly seen. The board will contain sensors or switches as input and some devices such as LEDs or motors as output. Software for controlling input and output will be prepared on a computer and downloaded to a PLC. Apparatus/tools: PLC, sensors, relays, DC motors,LEDs, switches. The completed project will be donated to an undergraduate lab.. |
|||||||
| 0128 | Sema Kayhan | Intelligent Home System-Control by PLC/PIC | 2011 Fall | Derya İnce, , , | |||
|
Title: Intelligent Home System-Control by PLC/PIC Overview of the project
Tasks: Apparatus/tools: PLC/PIC, RS-232 converter, RF system, ledS, DC motor, Matlab or Visual Basic or any other appropriate programming language. The completed project will be kept by the student to do with as he/she wishes.. |
|||||||
| 0127 | Sema Kayhan | Metal detector robot with mechanical sensing switches | 2011 Fall | Semih Yıluğur, Adem Taşın, , | |||
|
Title: Metal detector robot with mechanical sensing switches Overview of the project Apparatus/tools: Power supply, PLC, sensors, DC motors. The completed project will be kept by the students to do with as they wish |
|||||||
| 0126 | Celal Koraşlı | Speed and directional control of a hovercraft | 2012 Spring | ønder Şahinoğullarıgil, Mehmet úekl■, , | |||
|
Title: Speed and directional control of a hovercraft Overview of the project
Division of tasks: Specific components/tools: Series motor, chargable 12 or 24V battery The completed project will be kept by the supervisor for further use. |
|||||||
| 0125 | Vedat Karslı | Controlling of a servo motor forward and backward by way of a PC | 2012 Fall | Yunus Emre Baygeldi, Mehmet G■ney, M. Mert Alag—z, | |||
|
Title: Controlling of a servo motor forward and backward by way of a PC Overview of the project Students should be eager to learn and develop new things. They will share different parts of the system between themselves.
Specific components/tools The completed project will be kept by the supervisor for further use. 1Important note: the supervisor requires the student(s) to give full guaranty against damage of the servo motor, drive unit, and PC (because they are very expensive tools). |
|||||||
| 0124 | Rauf Mirzababayev | Intrusion control | 2011 Fall | Seyhan Tural, Levent Kızıl, , | |||
|
Title: Intrusion control Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0123 | Rauf Mirzababayev | Local cooler for desert places | 2011 Fall | Saadet G■ls■m AÓıkg—z, Sevilay Akca, , | |||
|
Title: Local cooler for desert places Overview of the project Specific components/tools: solar cell, Peltier tablet. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0122 | Vedat Karslı | A remote-control security toy car by PC | 2011 Fall | Taha Emre T■mt■rk, , , | |||
|
Title: A remote-control security toy car by PC Overview of the project Main devices: toy car, wireless camera, RF units sender and receiver, microcontroller, DC motor, RS-232 connecter The completed project will be kept by the student to do with as he/she wishes.. |
|||||||
| 0121 | Savaş UÓk■n | Design a branch-line directional coupler in stripline form | 2011 Fall | Yakup Karataş, , , | |||
|
Title: Design a branch-line directional coupler in stripline form Overview of the project The study should also be presented in paper format. PREREQUISITE: EEE361 The completed project will be donated to the department for display or lab. |
|||||||
| 0120 | Serkan øzbay | Microcontroller-based combination lock for multiusers | 2011 Fall | Kadir Kaynar, , , | |||
|
Title: Microcontroller-based combination lock for multiusers Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0119 | Serkan øzbay | Anti-sleep driving alarm system | 2011 Fall | Yavuz Barutcu, H■seyin Toprak, , | |||
|
Title: Anti-sleep driving alarm system Overview of the project The completed project will be kept by the supervisor for further use. |
|||||||
| 0118 | Sadettin øzyazıcı | Internet radio | 2011 Fall | Ahmet Atam, İsmail øzen, , | |||
|
Title: Internet radio Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0117 | Sadettin øzyazıcı | Wireless pulse sensor | 2011 Fall | Samat Turdumamatov, Aliser Abdulhayev, , | |||
|
Title: Wireless pulse sensor Overview of the project The completed project will be donated to the department for display or lab. |
|||||||
| 0116 | Erg■n ErÓelebi | Improvement in design and construction of a machine for inspection of textile defects | 2011 Fall | øzkan Sarikaya, Kemal Arslan, Emrah Yilmaz, | |||
|
Title: Improvement in design and construction of a machine for inspection of textile defects Overview of the project Division of tasks:
|
|||||||
| 0115 | Erg■n ErÓelebi | Improvement of a pistachio sorting machine | 2011 Fall | G■lsemin Ésen, Kader Temel, , | |||
|
Title: Improvement of a pistachio sorting machine Overview of the project Division of tasks:
|
|||||||
| 0112 | Ahmet UÓar | Speed control of an AC motor | 2012 Spring | úağrı G—kahmetoğlu, Muhittin Metin, , | |||
|
Title: Speed control of an AC motor Overview of the project Division of tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0111 | Ahmet UÓar | Position control of a DC motor | 2011 Fall | Tuğba Bozdoğan, K■bra Şeker, , | |||
|
Title: Position control of a DC motor Overview of the project Division of tasks:
The completed project will be kept by the supervisor for further use. |
|||||||
| 0110 | Sema Kayhan | A speech controlled car | 2011 Summer | Emrah Irmak, Mehmet G—kÓe, , | |||
|
Title: A speech controlled car Overview of the project Division of tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0109 | Tolgay Kara | Hearing protection with variable frequency active noise reduction | 2011 Fall | Adem Dokg—zl■, Yavuz Selim Ağzıbağlı, , | |||
|
Title: Hearing protection with variable frequency active noise reduction Overview of the project Division of tasks:
The completed project will be donated to the department for display or lab. |
|||||||
| 0107 | Vedat Karslı | Speed measurement of a rotational induction motor | 2011 Fall | Meral Aslan, , , | |||
|
Title: Speed measurement of a rotational induction motor Overview of the project
Specific components/tools The completed project will be kept by the supervisor for further use. |
|||||||
| 0106 | Nuran Doğru | PC to PC fiber optic communication | 2011 Summer | Mehmet Ali Ést■ner, Hasan İzmitligil, , | |||
|
Title: PC to PC fiber optic communication Overview of the project One student will design and construct the hardware (transmitter and receiver) while the other will develop the software to test the hardware. The completed project will be kept by the students to do with as they wish. |
|||||||
| 0105 | Tolgay Kara | Electronic assistant football referee to detect off-side | 2011 Spring | Faruk BahÓeci, , , | |||
|
Title: Electronic assistant football referee to detect off-side Overview of the project The completed project will be kept by the student to do with as he wishes. |
|||||||
| 0104 | Rauf Mirzababayev | Gas leak detector | 2011 Spring | Mustafa Arslan, Mehmet Şahan, , | |||
|
Title: Gas leak detector Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0103 | Rauf Mirzababayev | Combustion products detector | 2011 Spring | Sinan Seven, Rıdvan Aslan, , | |||
|
Title: Combustion products detector Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0102 | Savaş UÓk■n | Design of Multisection Chebyshev Transformers | 2011 Spring | Burak K—se, , , | |||
|
Title: Design of Multisection Chebyshev Transformers Overview of the project In this project the properties of Chebyshev polynomials will be searched and a multisection (two or/and three-section) Chebyshev transformers will be designed for different specifications. The specifications (load and transmission line impedances, maximum VSWR that can be tolerated, fractional bandwidth ext.) will be given by the advisor. Plot of ρ versus f should be obtained and discussed. |
|||||||
| 0100 | Vedat Karslı | Design and construction of a prototype levitation control system using dsPIC30F4011 | 2012 Fall | Şeyda Sağır, Serhat Tulu, , | |||
|
Title: Design and construction of a prototype levitation control system using dsPIC30F4011 Overview of the project Apparatus/Tools Semiconductor devices, dsPIC30F4011, display unit, sensors, linear ICs, Matlab. The completed project will be kept by the supervisor for further use. |
|||||||
| 0099 | Sema Kayhan | Visual tracking system | 2011 Spring | Selami Gemalmaz, Bilgi Ozan Aky■z, , | |||
|
Title: Visual tracking system Overview of the project Division of tasks:
webcam, microcontroller, matlab The completed project will be kept by the students to do with as they wish. |
|||||||
| 0098 | G—lge øğ■c■ | Puzzle-solving robot | 2011 Spring | Mehmet Ali Karakurt, Pena Japarov, Emrah Berberoğlu, | |||
|
Title: Puzzle-solving robot Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0097 | Arif Nacaroğlu | Record (vinyl) to CD converter | 2011 Spring | Selim úolak, , , | |||
|
Title: Record (vinyl) to CD converter Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0096 | Arif Nacaroğlu | Target finder in 3-D | 2011 Spring | Emrah Kaplan, Ramazan øzkan, , | |||
|
Title: Target finder in 3-D Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0095 | Sadettin øzyazıcı | Design and construction of a Stiquito robot | 2011 Spring | Serhan NariÓi, Celalettin Rasim Oğuzman, , | |||
|
Title: Design and construction of a Stiquito robot Overview of the project Division of tasks:
The completed project will be donated to the department for display or lab. |
|||||||
| 0094 | G—lge øğ■c■ | Cars communicating on a road | 2011 Spring | Mustafa İmrak, Mehmet KılıÓ, , | |||
|
Title: Cars communicating on a road Overview of the project The completed project will be kept by the students to do with as they wish. |
|||||||
| 0093 | Erg■n ErÓelebi | Design and construction of a machine for inspection of textile defects | 2011 Spring | Metin Atayoğlu, Ersin G—kdağ, øzg■r Yıldız, | |||
|
Title: Design and construction of a machine for inspection of textile defects Overview of the project Division of tasks:
|
|||||||
| 0092 | Erg■n ErÓelebi | Design and construction of a Pistachio sorting machine | 2011 Spring | Abdulkadir G—zuoğlu, Muharrem Balci, , | |||
|
Title: Design and construction of a Pistachio sorting machine Overview of the project Division of tasks:
The completed project will be kept by the students to do with as they wish. |
|||||||
| 0091 | Erg■n ErÓelebi | Implementation of G.711 8 kHz A-law and μ-law coding algorithm | 2011 Spring | Mehmet Dev, , , | |||
|
Title: Implementation of G.711 8 kHz A-law and μ-law coding algorithm Overview of the project In this project the student will implement the above algorithm by writing a computer program. |
|||||||
| 0090 | Tolgay Kara | Automatic tracking and distance control for vehicles | 2011 Spring | Ayşenur Emrullah, Mehmet Akif ErkoÓ, , | |||
|
Title: Automatic tracking and distance control for vehicles Overview of the project Division of tasks
|
|||||||
| 0089 | Nuran Doğru | Patient Monitor | 2011 Spring | Selma Eroğlu, Selma Aslan, , | |||
|
Title: Patient Monitor Overview of the project The completed project will be kept by the student to do with as he/she wishes. |
|||||||
| 0088 | Nurdal Watsuji | Robot ball collector | 2011 Spring | øzg■n Balkaya, Onur úevik, Şehmus Bayar, | |||
|
Title: Robot ball collector Overview of the project The completed project will be kept by the student to do with as he/she wishes. |
|||||||
| 0087 | Andrew Beddall | Two-dimensional tracking of a person walking across a room | 2011 Spring | Halil Kelo, Emrah Kurt, , | |||
|
Title: Two-dimensional tracking of a person walking across a room Overview of the project The completed project will be kept by the student to do with as he/she wishes.. |
|||||||
| 0086 | Andrew Beddall | Measurement of double-slit interference fringes | 2011 Spring | Yunus Şahin, Kayhan Sezer, , | |||
|
Title: Measurement of double-slit interference fringes Overview of the project The completed project will be donated to an undergraduate lab. |
|||||||
| 0085 | Andrew Beddall | Design and construction of an electronic weighing scale | 2011 Spring | Yasin Emre Durmuş, İlyas Firincioğulları, , | |||
|
Title: Design and construction of an electronic weighing scale Overview of the project The completed project will be kept by the student to do with as he/she wishes. |
|||||||
| 0084 | Tolgay Kara | Balloon-bouncing robot | 2011 Spring | C■neyt G—lelioğlu, Muhammed Oktay, , | |||
|
Title: Balloon-bouncing robot Overview of the project The project partners should share the following tasks equally:
|
|||||||
| 0083 | Tolgay Kara | Voice control for Matlab | 2010 Fall early | Oğuzhan İpin, , , | |||
|
Title: Voice control for Matlab Overview of the project |
|||||||
| 0081 | G—lge øğ■c■ | Comparison of OFDM technique and CDMA in wireless systems [this is a design-only project] |
2010 Fall | Doğan Pekoz, , , | |||
|
Title: Comparison of OFDM technique and CDMA in wireless systems Overview of the project |
|||||||
| 0078 | Vedat Karslı | Design and construction of a prototype levitation control system using dsPIC30F4011 | 2010 Fall | Hamit OlğaÓ, Fatih Yapıcı, , | |||
|
Title: Design and construction of a prototype levitation control system using dsPIC30F4011 Overview of the project
Specific components/tools |
|||||||
| 0077 | Rauf Mirzababayev | Voice controlled command in house lighting | 2010 Summer | Aşkın Samet Atalar, Ertuğ Babacan, , | |||
|
Title: Voice controlled command in house lighting Overview of the project
Specific components/tools |
|||||||
| 0075 | Celal Koraşlı | Road lighting using solar power | 2010 Spring | Necati Deveci, Ali Yildizhan, , | |||
|
Title: Road lighting using solar power Overview of the project
? |
|||||||
| 0074 | Savaş UÓk■n | Design and test a three-section half-wave filter | 2010 Spring | C■neyt Aktaş, , , | |||
|
Title: Design and test a three-section half-wave filter Overview of the project The correctness of design must be tested, the manner of testing should be decided by the student. The study should also be presented in paper format. |
|||||||
| 0073 | Andrew Beddall | Object location by trilateration | 2010 Fall | Şehmus Deniz, Hasan Bayram, , | |||
|
Title: Object location by trilateration Overview of the project
Specific components/tools |
|||||||
| 0072 | Sema Kayhan | A PLC controlled bottle filling system | 2010 Spring | Muhammet Atalay T■rkeş, , , | |||
|
Title: A PLC controlled bottle filling system Overview of the project |
|||||||
| 0071 | Savaş UÓk■n | Design and construction of an electrostatic precipitator | 2010 Fall | Cihan İyimutaf, , , | |||
|
Title: Design and construction of an electrostatic precipitator Overview of the project |
|||||||
| 0070 | Sema Kayhan | A car license plate recognition system | 2010 Spring | Musa Bute, , , | |||
|
Title: A car license plate recognition system Overview of the project The project will work as follows: an image is captured by a camera, then the system will identify if there is a car in the picture. Then it will identify the logo of the car, the color of the car and the license plate. It will read the license plate numbers and store it in a database.
Specific components/tools |
|||||||
| 0069 | Nuran Doğru | Simple radar design and implementation | 2010 Spring | Ufuk Şan, , , | |||
|
Title: Simple radar design and implementation Overview of the project |
|||||||
| 0068 | Celal Koraşlı | Design of sinusoidal-wave high-power signal generator for ground resistance measurement | 2010 Fall | Mehmet Şefik Kayra, Seyithan Kaya, , | |||
|
Title: Design of sinusoidal-wave high-power signal generator for ground resistance measurement Overview of the project The design is a straight forward oscillator design using power transistors, hence no specific tools are required. |
|||||||
| 0067 | Tolgay Kara | Coupled tank level control system | 2010 Summer | Yakup Altunkaynak, Fevzi Nebioğlu, , | |||
|
Title: Coupled tank level control system Overview of the project The tasks are to be shared in the following manner:
|
|||||||
| 0062 | Vedat Karslı | Design and construction of a stepping motor driver and control circuit | 2010 Spring | Mahmut Karakaş, Ramazan Demir, , | |||
|
Title: Design and construction of a stepping motor driver and control circuit Overview of the project
Division of tasks:
Specific components/tools |
|||||||
| 0061 | Vedat Karslı | A remote controlled toy car | 2010 Spring | Onur Terkesli, Sedat Cicek, , | |||
|
Title: A remote controlled toy car Overview of the project
Division of tasks
Specific components/tools |
|||||||
| 0060 | Vedat Karslı | Design and construction of 3 phase current measurement and display circuit controlled by a microcontroller (and/or DSP). | 2010 Spring | øzg■r Kayhan, ønder øzcan, , | |||
|
Title: Design and construction of 3 phase current measurement and display circuit controlled by a microcontroller (and/or DSP). Overview of the project
Specific components/tools |
|||||||
| 0059 | Vedat Karslı | Design and construction of a 500 W converter controlled by a microcontroller | 2010 Fall | Durmuş Denizli, Kemal G—z■b■y■k, , | |||
|
Title: Design and construction of a 500 W converter controlled by a microcontroller Overview of the project
Specific components/tools |
|||||||
| 0058 | Vedat Karslı | Design and construction of an anemometer speed measurement, display unit, using a microcontroller and PC | 2010 Spring | Ulaş Alacabağ, ømer Altun, Cemal Tozmaz, | |||
|
Title: Design and construction of an anemometer speed measurement, display unit, using a microcontroller and PC Overview of the project
Specific components/tools |
|||||||
| 0057 | Vedat Karslı | Design and construction of two wireless RF microcontrolled units to transfer temperature and speed data | 2009 Fall | Yunus Ozyurt, Kemal Erdoğan, , | |||
|
Title: Design and construction of two wireless RF microcontrolled units to transfer temperature and speed data Overview of the project
Specific components/tools |
|||||||
| 0056 | Vedat Karslı | Design and construction of a 0-30 V, 0-5 A adjustable power supply using a microcontroller and display unit | 2009 Spring | ømer Faruk øzayd»n, TuÞrul Metin, , | |||
|
Title: Design and construction of a 0-30 V, 0-5 A adjustable power supply using a microcontroller and display unit Overview of the project
Specific components/tools |
|||||||
| 0055 | Vedat Karslı | Design and construction of a display unit using a microcontroller and MMC card | 2009 Fall | Mehmet Baylan, Osman Kazan, , | |||
|
Title: Design and construction of a display unit using a microcontroller and MMC card Overview of the project
Specific components/tools |
|||||||
| 0054 | Vedat Karslı | Design and construction of a prototype levitation control system (say 200gr weight) using a microcontroller | 2010 Spring | Tanel Candemir, Erkan Deniz, , | |||
|
Title: Design and construction of a prototype levitation control system (say 200gr weight) using a microcontroller Overview of the project
Specific components/tools |
|||||||
| 0052 | Tolgay Kara | An autonomous robotic spider | 2010 Spring | Mehmet Emin Acer, Cuneyt Yilmaz, , | |||
|
Title: An autonomous robotic spider Overview of the project
The division of tasks is as follows: |
|||||||
| 0051 | Tolgay Kara | A sound tracking car | 2010 Spring | Mahmut Kiriktir, , , | |||
|
Title: A sound tracking car Overview of the project |
|||||||
| 0050 | Tolgay Kara | Design and construct a wearable "white stick" that aids the visually impaired as they walk. | 2009 Fall | Ali Cihan Sarsu, , , | |||
|
Title: Design and construct a wearable "white stick" that aids the visually impaired as they walk. Overview of the project |
|||||||
| 0049 | Tolgay Kara | Design and construct a motion sensitive security camera system with automatic tracking | 2010 Spring | Serdar K—seoğlu, Semih Tursun, Osman YeniÓeri, | |||
|
Title: Design and construct a motion sensitive security camera system with automatic tracking Overview of the project
|
|||||||
| 0048 | Nuran Doğru | PIC based remote control of house devices using DTMF (dual tone multi frequency) via telephone lines | 2009 Fall | Talat Keles, , , | |||
|
Title: PIC based remote control of house devices using DTMF (dual tone multi frequency) via telephone lines Overview of the project
Specific components/tools |
|||||||
| 0047 | Sema Kayhan | Design and control a conveyor band to count and separate parts on it | 2010 Spring | Fuat Deger, , , | |||
|
Title: Design and control a conveyor band to count and separate parts on it Overview of the project
Specific components/tools |
|||||||
| 0046 | Sema Kayhan | A line-following car | 2010 Spring | Adem Gedik, , , | |||
|
Title: A line-following car Overview of the project |
|||||||
| 0045 | Sema Kayhan | Car parking control system | 2009 Fall | Erhan Ersoy, , , | |||
|
Title: Car parking control system Overview of the project
Specific components/tools |
|||||||
| 0044 | Sema Kayhan | Design and construction of a PLC controlled rig | 2009 Spring | Okan KolaÞasioÞlu, , , | |||
|
Title: Design and construction of a PLC controlled rig Overview of the project
Specific components/tools |
|||||||
| 0043 | Sema Kayhan | A PLC controlled lift | 2009 Fall | Melike Bağcı, , , | |||
|
Title: A PLC controlled lift Overview of the project Basic steps of project:
Specific components/tools |
|||||||
| 0041 | Savaş Uçkun | Design and test a directional coupler in X-band | 2009 Fall | Enise úoban, , , | |||
|
Title: Design and test a directional coupler in X-band Overview of the project After overview of directional couplers, student will design and test a directional coupler in the x-band for the given specifications: the coupling factor of 25 dB, the directivity of 30 dB, the operating frequency of 9 GHz ,the input power handling capability of 50 watts; dimensions of the rectangular waveguide are 0.9 inches to 0.4 inches. The correctness of the design must be tested; the manner of testing should be decided by the student. The study should also be presented in paper format. |
|||||||
| 0040 | Sadettin øzyazıcı | POI alert employing GPS | 2010 Spring | L■tfı KılıÓ, Bertan Kahraman, , | |||
|
Title: POI alert employing GPS Overview of the project |
|||||||
| 0039 | Sadettin øzyazıcı | Wireless pulse sensor | 2010 Spring | H■seyin úomruk, , , | |||
|
Title: Wireless pulse sensor Overview of the project |
|||||||
| 0038 | Sadettin øzyazıcı | Design of FM remote transmitter and receiver | 2009 Fall | Selim G■lhan, Memiş şıkşık, , | |||
|
Title: Design of FM remote transmitter and receiver Overview of the project |
|||||||
| 0037 | Rauf Mirzababayev | Temperature and humidity measurements with a photocell as an energy source | 2010 Spring | G■nay Dengiz, Mehmet Ileri, , | |||
|
Title: Temperature and humidity measurements with a photocell as an energy source Overview of the project
Specific components/tools |
|||||||
| 0036 | Rauf Mirzababayev | Velocity measurement using the doppler effect | 2010 Spring | Yaser IÓer, T■lin TunÓ, , | |||
|
Title: Velocity measurement using the doppler effect Overview of the project |
|||||||
| 0035 | Rauf Mirzababayev | A pulsemeter design for non invasive pulse measurement | 2009 Fall | Ergin Han Kızılay;, , , | |||
|
Title: A pulsemeter design for non invasive pulse measurement Overview of the project
Specific components/tools |
|||||||
| 0034 | Rauf Mirzababayev | Wireless transmission of vibration signals | 2009 Spring | Okan ErdoÞan, Adem Y»lmaz, , | |||
|
Title: Wireless transmission of vibration signals Overview of the project |
|||||||
| 0033 | Rauf Mirzababayev | Voice Communication via power line | 2010 Spring | Tarik Dağcı, , , | |||
|
Title: Voice Communication via power line Overview of the project |
|||||||
| 0032 | Nurdal Watsuji | Intelligent wireless pedometer | 2010 Spring | øzden Parsak, Halil Karagedik, , | |||
|
Title: Intelligent wireless pedometer Overview of the project
Specific components/tools |
|||||||
| 0031 | Nuran Doğru | Wireless home security system with microcontroller | 2010 Spring | Ugur Uysal, Fatih Uysal, , | |||
|
Title: Wireless home security system with microcontroller Overview of the project
Specific components/tools |
|||||||
| 0030 | Nuran Doğru | Digital voice recorder using microcontroller | 2010 Spring | Hamdi Besli, , , | |||
|
Title: Digital voice recorder using microcontroller Overview of the project
Specific components/tools |
|||||||
| 0029 | Nuran Doğru | Sending audio signals with a laser beam | 2010 Spring | Tuna Aslan, şuayip TURGUT, , | |||
|
Title: Sending audio signals with a laser beam Overview of the project |
|||||||
| 0028 | Nuran Doğru | PC to PC laser communication | 2009 Spring | Fatih R. ú»kan, Muhammed Mekin, , | |||
|
Title: PC to PC laser communication Overview of the project
Specific components/tools |
|||||||
| 0027 | G—lge øğ■c■ | Safety on the streets for the blind | 2010 Spring | Utku Akbas, Sultan Karaoğlan, , | |||
|
Title: Safety on the streets for the blind Overview of the project
Student 1 will design the transmitter part
Specific components/tools |
|||||||
| 0026 | G—lge øğ■c■ | "Read out loud" device | 2010 Spring | Nihat Kartakuslu, Nafiz alkan Karahan, , | |||
|
Title: "Read out loud" device Overview of the project |
|||||||
| 0025 | G—lge øğ■c■ | Temperature regulator | 2009 Spring | Sait G■leÓ, , , | |||
|
Title: Temperature regulator Overview of the project If the temperature goes beyond 20 C, the device will produce a warning alarm. It will also store the time since when the temperature is high. |
|||||||
| 0024 | Erg■n ErÓelebi | PIC-based musical doorbell | 2010 Spring | Abdullah úelebi, , , | |||
|
Title: PIC-based musical doorbell Overview of the project |
|||||||
| 0023 | Erg■n ErÓelebi | PIC-based digital clock | 2010 Spring | Abdullah Taka, , , | |||
|
Title: PIC-based digital clock Overview of the project |
|||||||
| 0022 | Erg■n ErÓelebi | Real time application of adaptive filter for noise elimination | 2010 Spring | Abdulhaluk Yararlı, , , | |||
|
Title: Real time application of adaptive filter for noise elimination Overview of the project |
|||||||
| 0021 | Erg■n ErÓelebi | Design and implementation of improvements to a 900MHz GSM jammer | 2010 Spring | Ibrahim Sahin, , , | |||
|
Title: Design and implementation of improvements to a 900MHz GSM jammer Overview of the project |
|||||||
| 0020 | Erg■n ErÓelebi | Real time implementation of an edge detection algorithm | 2010 Spring | Veli G—koglu, , , | |||
|
Title: Real time implementation of an edge detection algorithm Overview of the project |
|||||||
| 0019 | Erg■n ErÓelebi | GSM-900 mobile jammer design | 2009 Fall | Fatih Pazarlıoğlu, , , | |||
|
Title: GSM-900 mobile jammer design Overview of the project
Specific components/tools |
|||||||
| 0018 | Erg■n ErÓelebi | Calculator design using PIC | 2009 Fall | Oğ■z Zeybek, , , | |||
|
Title: Calculator design using PIC Overview of the project
Specific components/tools |
|||||||
| 0017 | Erg■n ErÓelebi | RF communication network design | 2009 Fall | Erg■n Menetlioğlu, , , | |||
|
Title: RF communication network design Overview of the project
Specific components/tools |
|||||||
| 0016 | Erg■n ErÓelebi | PIC development board | 2009 Spring | Mehmet úatalba±, , , | |||
|
Title: PIC development board Overview of the project |
|||||||
| 0015 | Erg■n ErÓelebi | Radar system simulation program | 2009 Fall | Mustafa Bolat, , , | |||
|
Title: Radar system simulation program Overview of the project
Specific components/tools |
|||||||
| 0014 | Celal Koraşlı | A microcontroller based automatic sun tracker | 2010 Spring | Mesut Demir, Arda Kuş, , | |||
|
Title: A microcontroller based automatic sun tracker Overview of the project In the design it is expected to control a photovoltaic sun tracker panel monitored under the control of a microcontroller for its maximum power output. For the end activation a stepper motor shall be implemented. |
|||||||
| 0013 | Celal Koraşlı | Power factor correction for domestic usage | 2010 Spring | Otgon Zandan, Erkan Gunes, , | |||
|
Title: Power factor correction for domestic usage Overview of the project |
|||||||
| 0012 | Celal Koraşlı | Reading and recording of sequential data | 2009 Fall | Ismail T■rk, Alparslan Tanis, , | |||
|
Title: Reading and recording of sequential data Overview of the project
Specific components/tools |
|||||||
| 0010 | Celal Koraşlı | Inactivation of microorganisms in liquids under high voltage oscillatory pulses | 2010 Fall | Abdulkadir Korkmaz, , , | |||
|
Title: Inactivation of microorganisms in liquids under high voltage oscillatory pulses Overview of the project |
|||||||
| 0009 | Arif Nacaroğlu | Recorder of pauses in breathing during sleep | 2012 Spring | øzgecan Ekim, , , | |||
|
Title: Recorder of pauses in breathing during sleep Overview of the project |
|||||||
| 0008 | Arif Nacaroğlu | Detecter of long pauses in breathing during sleep | 2010 Spring | Abdullah úalışkan, , , | |||
|
Title: Detecter of long pauses in breathing during sleep Overview of the project |
|||||||
| 0007 | Arif Nacaroğlu | Target tracker on a plane surface | 2010 Fall | Fatma Bakır, Meryem Kabasakal, , | |||
|
Title: Target tracker on a plane surface Overview of the project
Division of tasks |
|||||||
| 0006 | Arif Nacaroğlu | Holding robot | 2009 Fall | M. Ali Kalendar, øzan G■l, , | |||
|
Title: Holding robot Overview of the project
Specific components/tools |
|||||||
| 0005 | Tolgay Kara | Mathematical modeling and optimal control of a greenhouse process (design only) | 2010 Spring | Mesut Coşkun, , , | |||
|
Title: Mathematical modeling and optimal control of a greenhouse process (design only) Overview of the project |
|||||||
| 0004 | Andrew Beddall | Random number circuit | 2010 Spring | Ali Recai úelik, Muhammet øzdemir, , | |||
|
Title: Random number circuit Overview of the project |
|||||||
| 0002 | Andrew Beddall | An intelligent traffic light flow controller | 2010 Spring | Hasan Toks—z, , , | |||
|
Title: An intelligent traffic light flow controller Overview of the project
Specific components/tools |
|||||||
| 0001 | Andrew Beddall | Electronic timer for a "simple pendulum" experiment | 2010 Spring | Kudbettin Altun, , , | |||
|
Title: Electronic timer for a "simple pendulum" experiment Overview of the project
Specific components/tools |
|||||||
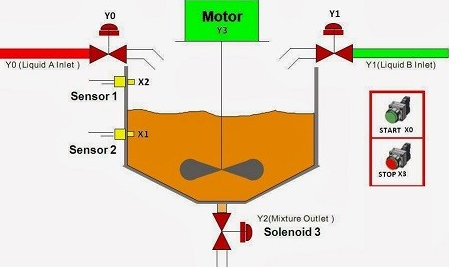
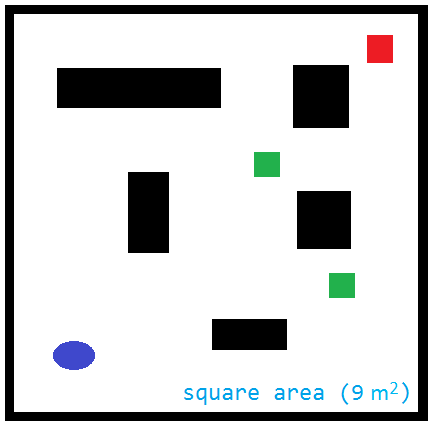
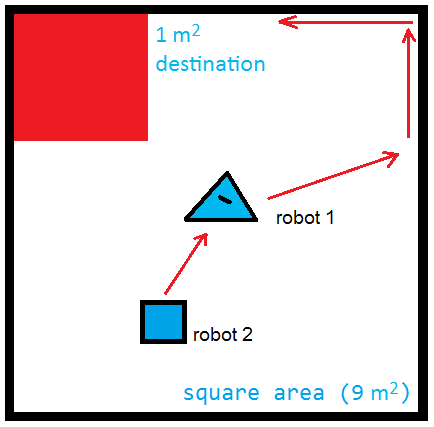

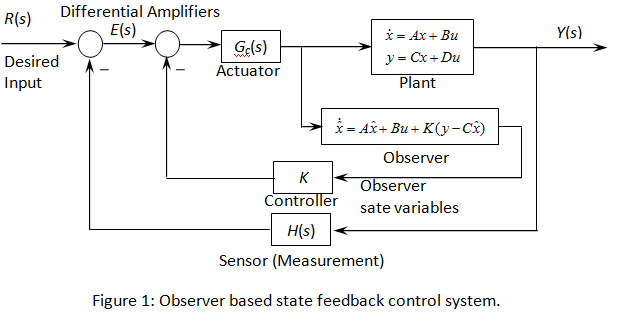
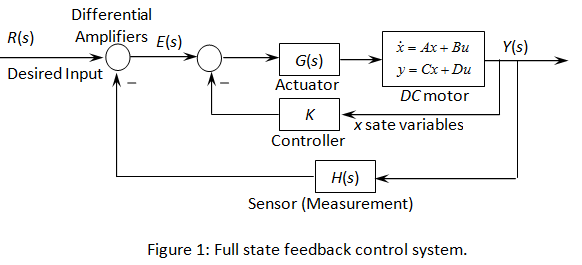
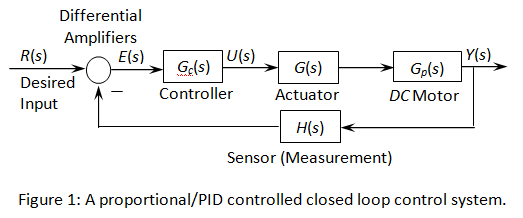
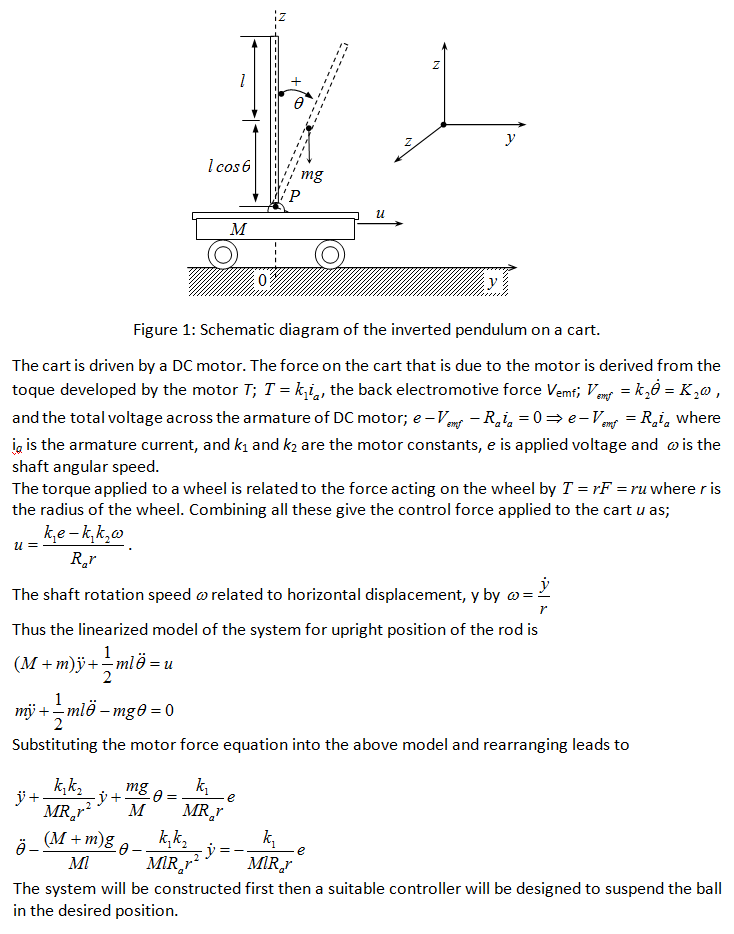
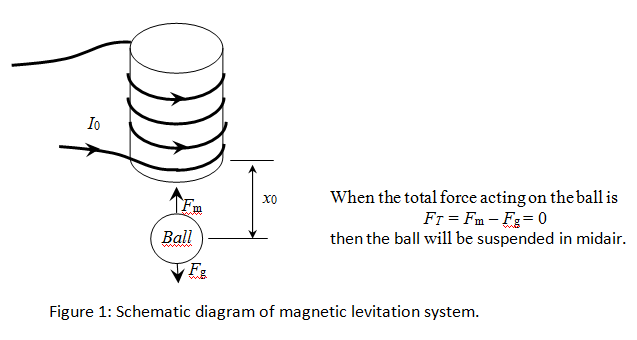
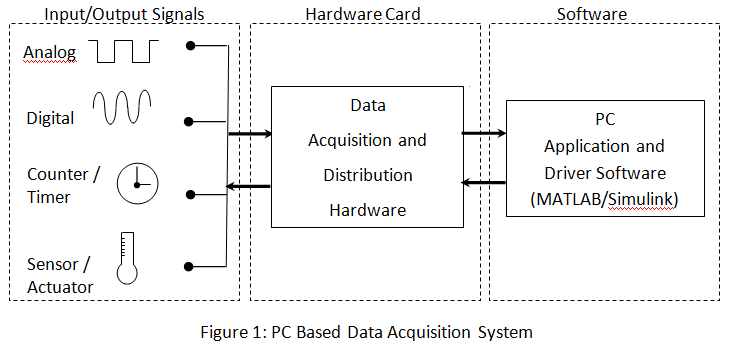
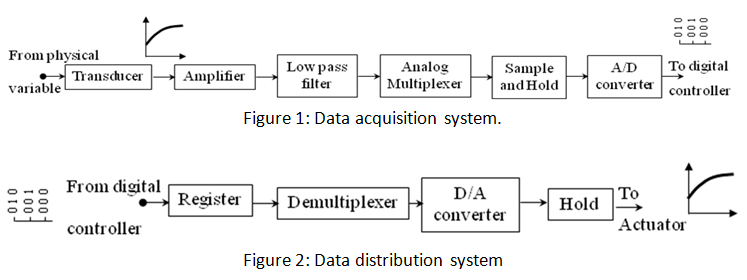
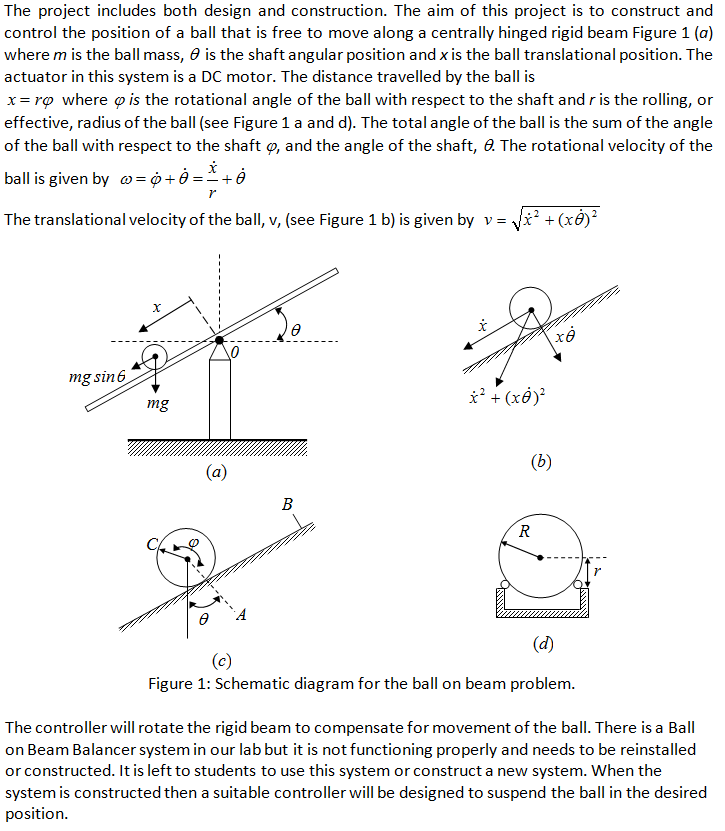
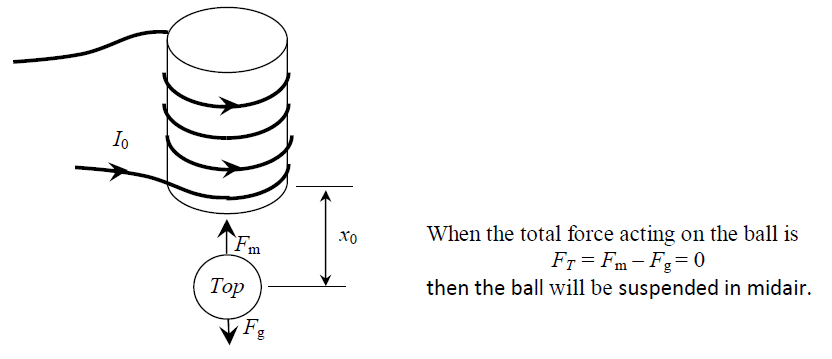
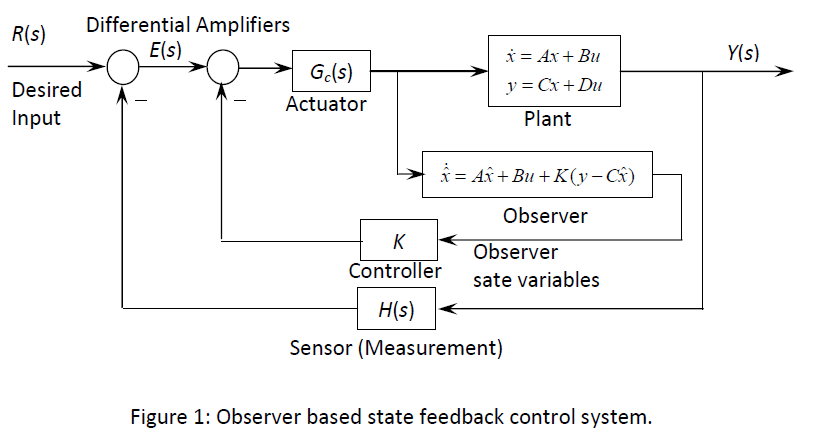
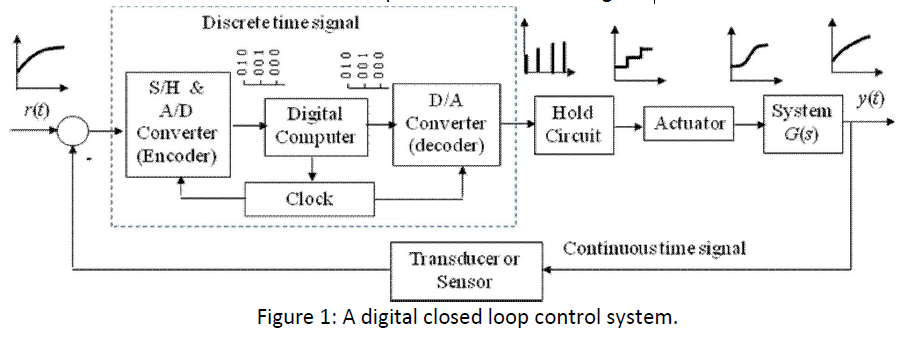
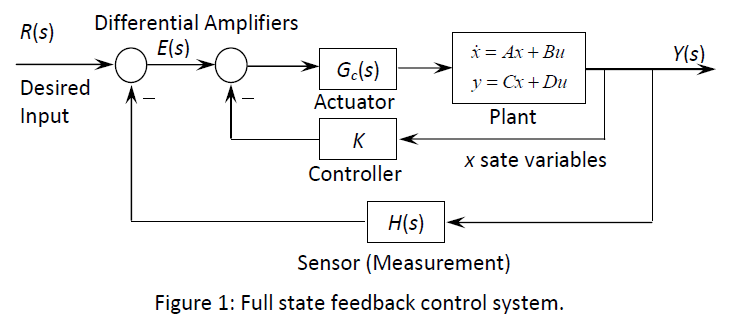
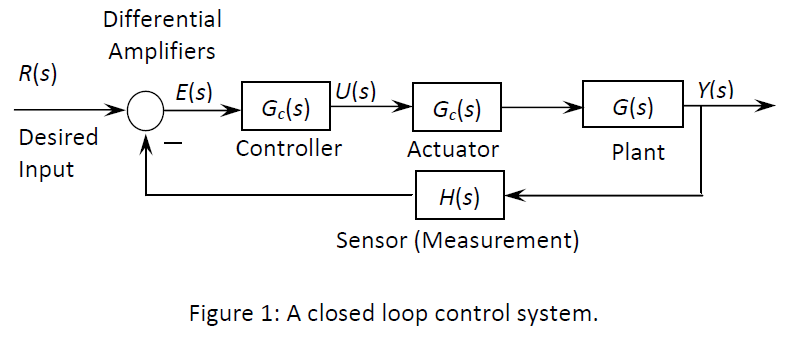
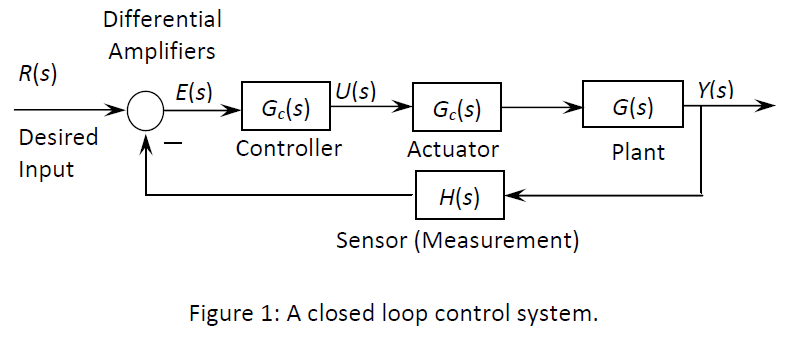
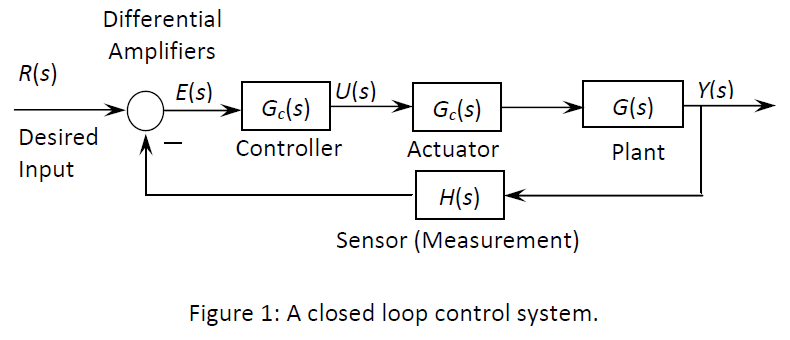
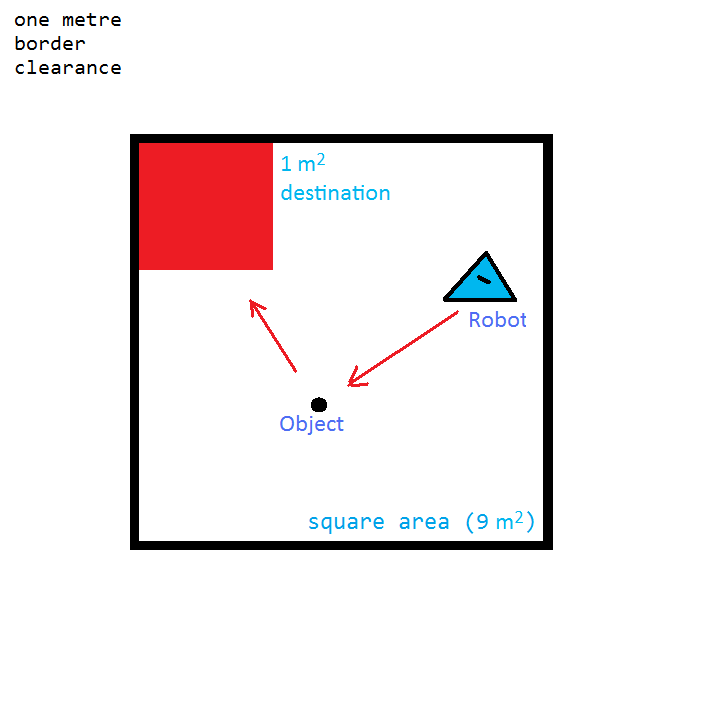{kind=link}
{kind=link}
{kind=link}